Projet ROB3 (Diyana, Émile, Rayan, Matthieu, Pierre-Louis, Esteban)
Première séance 13/02/25 :
Nous avons terminer le remplissage des tâches de notre diagramme de Gantt.
Nous avons répartis les rôles, découvert le matériel et les fichiers fournis et explorer des solutions pour le fonctionnement général qu'aurait notre robot
Chef de projet : Esteban Peregrina
Responsable électronique : Émile Barnabé
Responsable mécanique : Diyana Saandi
Responsable informatique : Matthieu Vinet
Nous avons décidé que les tâches seraient réparties sur tous les membres de l'équipe mais que les membres ne seront pas obligatoirement limités aux tâches d'un seul pôle.
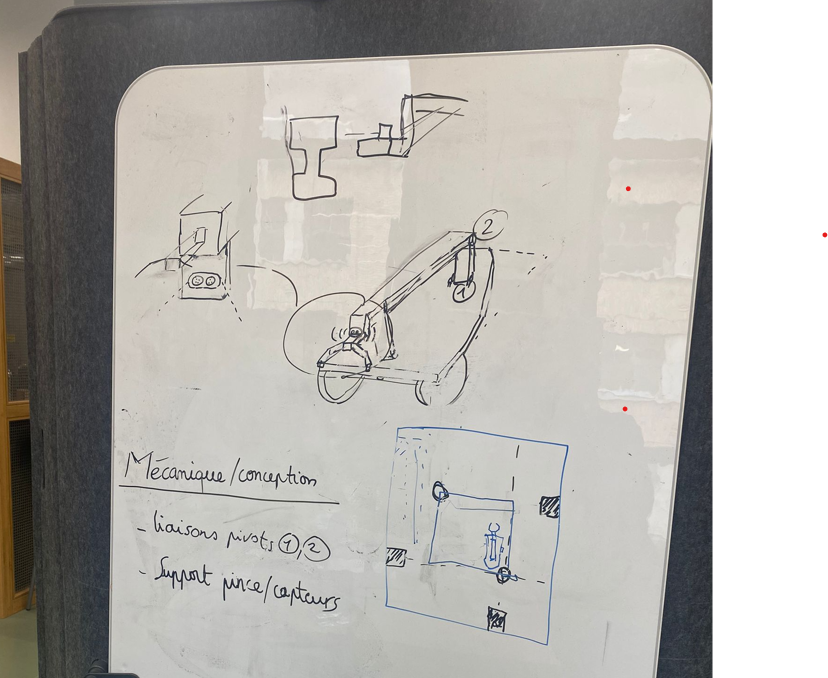
Schéma de la stratégie de conception :
Avant la prochaine séance : revenir tester le capteur pour ne pas perdre du temps sur l'écriture du code
Pour faire fonctionner le capteur (recevoir une mesure en cm), nous nous sommes fortement aider d'une documentation disponible en ligne dont l'explication est claire et réponds à toutes nos questions
Ressources : https://www.gotronic.fr/pj2-guide-us-hc-sr04-compatible-arduino-2309.pdf
Conception du bras du robot
Un des premiers problèmes rencontrés pour cette conception fût le placement des éléments sur le châssis. En effet, avec notre contrainte de garder une grande partie du bras sur le châssis <=> Placer sa base en arrière (assurant ainsi stabilité et facilitant les calculs ainsi que les déplacements) impliquait que lorsqu'il serait en position baissé, il occuperait une grande partie du châssis, environ égale à sa projection sur celui-ci. On aurait alors un châssis comportant une zone morte où l'on ne peut pas placer de composant, pas très large mais sur quasi toute sa longueur.
