Projet ROB3 : Mathys CLAUDEL, Sarah EL ZEGHENDY, Romain DARDE
Projet ROB3 S6
ROBOT ÉCRIVAIN
Un modèle de documentation minimal pour tous les types de projets. Toutes les catégories ci-dessous doivent être renseignées, même de façon succincte.IMPORTANT : Merci de sélectionner le / les tags adéquats dans le menu de droite, et de ne pas créer de nouveau tag.Les fichiers sources doivent idéalement être joints à cette page grâce à l'icône trombone du menu de droite.Des hésitations sur comment bien documenter et utiliser l'interface ? Consultez le tutoriel "Comment documenter"
Informations
- Mathys CLAUDEL
- mathysclaudel@gmail.com
- Sarah EL ZEGHENDY
- sarah.el_zeghendy@etu.sorbonne-universite.fr
- Romain DARDE
- romaindarde.rd@gmail.com
- Date de début : 08/02/2024 - Date de fin : 02/05/2024
Contexte
Objectifs
L’objectif principal de ce projet est de concevoir et réaliser un système robotique, c’est-à-dire sa partie mécanique, sa motorisation, sa commande et son interface de pilotage. Le cahier des charges fourni précise les fonctions que doit réaliser le système et les contraintes qu’il doit respecter.
I. Cahier des charges :
Le robot doit être fixé ou posé sur une plaque horizontale carrée de 250mm par 250mm. Il doit être capable de réaliser deux exercices :
-
1) Tracer, avec l’aide d’un crayon fixé sur l’organe terminal du robot, dans le plan de la plaque support différentes figures imposées de difficulté croissante :
a. Une ligne de 5cm de long,
b. Une ligne pointillée de 5cm de long,
c. Un cercle de 2.5cm de rayon,
d. Un cercle pointillé de 2.5cm de rayon.
Le tracé de chacune des figures doit être réalisé en 10 secondes +/- 0.2 secondes.
-
2) Tracer, avec l’aide d’un crayon fixé sur l’organe terminal du robot, dans le plan de la plaque support, un dessin imposé dans un carré de 5cm par 5cm. Le déplacement de l’organe terminal du robot devra être piloté par un joystick. Il est possible que la figure soit discontinue, et donc il faut prévoir de pouvoir relever le crayon du support horizontal sur lequel on écrit.
Image du projet
Matériel
- Un crayon
- Interface de commande :
- Une carte arduino UNO avec câble USB-B;
- Un joystick:
- Une platine de protoypage;
- Alimentation régulée 5V ;
- Câbles, LEDs, boutons poussoirs, résistances.
- Motorisation :
- Deux servomoteurs HS422 180°;
- Un servomoteur Emax ES08A 180°.
- Mécanique :
- Matière PLA pour impression 3D;
- Feuilles medium : 3mm et 6mm d'épaisseur;
- Vis et écrous : M2, M2.5, M3, M4.
- Roulements et axes de diamètre 4mm.
Machines utilisées
- Découpe laser
ConstructionSolutions proposées
(Fichiers, photos, code, explications, paramètres d'usinage, photos, captures d'écran...)
