Remplisseur automatique de bouteille
UE 803 - Optimisation et
ContrôContrôle desProcédéProcédés - Master 2 -IngéIngénierie Chimique
Noms et
PréPrénoms :
- Nicolas Laloy (nicolas.laloy.1@etu.sorbonne-universite.fr)
- Mohamed Hachcham (mohamed.hachcham@etu.sorbonne-universite.fr)
- Faysal Bellahouel (faysal.bellahouel@etu.sorbonne-universite.fr)
- Jakub Gontarz (jakub.gontarz@etu.sorbonne-universite.fr)
- Muhammad Aminibayat (Mohammad.aminibayat@etu.sorbonne-universite.fr)
Cursus : Master de Chimie :
SpécialitéSpécialitéIngéIngénierie ChimiqueDate de
dédébut : 01/09/2023Date de fin : 01/02/2024
Introduction :
Ce projet a pour but de nous familiariser avec des notions et des
ééquipementstournétournés vers l'automatisation et larérégulation.Objectif :
L'objectif est de
réréaliser un petitsystèsystème qu'est le remplisseur automatique de bouteille. Il s'agit donc remplir plusieurs bouteilles de couleursdiffédifférentes avec le liquideassociéassociéàà la couleur (par exemple : jus d'orange -> bouteille orange).
MatéMatériaux / Outils / Machines (le plusdétaillédétaillé possible)
- 2 pompes
- 1 carte arduino et son
câcâbleX1.5 m de tuyauxX12 fils de connexion21relaisrelai pour l'arduino- 1 adaptateur
- 1 alimentation
- 1 tapis roulant comprenant un moteur
àà courant continu- 1 support en bois et aluminium