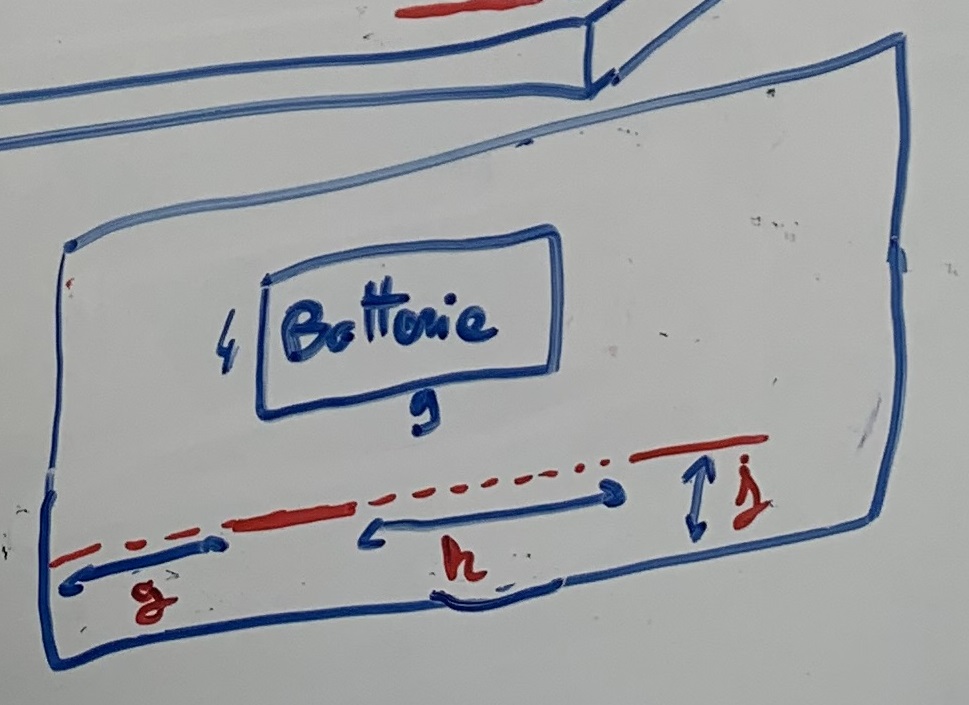
Ci-dessus : Schéma à main levée, en bleu : châssis, en rouge : zone morte
Nous nous sommes alors penchés sur ces 3 idées :
Idée 1 : Bras totalement au milieu

Idée 2 : bras articulé par 2 bielles de part et d'autre du châssis Idée 3 : Deux bielle sur une des extrémités du châssis
L'idée 2 et 3 facilitaient l'organisation des composants sur le châssis, mais pas la conception puisque la(es) liaison(s) encastrement que nous aurions dû avoir avec la partie du bras perpendiculaire aux autres (de longueur d sur l'Idée 3) était difficilement faisable au vu de la largeur du bois à notre disposition.
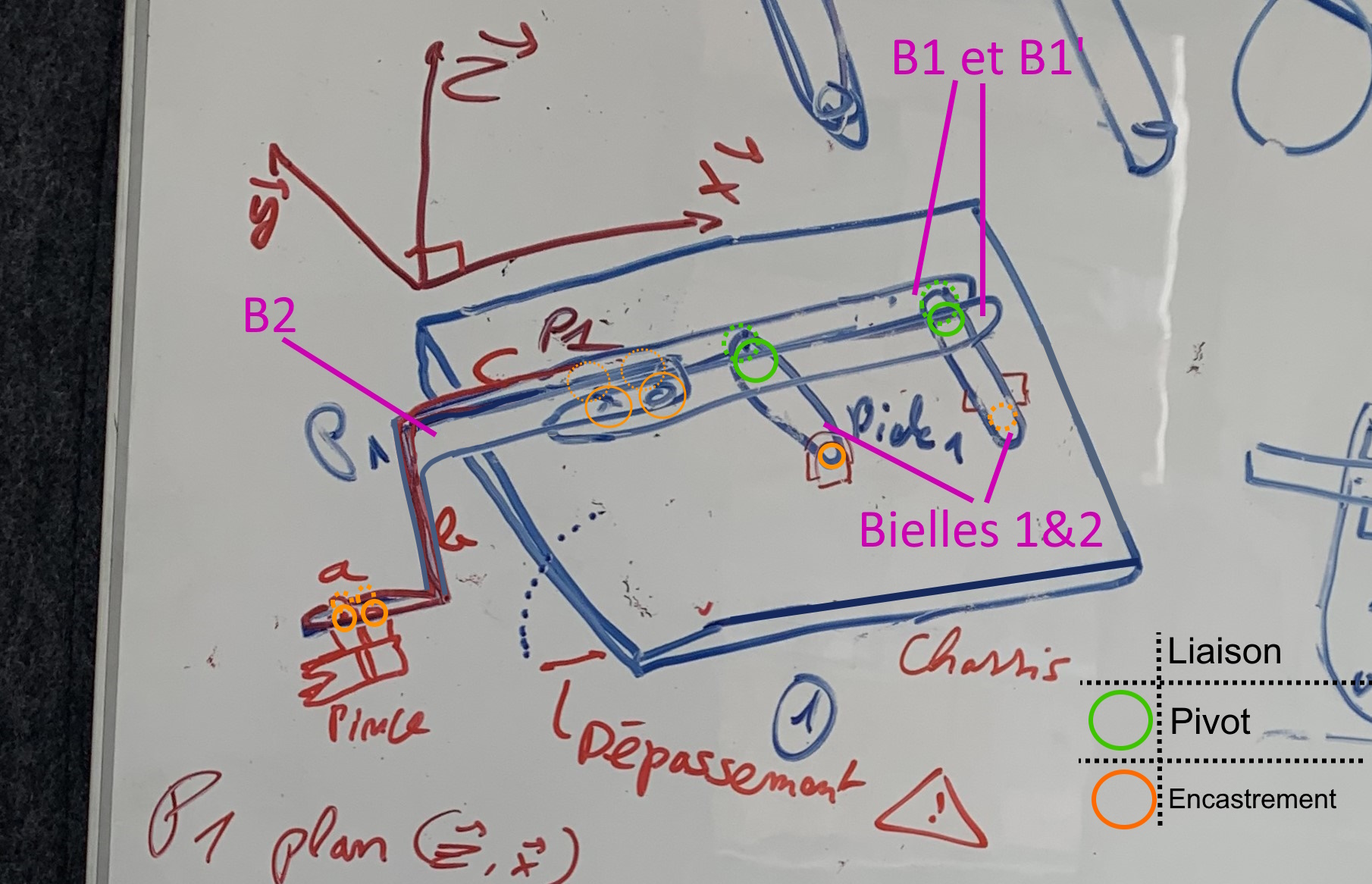
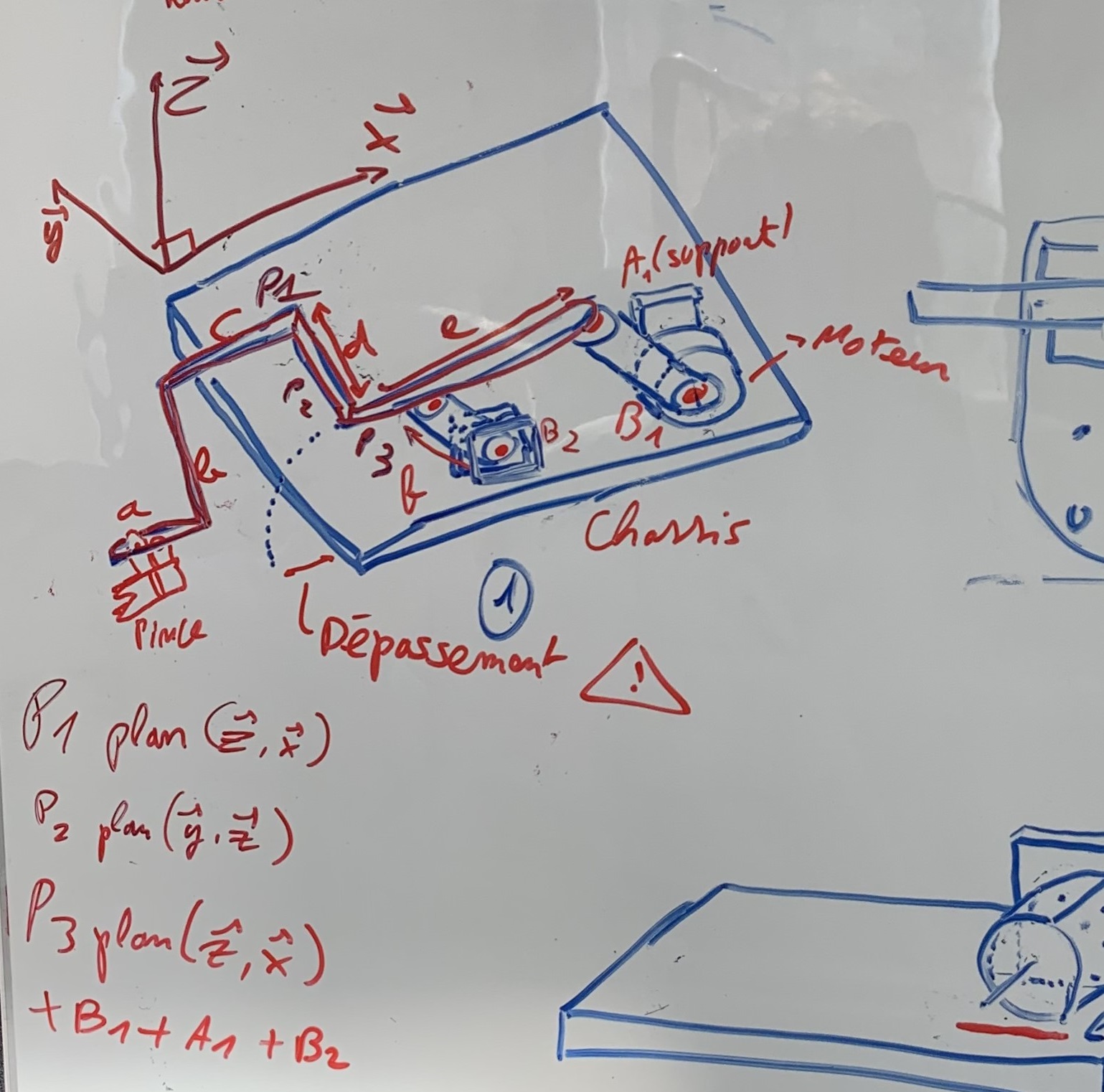
Nous nous sommes donc rabattus sur la première option : le bras et son support totalement au milieu du châssis dans la largeur. Le fait