Projet final prototypage Louly Chloé Eloïse
🎯 Définition du projet
Nom du projet : Une mise en avant originale pour Louly.gurumi - Peluche mobile crochetée sur robot télécommandé
Objectif : Créer une plateforme robotique télécommandée sur laquelle on pose un animal crocheté à la main, comme une mascotte mobile. L’idée est de donner vie aux créations en crochet en les posant sur une base motorisée que l'on peut diriger à distance.
👥 Besoin & utilisateurs
Utilisateurs visés :
-
Créateurs et créatrices de crochet
-
Enfants (objet ludique)
-
Grand public (objets décoratifs vivants)
-
Ateliers pédagogiques autour de l’électronique + artisanat
Besoins identifiés :
-
Mettre en mouvement une peluche crochetée sans câblage visible
-
Base discrète et mobile
-
Plateforme réutilisable avec différents personnages
⚙️ Fonctionnalités
Fonction principale
-
Plateforme roulante contrôlée par un code arduino
Fonctionnalités secondaires
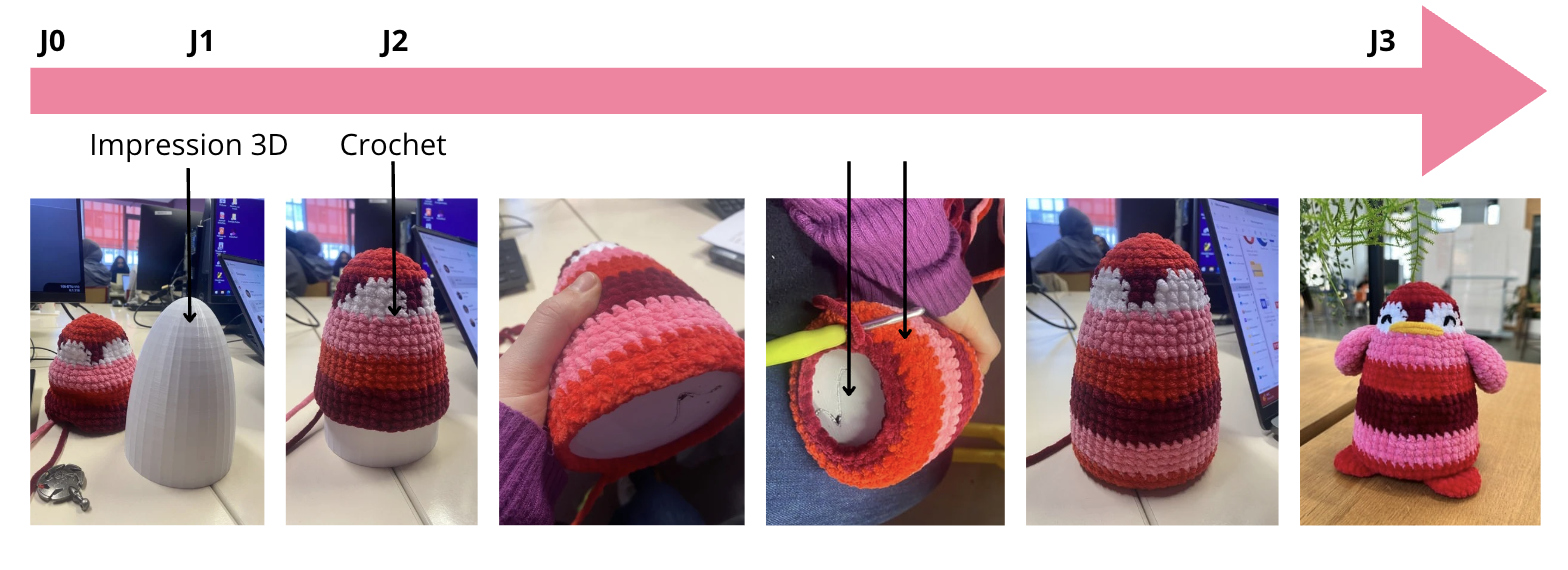
- Rembourrage de l'animal crocheté par impression 3D (dôme)
-
Plateforme stable pour fixation de l'animal en crochet par découpe laser (capôt qui recouvre l'arduino)
-
Logo (louly.gurumi + Fablab) gravés par découpe laser
- Siège et volant pour décorer la voiture
🔍 Veille & inspirations
-
Châssis Magician DG007 utilisé dans l’enseignement Arduino
-
Projets similaires de robots décorés (sumo bots, robots mascottes)
-
Personnalisation (dôme, texture, couleur, taille)
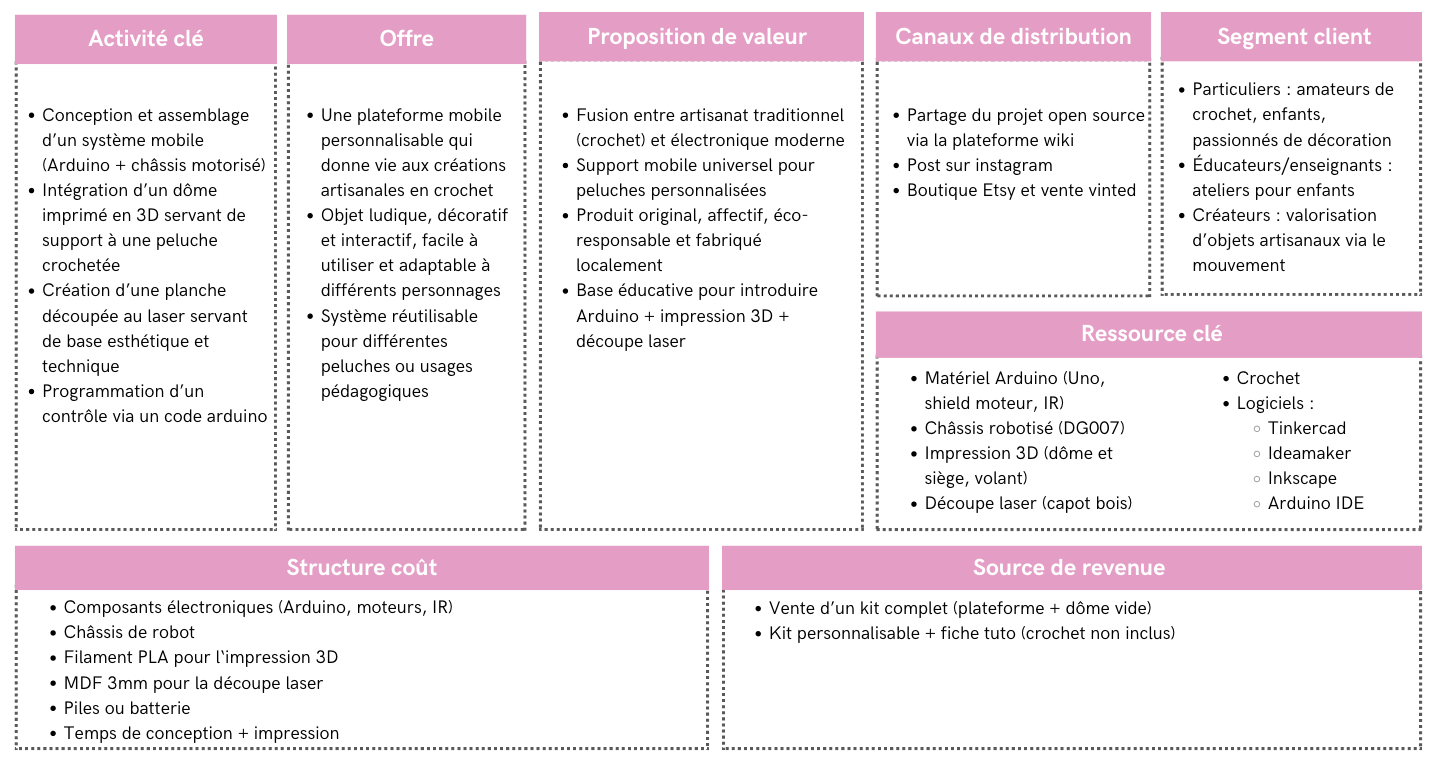
📄 Lean Canvas
🧰 Choix techniques
| Élément | Détail |
|---|---|
| Structure mobile | Châssis DG007 (2 roues motrices + une roue pour le support) |
| Électronique | Arduino Uno + shield moteur |
