Projet ROB3 (Diyana, Émile, Rayan, Matthieu, Pierre-Louis, Esteban)
1. Présentation et organisation
1.1. Objectif général
Dans le cadre de notre Projet ROB3, nous devons concevoir un robot autonome capable de déplacer un objet depuis une position initiale vers une position finale définie à l’intérieur d’une arène. Celui-ci, doit être constitué d’un chariot mobile de type unicycle, d’un bras à 1 DDL en parallélogramme vertical, et d’une pince montée à l’avant. Il doit pouvoir saisir l’objet donné à un emplacement précis qui sera donné par l’arbitre le jour de l’évaluation. L’objet présente une zone “amincie”, imposant alors une prise précise à notre robot.
Ces positions n’étant pas connues à l’avance, il est donc nécessaire de concevoir un robot capable de se déplacer tout en détectant son environnement afin d’ajuster sa trajectoire, d’éviter tout obstacle, cela sans aucune interaction humaine.
Ce projet mobilise alors 3 pôles complémentaires qui seront chacun piloté par différents responsables :
- Pôle mécanique : conception du châssis, du bras et gestion des différentes contraintes physiques associées → Matthieu ?
- Pôle électronique : câblage des éléments, connexions entre composants, et veiller à l’alimentation de la batterie, du bon fonctionnement des capteurs, servomoteurs, capteurs… → Rayan ?
- Pôle Informatique : développement des comportements du robot (déplacement, pince, capteurs…) → Emile ?
Ces pôles seront alors coordonnés par un responsable chargé de la planification, et l’organisation générale des différentes tâches de chacun ainsi que la cohésion des différents groupes → Esteban
Afin de permettre une collaboration efficace et équilibrée, il a été décidé que les tâches seraient réparties, selon les affinités de chacun, sur tous les membres de l'équipe, sans limiter obligatoirement les membres à un seul pôle.
2. Journal de bord
2.1 Séance 1
- 13/02/25 -
Dans cette première séance d'introduction, nous avons commencé par découvrir les attendus du projet, le matériel fourni ainsi que les fichiers et documentations disponibles sur le Wiki. Suite à nos premiers échanges, nous avons pu convenir d'un premier modèle de conception pour notre machine, permettant alors de poser les bases de notre organisation et de définir les tâches à répartir pour chaque pôle dans notre diagramme de Gantt.
Nous avons ainsi abouti à un schéma général de notre stratégie de conception :
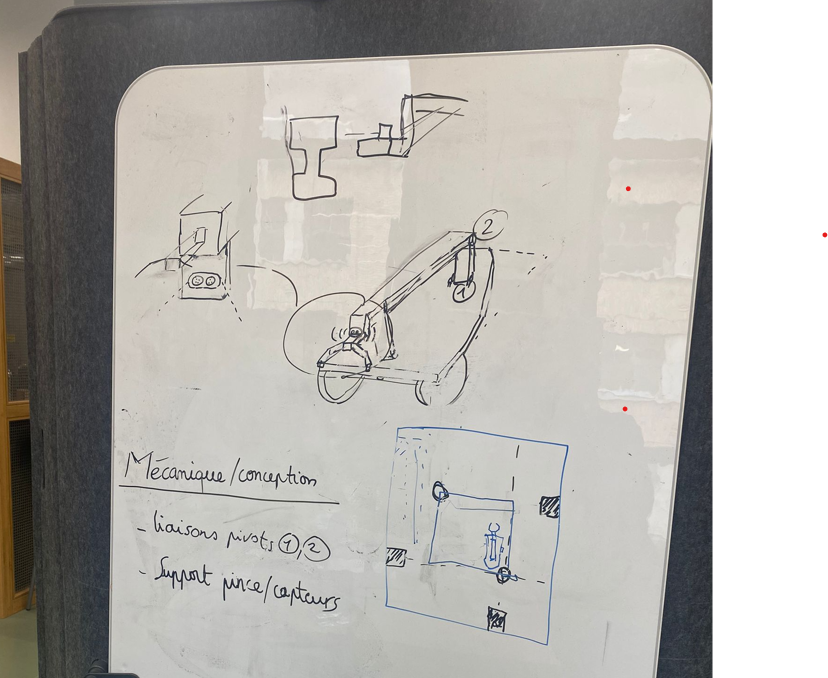
L’agencement global du robot a été pensé en représentant notre châssis et les différents éléments répartis. Le bras est défini sur tout le châssis. Il est alors articulé selon 2 liaisons pivots (1, 2 sur le schéma) afin permettre le mouvement vertical tout en conservant la forme de parallélogramme imposée.
Nous avons également décidé de la position des capteurs : un à l’avant au niveau de la pince pour détecter l’objet en face du robot, et un second capteur sur le côté droit pour permettre un suivi du mur lors des déplacements.
En parallèle, nous avons entamé les premiers tests techniques, en nous concentrant sur les capteur à ultrasons. L’objectif est de confirmer leurs comportements afin de préparer leur intégrations dans le code principal. Pour obtenir une mesure fiable en centimètres de la part du capteur, une documentation en ligne particulièrement claire et complète, a permis de répondre à toutes nos questions.