- 1
dédétecteur IR de position et lerérécepteurassociéassociéConstruction (fichiers, photos, code, texte,
paramèparamètresd’d’usinage etc.)Journal de bord (
éétapesdatédatées du projet)
- 06/11 - Choix du projet et conception :
On a porter notre
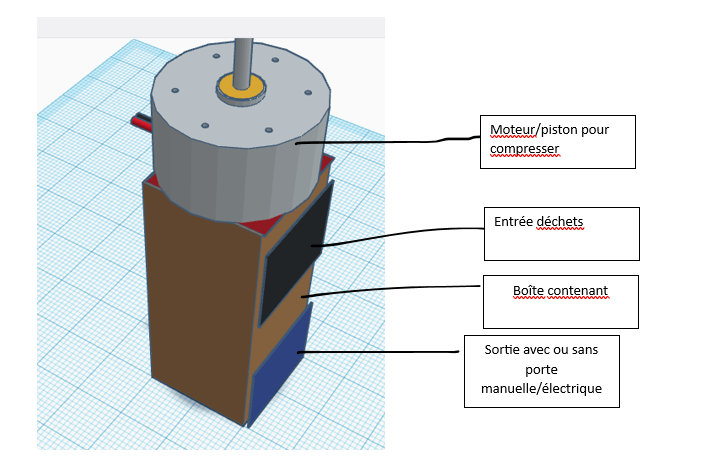
réréflexion sur 2 projet type : compresseur dedédéchet automatique et un remplisseur de bouteilles automatique
Figure 1:
SchéSchéma de compresseur automatique
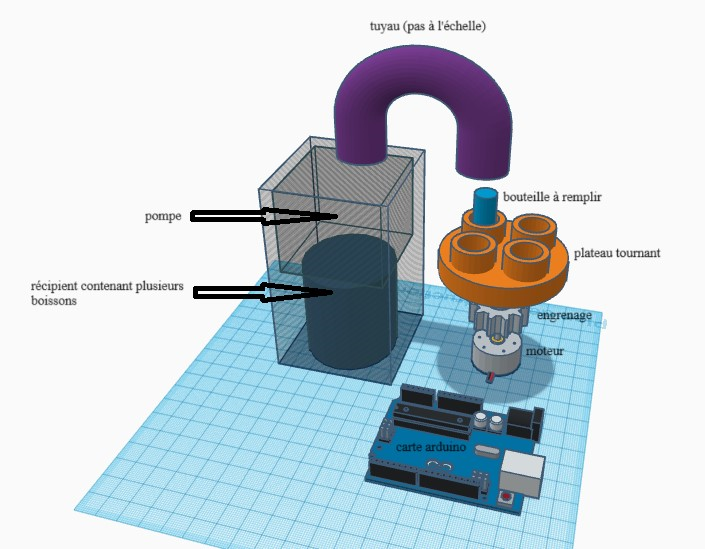
Figure 2 :
SchéSchéma de remplisseur automatiqueNous avons
dédébattu dediffédifférentsschéschémas de conception pour les 2 projets.AprèAprès avoirdemandédemandél’l’avisàà notreréféréférent, il nousààétéétéconseilléconseillé de porter notre attention sur le remplisseur automatique.Partie journal de bord
- 13/11 - Listage du
matématérielnénécessaire au deux projets / Audit del’l’inventaire au FabLab : On aenvoyéenvoyé unepremièpremière liste pour lematématérielnénécessaire au remplisseur de bouteille automatique. A la demande de notreréféréférent, nous avons faitl’l’inventaire dumatématériel disponible au FabLab pour ensuitel’l’enlever de la liste dumatématérielnénécessaire.
- 20/11 -