Étape 1
----
ÉtapeSolutions 2
Choisie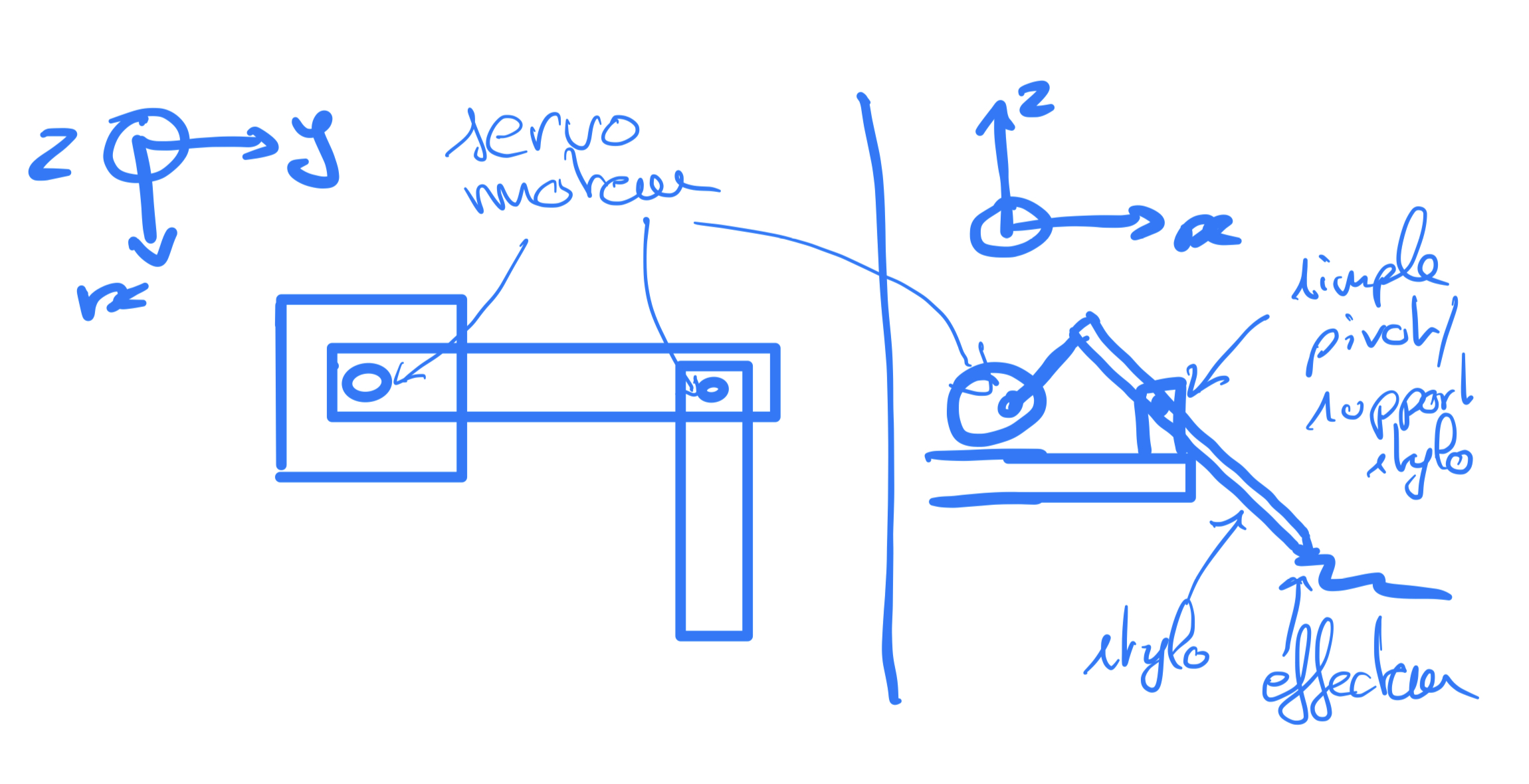
----
Risques
Étape
3
----
Journal de bord
Avancée du projet à chaque étape, difficultés rencontrées, modifications et adaptations (facultatif pour les petits projets)
08/02/2024
Décision de la première version du robot.
Robot mark I :
11/04/2022
Phasellus in purus quis justo feugiat vestibulum quis eu lacus. 😎 Etiam maximus metus vel massa pharetra convallis. Curabitur vel nunc orci. Praesent dolor dui, laoreet non massa non, pellentesque vestibulum quam. Sed posuere, dui quis semper pulvinar, eros nibh commodo elit, nec auctor arcu est et purus.
18/04/2022
Maecenas interdum turpis sit amet rutrum elementum. Aenean eget accumsan ligula. Phasellus et scelerisque lectus. Cras vel venenatis nulla. Integer tristique non diam et molestie. Pellentesque condimentum enim arcu, in commodo nunc commodo vel. Integer vitae neque facilisis, mattis elit sit amet, gravida turpis. Maecenas lectus mauris, fringilla ut lectus eu, condimentum finibus tortor 🤩🤩🤩