Projet final prototypage Louly Chloé Eloïse
Louly.gurumi — Peluche mobile crochetée sur robot télécommandé
🎯 Définition du projet
Nom du projet : Louly.gurumi
Objectif :
Créer une plateforme robotique télécommandée sur laquelle on pose un animal crocheté à la main, comme une mascotte mobile.
L’idée est de donner vie aux créations en crochet en les posant sur une base motorisée que l'on peut diriger à distance.
👥 Besoin & utilisateurs
Utilisateurs visés :
-
Créateurs et créatrices de crochet
-
Enfants (objet ludique)
-
Grand public (objets décoratifs vivants)
-
Ateliers pédagogiques autour de l’électronique + artisanat
Besoins identifiés :
-
Mettre en mouvement une peluche crochetée sans câblage visible
-
Base discrète et mobile
-
Plateforme réutilisable avec différents personnages
✨ Fonctionnalités
Fonction principale
-
Plateforme roulante contrôlée par télécommande infrarouge
Fonctionnalités secondaires
-
Plateforme stable pour recevoir différents personnages
-
Capot personnalisable (impression 3D)
-
Nom/logo gravé par découpe laser
🔍 Veille & inspirations
-
Châssis Magician DG007 utilisé dans l’enseignement Arduino
-
Projets similaires de robots décorés (sumo bots, robots mascottes)
-
Personnalisation artistique (dômes, textures, peinture)
📄 Lean Canvas
| Élément | Contenu |
|---|---|
| Problème | Les créations artisanales (crochet) sont statiques |
| Clientèle | Créatrices/créateurs, enfants, enseignants |
| Proposition | Plateforme mobile pour donner vie aux créations |