RécupéRécupération dumatématérieldemandédemandé : Nous avonsrécupérérécupéré une partie dumatématérieldemandédemandéaprèaprès laréréceptiond’d’un mail de Pr. Pulpytel demandant auxdiffédifférents groupes de venirrécupérécupérer lesdiffédifférents composantsdéjàdéjà disponibles. Nous avons aussidécidédécidé de remplacer la plaque tournante de la remplisseuse par un rouleau automatique disponible dans le stock dematématériel. Nous somme ensuite aller au FabLab pour commencerààréfléréfléchiràà la conception de notre projet avec lesélééléments maintenantpréprésent. Nous avons commencer par tester tout les composantsnénécessitant une alimentationàà l'aide d'une batterie de 12V. Puis dans un premier temps pour pouvoir connecter lesrelaisshields au moteurs des pompes et aux moteurs du tapis nous avons nousinitiéinitiéàà la soudure avec l'aide du personnel du FabLab.
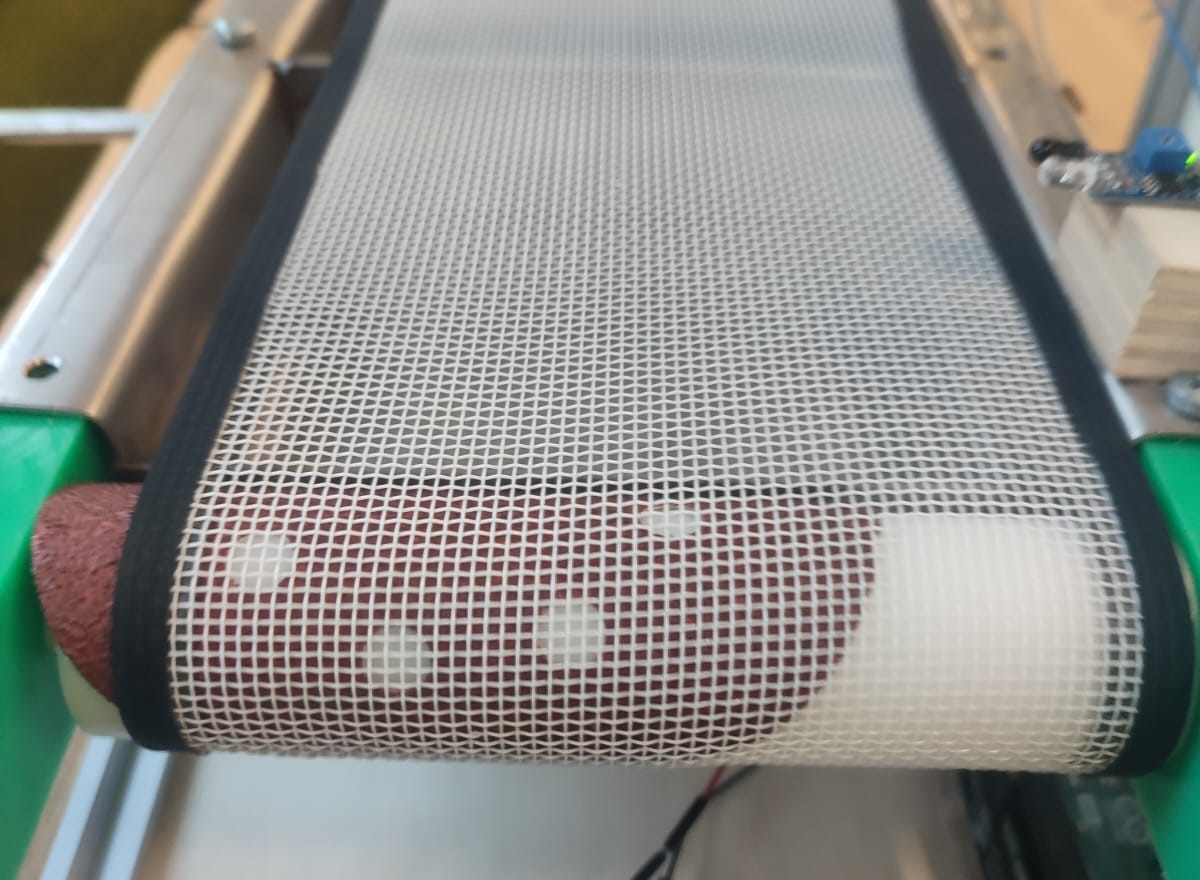
- 27/11 - Le tapis roulant
éétant trop glissant nous avonsapportéapporté des modifications pour provoquer plus de frottement entre le tapis et le rouleau. Faute decolorimècolorimètre il nouséétait impossible de mettre en place unerérégulation de la couleur du liquide en fonction de la couleur du gobelet.
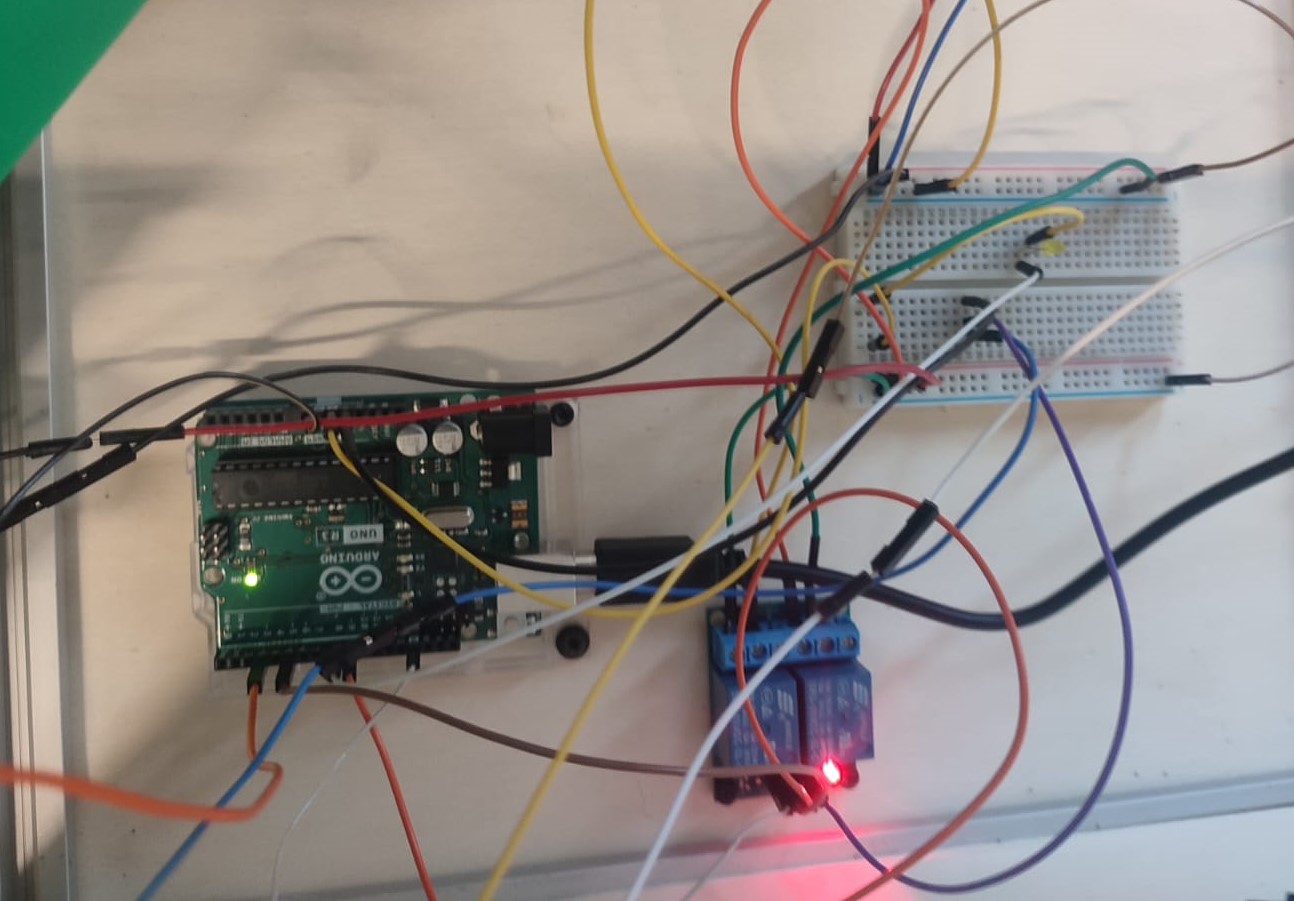