| Contrôle | Une fois le code arduino téléversé, la voiture est auto-pilotée grâce à la batterie. |
| Alimentation | Batterie Duracell Plus (9V) |
| Support supérieur | Planche découpée au laser (MDF 3 mm) |
| Impressions 3D |
|
| Décorations | Logo “Louly.gurumi” gravé à l'avant du capot, logo du Fablab à l'arrière |
📅 Gestion de projet
MVP (Minimum Viable Product)
-
Robot motorisé pilotable à distance
-
Dôme supportant un animal crocheté
Planning

Nous avons commencé le projet par plusieurs sessions de brainstorming pour mettre en commun nos idées et nos centres d’intérêt. C’est à ce moment-là que Louly nous a rappelé que son passe temps favoris est le crochet. Elle fabrique des animaux crochetés qu'elle propose à la vente. L'idée de notre projet est donc née : une voiture robotisée supportant une peluche crochetée by louly.gurumi !
Le projet a été validé par notre enseignant le lundi 31 mars. Ce même jour, nous avons directement commencé à concevoir le design du robot et de sa structure. Nous avons fait des croquis à la main, imaginé la forme du capot, le support pour la peluche, et commencé le montage du châssis. En parallèle, nous avons démarré la programmation sur Arduino.
Ensuite (toujours le 31 mars) nous avons modélisé un premier dôme sur Tinkercad et l’avons exporté vers IdeaMaker pour l’impression 3D. En même temps, nous avons aussi conçu la première version du capot sur Inkscape, que nous avons testée en découpe laser.
Le mardi 1er avril, nous sommes allés au FabLab pour récupérer l’impression 3D du dôme. Puis Louly a commencé à créer l’animal crocheté autour du dôme, en respectant ses dimensions. Ce même jour, nous avons poursuivi la modélisation 3D pour ajouter des éléments comme un volant et un petit siège pour rendre le support plus vivant.