| Solution | Châssis + Arduino + télécommande + support crochet |
| Canaux | Wiki du FabLab, réseaux sociaux, démonstrations |
| Revenus | Projet open-source / kit éducatif à vendre |
| Coûts | Moins de 20€ (châssis, Arduino, impression 3D) |
| Avantage | Personnalisation totale, lien entre tech et art |
🧰 Choix techniques
| Élément | Détail |
|---|---|
| Structure mobile | Châssis DG007 (2 roues + roue folle) |
| Électronique | Arduino Uno + shield moteur + récepteur IR |
| Contrôle | Télécommande infrarouge classique |
| Alimentation | Pack de piles AA |
| Support supérieur | Planche découpée au laser (MDF 3 mm) |
| Capot/dôme | Impression 3D (dôme 10 cm rayon, 14 cm hauteur) |
| Décoration | Logo “Louly.gurumi” gravé à l'avant du capot |
📅 Gestion de projet
MVP (Minimum Viable Product)
-
Robot motorisé pilotable à distance
-
Dôme supportant un personnage crocheté
Planning
| Semaine | Tâche |
|---|---|
| 1 | Recherche, prototypage, test du châssis |
| 2 | Impression 3D du dôme, découpe laser de la base |
| 3 | Programmation Arduino + test moteurs |
| 4 | Assemblage final, ajout peluche, documentation |
✏️ Croquis / Design (à insérer sur wiki)
-
Vue isométrique du robot + capot + peluche crochetée
-
Schéma du câblage Arduino + shield moteur + récepteur IR
-
Capture d'écran du modèle 3D du dôme (dans Tinkercad)
🧾 Matériel utilisé
| Élément | Quantité | Remarque |
|---|---|---|
| Arduino Uno | 1 | Contrôle général |