que le bras se fasse uniquement dans un seul plan facilitait largement sa conception. L'idée finale fût de mettre deux bielles alignées, emprisonnées par 2 pièces (B1, B1'), avec les moteurs pour les bielles, de côtes opposés pour une meilleure répartition du poids. Une pièce finale (B2) toujours "emprisonnée" par B1 et B1' assurerait la continuité jusqu'à la pince. Pour assurer le maintient à la pince, nous avons dû nous soumettre à ce qu'elle nous proposait : deux supports à trous pour encadrer une autre pièce, avec les deux supports espacés d'un écartement inconnu.
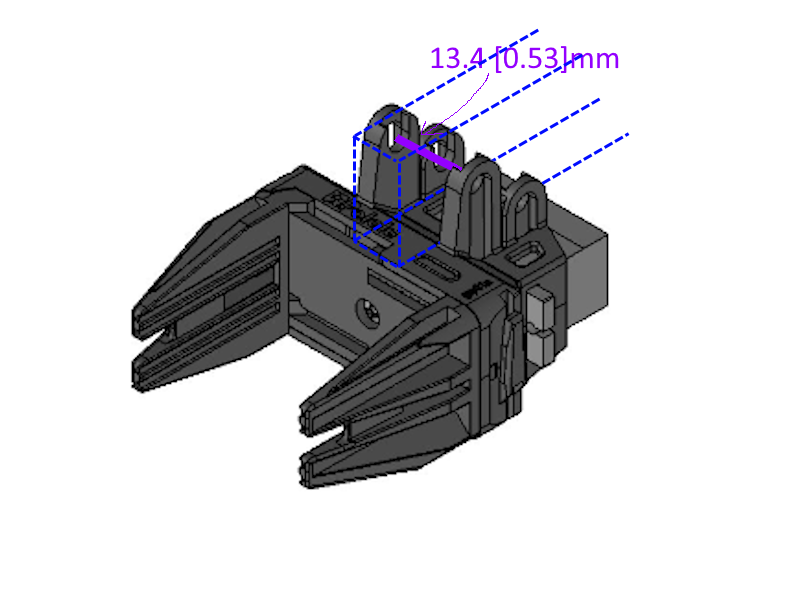
Après mesure, en sachant que nous avions à disposition du bois de 3.00 ou 6.00 mm, est 13/14 n'étant pas des multiples de 3, nous en avons convenu que notre partirions sur une pièce large de 12mm (3+6+3) et que nous rajouterions des chutes très fines de bois pour approcher les 13.5 cm.
Toutes les fixations / liaisons encastrement seront assurés par des vis.
Toutes les liaisons pivots seront assurés par des clips en plastique, imprimés en 3d et modélisés par nos soins.
Pour être sûr que le modèle de ce bras correspondait bien avec le reste de nos contraintes, j'ai dû étroitement travaillé avec Matthieu, qui était lui même en train de faire le châssis + la fixation des roues à celui-ci, pour ne pas avoir de conflits au niveau des espaces sur le châssis occupés.
Vis à vis de la pince, notre idée sur les 3 prototypes a toujours été d'avoir une pince abaissée (axe z) par rapport à notre châssis, plutôt que dans la continuité du bras, cela est dû aux contraintes techniques, en effet si la pince était à son plus bas, à hauteur de châssis, alors nous ne pourrions pas attraper les "totems".