Ressources : https://www.gotronic.fr/pj2-guide-us-hc-sr04-compatible-arduino-2309.pdf
2.2 SéancePôle 2mécanique
- 06/03/25 -
2.2.1 Conception du bras du robot :
Un des premiers problèmes rencontrés pour cette conception fûta été lié au le placement des éléments sur le châssis. En effet, avecil notrea fallut respecter la contrainte de garder une grande partie du bras sur le châssisssis. <=>Nous Placeravons donc déterminé que placer sa base en arrière (assurantpermettait ainsid'assurer une meilleure stabilité, et facilitantfaciliter les calculs ainside quebras de levier et d'optimiser les déplacements)placements. impliquaitCependant, quecette lorsqu'ilconfiguration seraitimplique qu'en position basse, ille bras occuperait une grande partie du châssis, environ égale à sa projection sur celui-ci. On aurait alors unune zone s'étendant sur quasi toute la longueur du châssis comportant unedite zone morte où l'oncomposant ne peut pasêtre placer de composant, pas très large mais sur quasi toute sa longueur.placé.
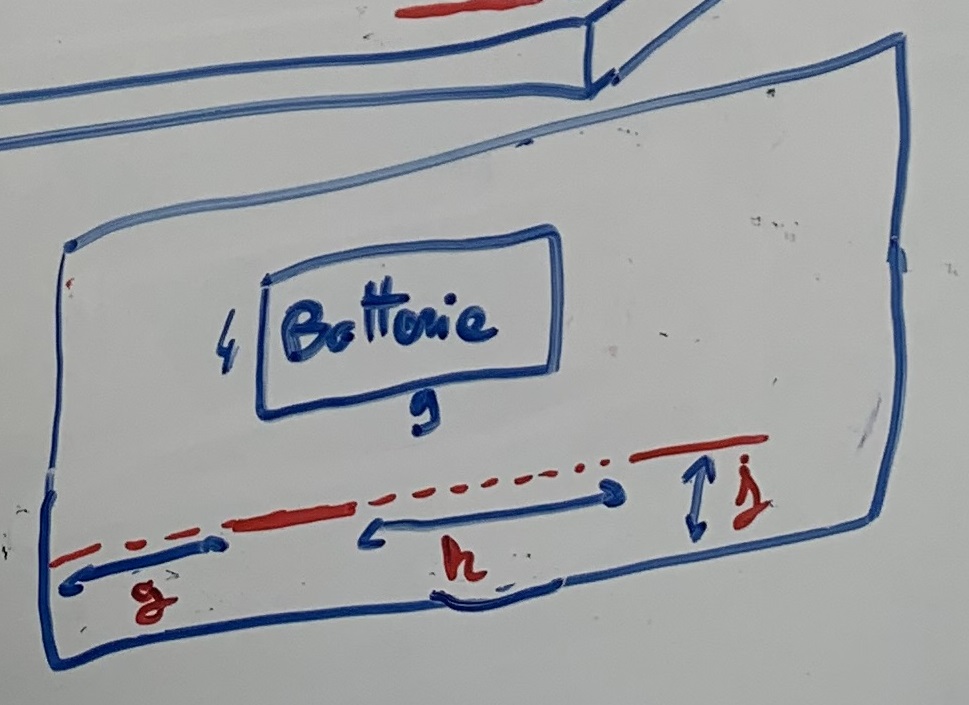
Ci-dessus : Schéma à main levée, en bleu : châssis, en rouge : zone morte
NousAfin de contourner cette contrainte, nous sommesavons alorspensé penchés sur cesà 3 idées différentes pour l'implantation du bras :
- Idée1 : Placer le bras au centre du châssis
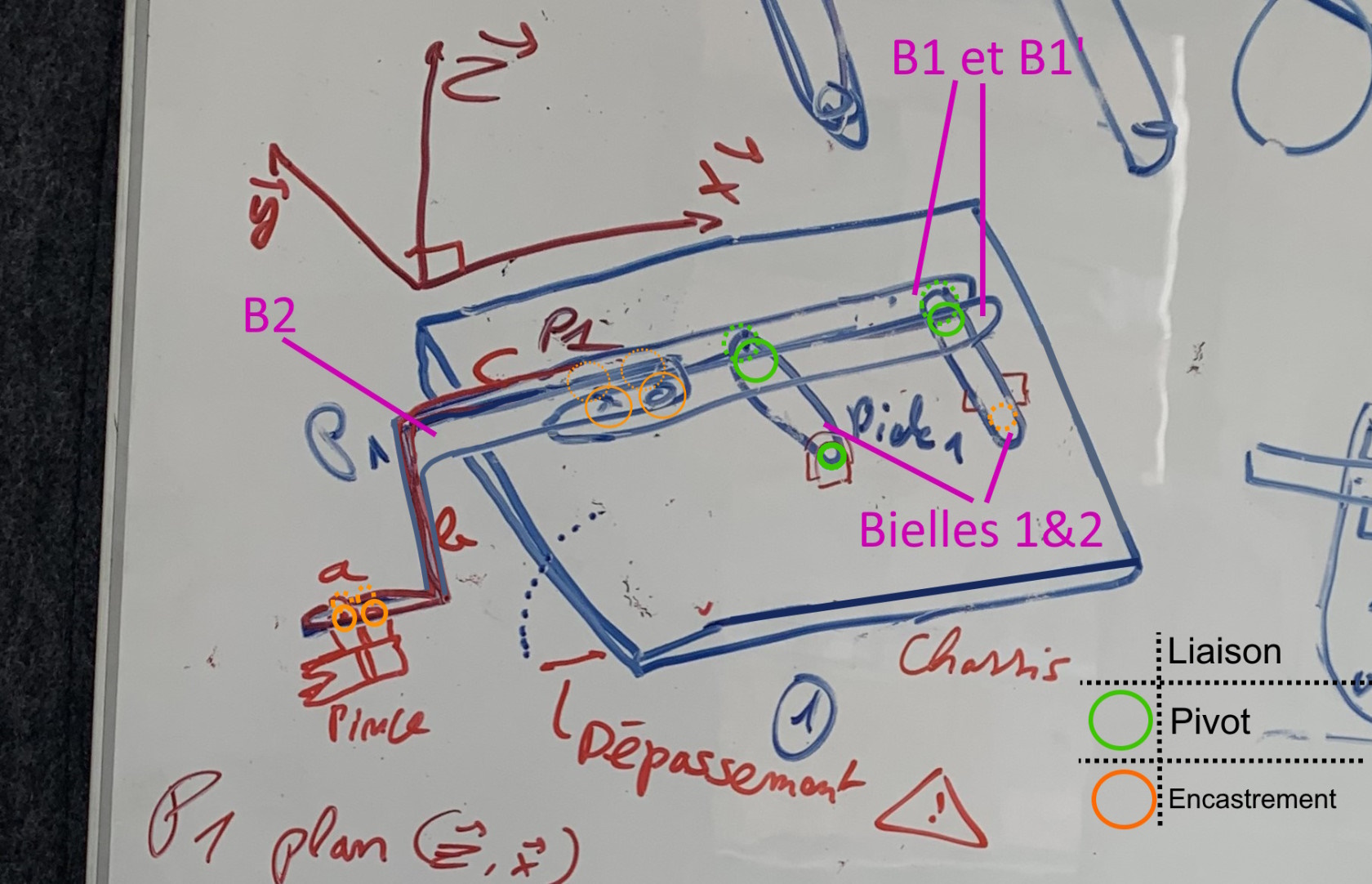
Idéeest 1composé :de Bras2 totalementbielles montées sur des liaisons pivots, connectées à deux pièces latérales (B1 et B1') fixées au milieuchâssis par encastrement. La pièce B2 assure la continuité vers l’avant jusqu’à la pince.

- Idée 2 :
brasBras articuléparvia 2 bielles de part et d'autre du châssis
Les bielles B1 et B2 montées sur pivots, sont chacune reliées à un support moteur : A1 à droite et A2 à gauche. Les moteurs seraient ainsi été installés sur deux supports indépendants, chacun positionné de part et d’autre du châssis et relié directement vers la bielle associée.
- Idée 3 :