| Shield moteur (DFRobot / L298P) | 1 | Contrôle des moteurs |
| Récepteur IR | 1 | Réception télécommande |
| Télécommande IR | 1 | Contrôle à distance |
| Châssis DG007 | 1 | Plateforme roulante |
| Moteurs DC | 2 | Déjà montés |
| Roue folle | 1 | Stabilisation |
| Batterie (6xAA) | 1 | Alimentation mobile |
| Planche MDF 3 mm | 1 | Découpe laser (180x120 mm) |
| PLA | - | Impression 3D du dôme |
| Animal crocheté | 1 | Personnage personnalisé |
💻 Code Arduino (extrait de base IR + moteurs)
#include <IRremote.h>
int RECV_PIN = 11;
IRrecv irrecv(RECV_PIN);
decode_results results;
int motor1A = 3;
int motor1B = 11;
int motor2A = 5;
int motor2B = 6;
void setup() {
Serial.begin(9600);
irrecv.enableIRIn();
pinMode(motor1A, OUTPUT);
pinMode(motor1B, OUTPUT);
pinMode(motor2A, OUTPUT);
pinMode(motor2B, OUTPUT);
}
void loop() {
if (irrecv.decode(&results)) {
long command = results.value;
if (command == 0xFFA25D) { // bouton avant
digitalWrite(motor1A, HIGH);
digitalWrite(motor1B, LOW);
digitalWrite(motor2A, HIGH);
digitalWrite(motor2B, LOW);
} else if (command == 0xFF629D) { // bouton arrière
digitalWrite(motor1A, LOW);
digitalWrite(motor1B, HIGH);
digitalWrite(motor2A, LOW);
digitalWrite(motor2B, HIGH);
} else {
digitalWrite(motor1A, LOW);
digitalWrite(motor1B, LOW);
digitalWrite(motor2A, LOW);
digitalWrite(motor2B, LOW);
}
irrecv.resume();
}
}
🧪 Tests, essais & ajustements
-
✅ Test moteurs : avec code minimal
-
✅ Test d’adhérence du châssis + poids peluche
-
✅ Test de portée IR