Le mercredi 2 avril, nous avons fait une deuxième découpe laser du capot, après avoir revu sa forme pour l’adapter aux dimensions de la planche avec l'arduino posé sur le dessus. Nous avons aussi extrait les fichiers du siège et du volant depuis Tinkercad vers IdeaMaker pour les imprimer.
Le jeudi 3 avril, nous avons assemblé toutes les pièces : le capot, le dôme,pingouin avec le siège et le volant.dôme. Puis, nous avons fait les premiers tests complets du prototype. Nous avons ensuite lancé l'impression du siège et du dôme mais n'avons pas pu la terminer.
Finalement, le 28 avril, nous avons ajusté nos différents éléments comme suit :
- Impression 3D : n'ayant pas terminé l'impression le 3 avril, nous l'avons relancée le 28. Nous avons ensuite récupéré les pièces et les avons attachée à notre capot.
- Découpe laser : Nous avons dû redécouper notre capot en augmentant la longueur. En effet, lors de nos premiers tests, le capot était trop petit et touchait donc les roues, ce qui modifiait leur trajectoire. Nous avons donc augmenté les dimensions du rectangle de base de 0,5cm.
- Code arduino : Lors de nos premiers tests, nous avons réussi à contrôler les moteurs pour faire avancer le chassis tout droit, à l'endroit et à l'envers. Néanmoins, nous voulions une trajectoire plus évoluée, nous avons donc décidé de faire faire à la voiture un carré, à l'endroit et à l'envers. (Cf code ci-dessous)
Enfin, lesnous derniersnous jours serontsommes consacréses à la finalisation de la documentation et à la prise de photos pour illustrer le rendu final sur le wiki.