Nous avonsbranchébranché les pompes et le moteur du tapis aurelaisrelai le toutliéliéàà la carte Arduino via une breadboard.20/11/12 - Le support en aluminiumààétéétérécupérer.récupéré. Une des pompesdédéfectueuseààétéétééchangééchangé. L'ensemble de noscomposantcomposants demande une alimentationsupésupérieuràà 9V ( pompes + moteur ). Nous avons donc choisi d'utiliséutilisé une alimentation de 12Vbranchébranchéàà une prise de courant.NéNéanmoins afin d'ééviter de griller les circuits de la carte Arduino et parproblèproblème decompatibilitécompatibilité de la sortie de l'alimentation nous avonsutiliséutilisé un adaptateur:pour relier l'alimentation directement à la breadboard.
pour relier l'alimentation directement à la breadboard.- 22/12 - Nous avons
fixéfixé les pompesàà notre support endédécoupant celui-ciàà l'aide d'une perceuse avec un emboue sciecloche.cloche, et en serrant un fil en Aluminium, accroché au support par de petit trous, sur les deux pompes .- 11/01 - Nous avons
fixéfixé la carte Arduino, la breadboard, le Shield ainsi que l'adaptateur de l'alimentation au supportàà l'aide de perceusepréprésente au Fablab :
Afin d'amener le tuyau de liquide au gobelet nous avonsajoutéajouté un supportàà l'aide des chutes de boispréprésents au Fablab. Le tapis roulantéétant trop volumineux nous le fixerons pas au support :
Il ne nous reste plus que le code Arduinoàà fournir.Nous avons fait quelques tests en utilisant ChatGPT pour tester le fonctionnement de chaque composant seul.