-
✅ Ajustement forme du dôme pour stabiliser la peluche
-
❌ Problème résolu : alimentation insuffisante au début (USB seul)
🏗️ Réalisation physique
-
✔️ Montage Arduino + shield + châssis
-
✔️ Impression du dôme (Tinkercad → IdeaMaker)
-
✔️ Découpe laser de la planche avec trous
-
✔️ Gravure “Louly.gurumi” sur la plaque
-
✔️ Collage du dôme au centre
-
✔️ Pose de la peluche sur le dessus
📸 Photos à intégrer
-
Montage du châssis :
- Modélisation 3D du dome sur TINKERCAD :

- Extraction du dome sur IDEAMAKER et paramètres d'impression
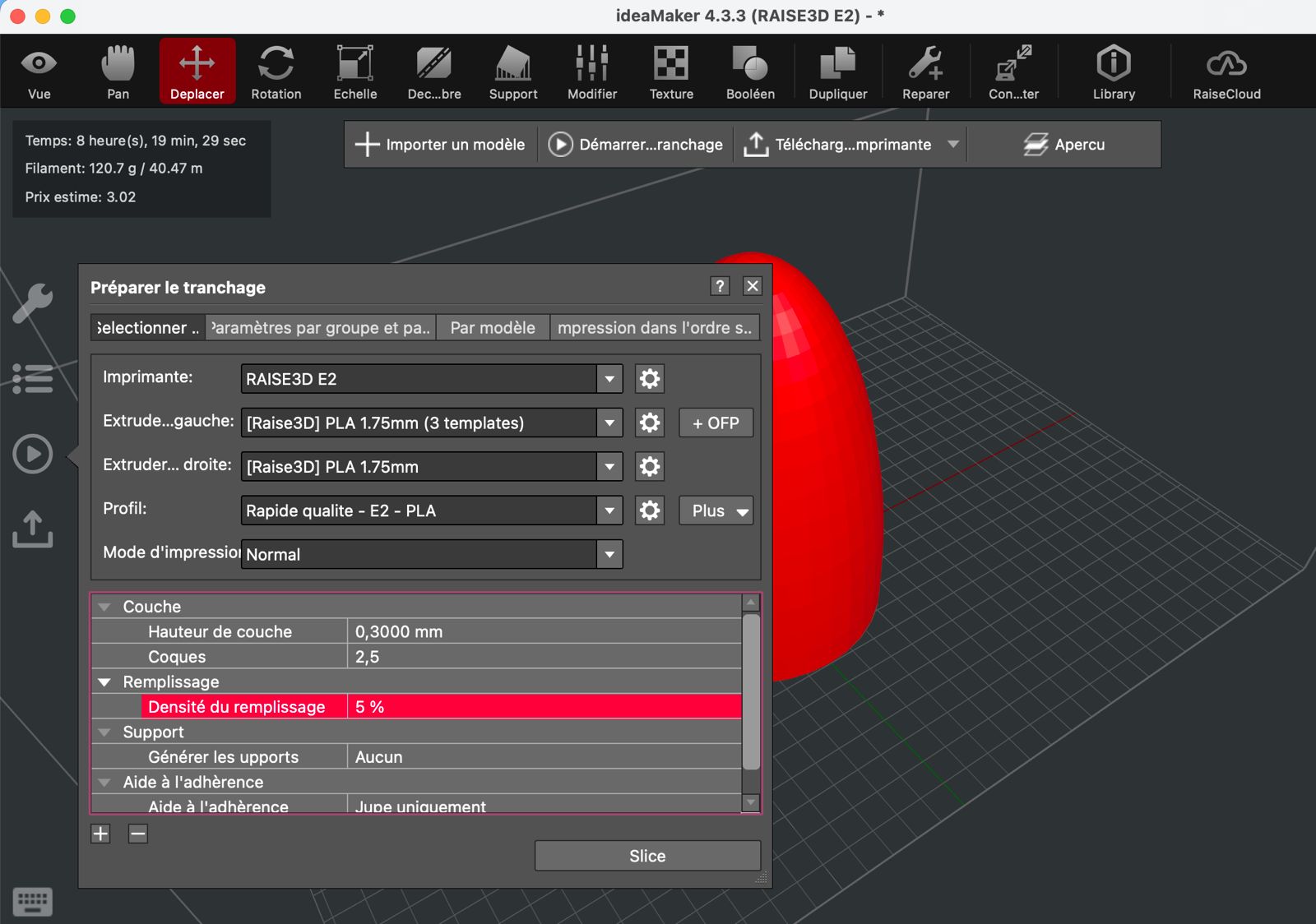
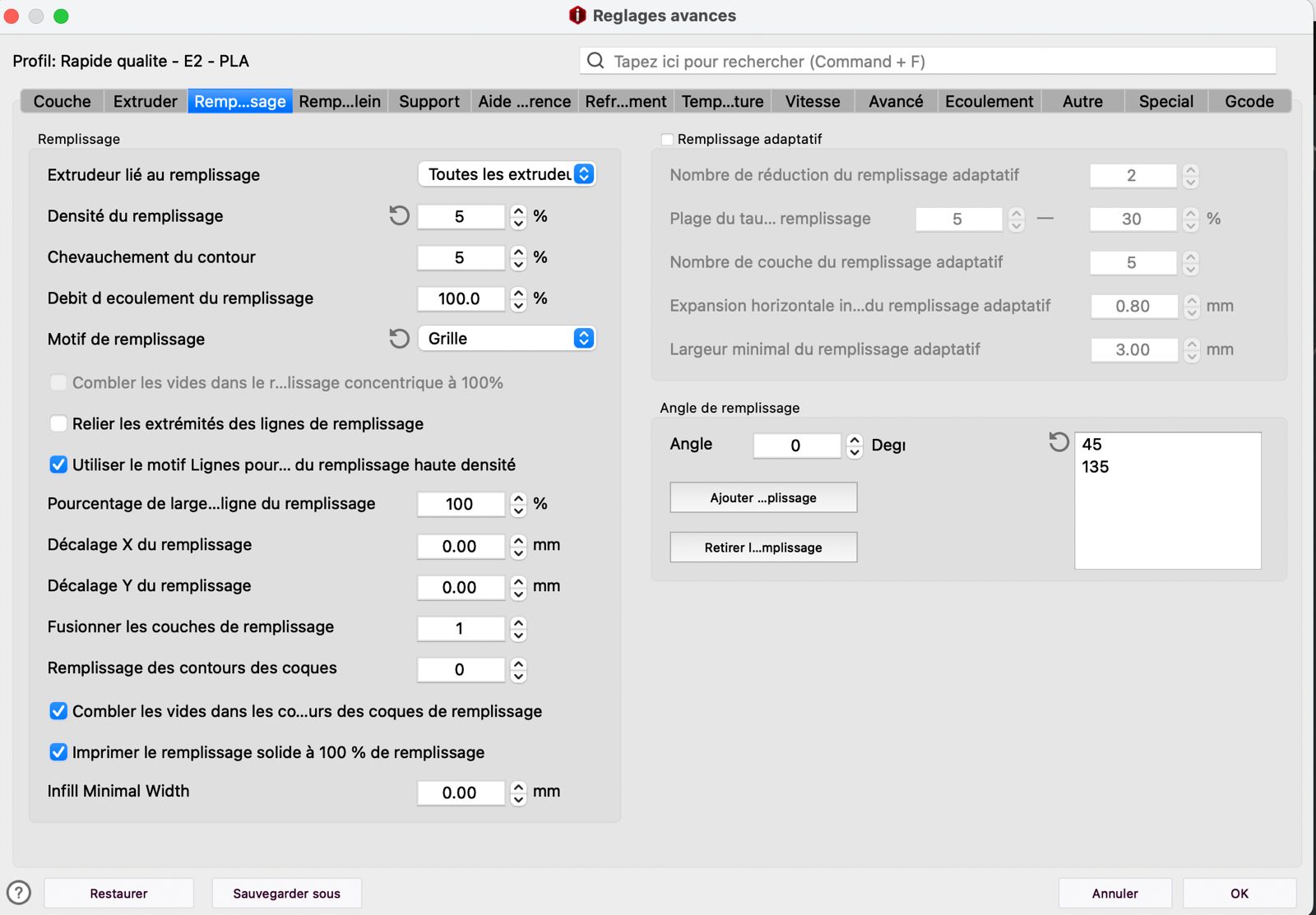
Hauteur de couche : 0,3mm
Impression intérieur : initiale --> Gyroïde vs finale --> Grille pour optimiser le temps d'impression
Densité de remplissage : 5% (faible car pas nécessaire comme on a fait un trou directement sur modélisation tikercad)
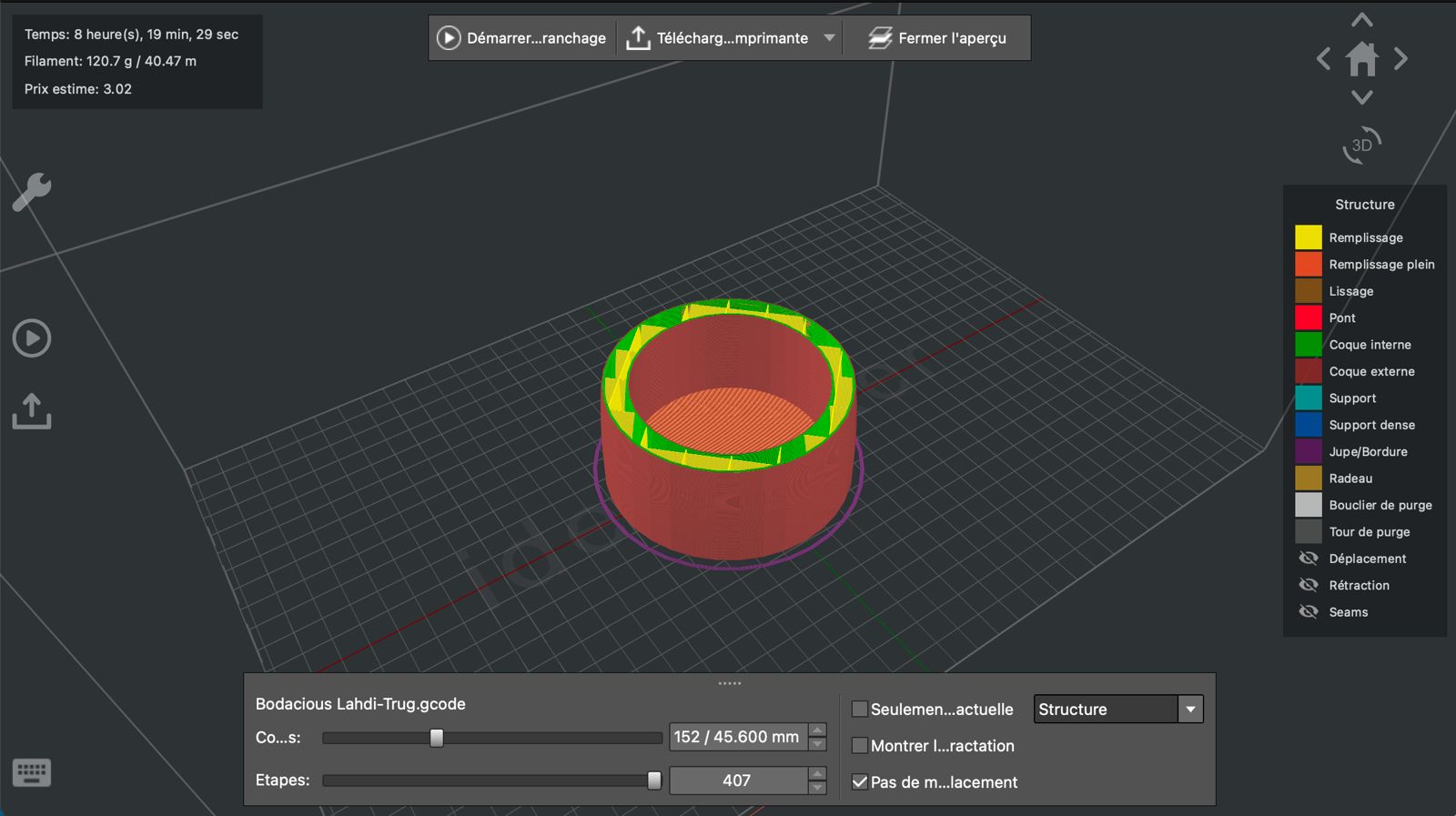
- Slice du dôme sur IDEAMAKER
-
Dôme imprimé en PLA :
-
Résultat final avec la peluche crochetée posée :
-
Gravure laser visible :
🔁 Pistes d’amélioration
-
Ajouter capteurs (obstacle, lumière)
-
Rendre le robot autonome (suivi ligne ou parcours prédéfini)
-
Contrôle via Bluetooth ou appli mobile
-
Batterie rechargeable + interrupteur ON/OFF
-
Ajout de sons / effets lumineux
📚 Sources & inspirations
-
DFRobot Wiki (moteur shield)
-
Tinkercad pour modélisation du dôme
-
Inkscape pour la gravure laser
-
Tutoriels IRremote Arduino
-
Documentation du FabLab Sorbonne