✏️ Design initial
-
Design attendu du robot + capot + peluche crochetée

Image du prototype générée par ChatGPT
-
Schéma du câblage Arduino + shield moteur + récepteur IR
- Modélisation 3D du dome sur TINKERCAD

- Extraction du dome sur IDEAMAKER et paramètres d'impression
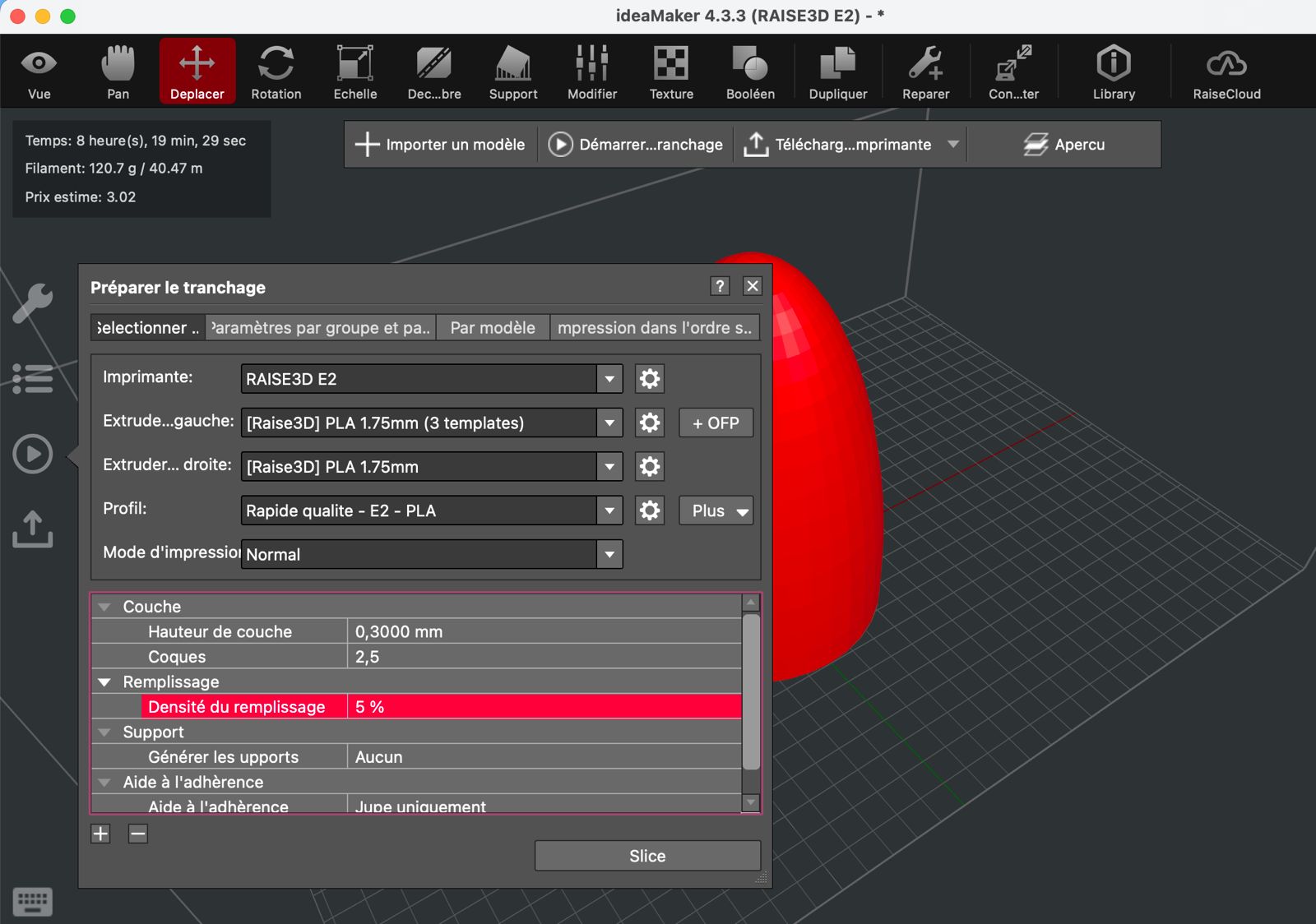
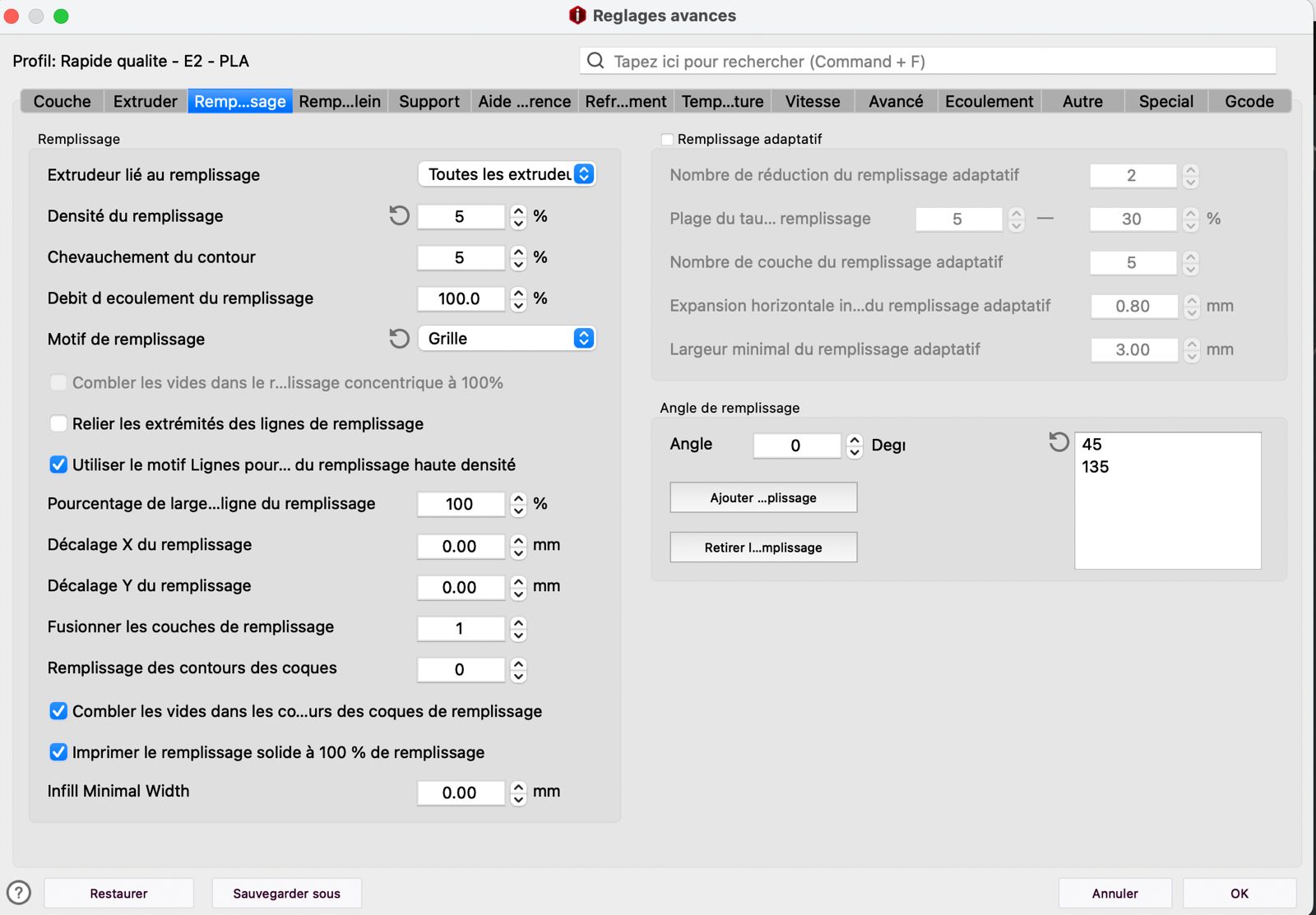
Hauteur de couche : 0,3mm
Impression intérieur : initiale --> Gyroïde vs finale --> Grille pour optimiser le temps d'impression
Densité de remplissage : 5% (faible car pas nécessaire comme on a fait un trou directement sur modélisation tikercad)
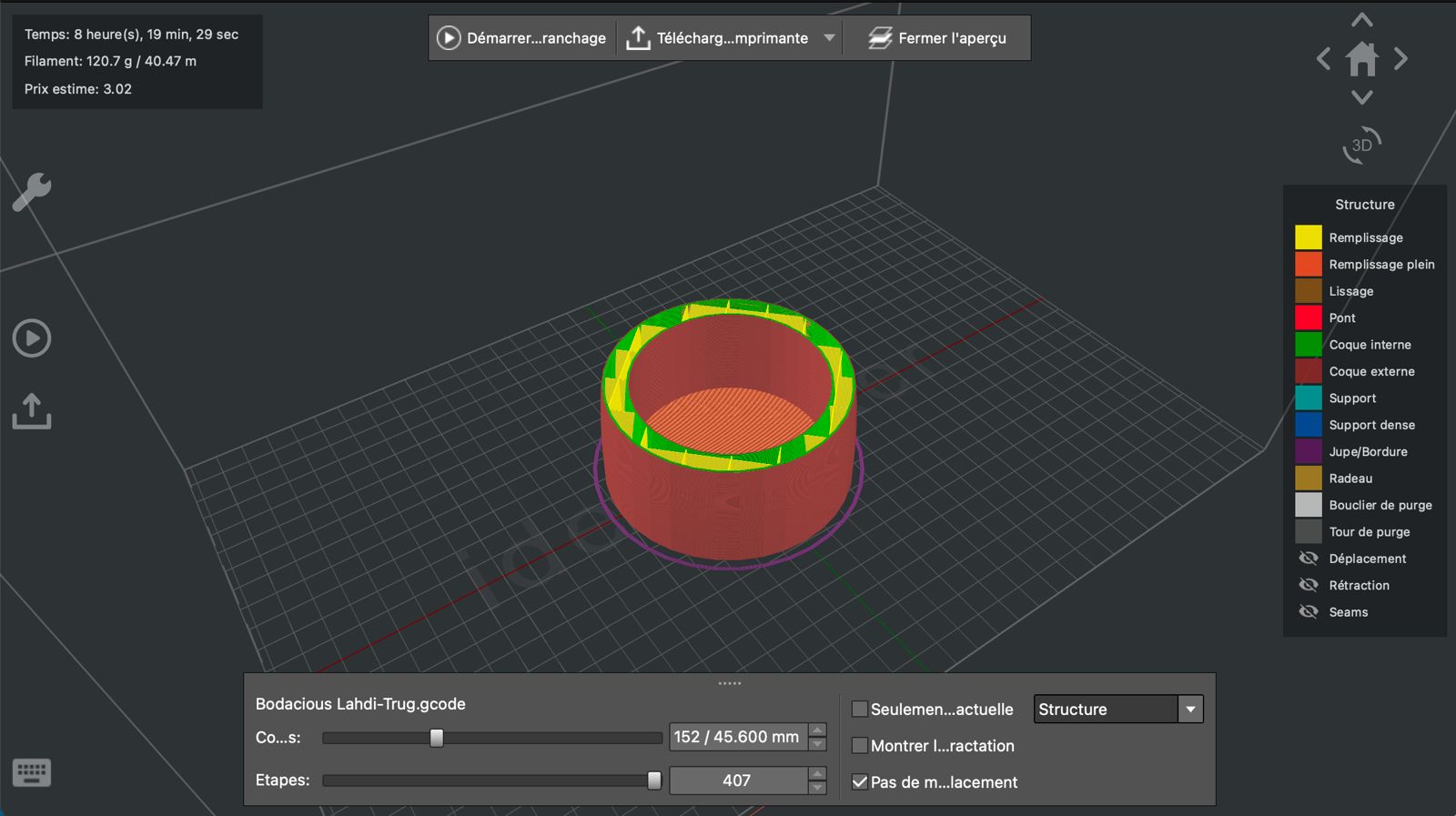
- Slice du dôme sur IDEAMAKER
🧾 Matériel utilisé
| Élément | Quantité | Remarque |
|---|---|---|
| Arduino Uno | 1 | Contrôle général |