Après nous être assuré du bon fonctionnement de tout nos composants et après verification des liaisons entre la breadboard, l'Arduino et chaque composant (le terme composant étant relatif aux pompes, detecteur-recepteur IR et moteur faisant tourner le rouleau)
Un test pour verifier le debit volumique des pompes a été fait en utilisant une éprouvette graduée emprunté au FabLab Chimie et un chronomètre (sur téléphone). Un temps de 7 secondes à été jugé suffisant pour que le débit de la pompe puisse remplir un gobelet.
Quelques tests du système à partir de codes génerés par ChatGPT ou trouvés sur des forums sur le site d'Arduino (ainsi que d'autres sites internet) ont été effectués, sans succès. Cet échec étant dû au fait que les codes implantés au système ne réussissaient pas a transmettre le signal du detecteur-recepteur IR et à activer la pompe pendant 7secondes tout en arretant le moteur pour le rouleau.
12/01 - Nous avons
commencéréussiàà configurer notre capteur IRàà l'aide du site suivant :
https://mataucarre.fr/index.php/2017/05/24/capteur-de-proximite-infra-rouge-fc-51-arduino/
Notre code est donc le suivant :int led = 8;
int capteur = 3;
int detection;
const int moteurPin = 9;
const int pompePin = 5;
unsigned long activationTime = 0;
const unsigned long dureeActivation = 7000; // Temps d'activation de la pompe en millisecondesvoid setup() {
pinMode(led, OUTPUT);
pinMode(capteur, INPUT);
pinMode(moteurPin, OUTPUT);
pinMode(pompePin, OUTPUT);
}void loop() {
// Lecture de la valeur de l'interface OUT du capteur
detection = digitalRead(capteur);// Si on
dédétecte une personne, on allume la LED et active la pompe
if (detection == 0) {
digitalWrite(led, HIGH);
digitalWrite(moteurPin, LOW);
delay(1000);
digitalWrite(pompePin, HIGH);
delay(7000);
digitalWrite(moteurPin, HIGH);
digitalWrite(pompePin, LOW);
delay(2000);
// Enregistre le temps d'activation de la pompe
activationTime = millis();
} else {
// Si on nedédétecte personne et que la pompe est encore active,
// onééteint la LED et la pompeaprèaprès ladurédurée d'activationspécifiéspécifiée
if (millis() - activationTime < dureeActivation) {
digitalWrite(led, LOW);
digitalWrite(moteurPin, HIGH);
digitalWrite(pompePin, LOW);
}
}
}
Nous avonsfixéfixé le capteur IRàavec une vis sur un bout de bois, ce bout de bois étant lui même collé à la courroie detapis.tapisNous avons testé notre pompe avec deà l'eau pour connaître le temps de remplissageaide d'ununegobeletcolle=trouvée7ausecondes.FabLab.




Partie Bibliographie/Ressources :
-Nous nous sommes essentiellement
basébasé sur le projetprésentéprésenté sur le site ci-dessous afin d'avoir uneidéidée globale : https://www.robotique.tech/tutoriel/systeme-de-remplissage-des-bouteilles-controle-par-arduino/-Nous nous sommes aussi
aidéaidé dediffédifférentesvidévidéos YouTube ci-dessous pour avoir uneidéidée pluspréprécise concernant les branchement, le codage et lematématérielnénécessaire :https://www.youtube.com/watch?v=26YH8Mtsxzg&t=1004s
https://www.youtube.com/watch?v=s5Z1mjQnKWY&t=437s
-N'ayant pas
forcéforcément fait d'éétude de codage, nous nous sommeaidéaidé dediffédifférents sites:https://www.robotique.tech/tutoriel/commander-une-pompe-a-eau-par-la-carte-arduino/ Pour le
contrôcontrôles des pompes.https://www.arduino.cc/reference/fr/ Pour
connaîconnaître les commandes deréféréférences d'Arduino.https://chat.openai.com/ L'IA ChatGPT afin de corriger nos erreurs de codes
https://mataucarre.fr/index.php/2017/05/24/capteur-de-proximite-infra-rouge-fc-51-arduino/ Aide pour le codage du capteur IR