| Shield moteur (DFRobot / L298P) | 1 | Contrôle des moteurs |
| Récepteur IR | 1 | Réception télécommande |
| Télécommande IR | 1 | Contrôle à distance |
| Chassis DG007 | 1 | Plateforme roulante |
| Moteurs DC | 2 | Déjà montés |
| Roue folle | 1 | Stabilisation |
| Batterie (6xAA) | 1 | Alimentation mobile |
| MDF 3 mm | 1 | Découpe laser (180x120 mm) |
| PLA | - | Impression 3D |
| Animal crocheté | 1 | Pingouin personnalisé |
💻 Code Arduino
#include <IRremote.h>
int RECV_PIN = 11;
IRrecv irrecv(RECV_PIN);
decode_results results;
int motor1A = 3;
int motor1B = 11;
int motor2A = 5;
int motor2B = 6;
void setup() {
Serial.begin(9600);
irrecv.enableIRIn();
pinMode(motor1A, OUTPUT);
pinMode(motor1B, OUTPUT);
pinMode(motor2A, OUTPUT);
pinMode(motor2B, OUTPUT);
}
void loop() {
if (irrecv.decode(&results)) {
long command = results.value;
if (command == 0xFFA25D) { // bouton avant
digitalWrite(motor1A, HIGH);
digitalWrite(motor1B, LOW);
digitalWrite(motor2A, HIGH);
digitalWrite(motor2B, LOW);
} else if (command == 0xFF629D) { // bouton arrière
digitalWrite(motor1A, LOW);
digitalWrite(motor1B, HIGH);
digitalWrite(motor2A, LOW);
digitalWrite(motor2B, HIGH);
} else {
digitalWrite(motor1A, LOW);
digitalWrite(motor1B, LOW);
digitalWrite(motor2A, LOW);
digitalWrite(motor2B, LOW);
}
irrecv.resume();
}
}
✅ Tests, essais & ajustements
-
Test moteurs : avec code minimal
-
Test d’adhérence du châssis + poids peluche
-
Test de portée IR
-
Ajustement forme du dôme pour stabiliser la peluche
-
Problème résolu : alimentation insuffisante au début (USB seul)
📦 Réalisation physique
-
Montage Arduino + shield + châssis
-
Impression du dôme (Tinkercad → IdeaMaker)
-
Découpe laser du capot avec dents pour imbrication
-
Gravure logo “Louly.gurumi” sur la plaque
-
Crochetage de l'animal sur le dôme
-
Pose de la peluche sur le capot
📸 Photos à intégrer
-
Montage du châssis
- Impression du capot
-
Gravure laser
- Confection de l'animal crocheté autour du dôme
🔁 Pistes d’amélioration
-
Ajouter capteurs (obstacle, lumière)
- Ajout de sons / effets lumineux
-
Rendre le robot autonome (suivi ligne ou parcours prédéfini)
-
Contrôle via bluetooth ou appli mobile
-
Batterie rechargeable + interrupteur ON/OFF
📚 Sources & inspirations
-
DFRobot Wiki (moteur shield)
-
Tinkercad pour modélisation du dôme
-
Inkscape pour la gravure laser
-
Tutoriels IRremote Arduino
-
Documentation du FabLab Sorbonne