DeuxPositionnerbielle2 bielles sur une des extrémités du châssis
La pièce B1 agit comme bielle motrice, montée sur le support A1. La bielle B2, située juste à côté, complète le montage parallélogramme en se reliant à l’extrémité de l'élément e qui prolonge le bras vers l’avant.
L'Avantages & Inconvénients :
Les idéees 2 et 3 facilitaient l'organisation des composants sur le châssis,ssis maislaissant pasplus d'espace pour l'intégration d'autres composants. Cependant, elles se révèlent plus complexes pour la conception puisque la(es) liaison(s) encastrementencastrement(s) quenécessaires nouspour aurionsfixer dû avoir avecsolidement la partie du bras perpendiculaire aux autres (de longueur d sur l'Idéidée 3) aux autres étaitléments étaient difficilement faisableréalisables aucompte vutenu de la largeur dulimitée de bois àdisponible.
Résultat disposition.final :
Nous nous sommes donc rabattus sur une dérivée de la première option : le2 brasbielles sont alignés et sonemprisonnées support totalementchacune au milieuchassis différemment. La bielle avant agit comme une bielle motrice : elle est vissée à un moteur par deux vis assurant la transmission du mouvement. Ce moteur est lui-même fixé au chassis grâce une pièce support, positionnée par un système de cales ajustées. Ce montage serré avec le châssis danspermet une bonne stabilité et évite les mouvements de rotations nos désirés.
La bielle arrière est quant à elle directement maintenu entre deux pièces supports de par et d'autre de la largeur.bielle, et fixée par une vis transversale. De la même manière, ces supports sont fermement maintenus au châssis par montage serré à l'aide de cales assurant une stabilité sans jeu. Le faitmouvement quede lepivot est permis de grâce à l'espace libre entre les support qui permet à la bielle de tourner autour de son axe.
Le dernier élément du bras sequi fassesupporte uniquementla danspince un seul plan facilitait largement sa conception. L'idée finale fûtest de mettreforme arquée et est relie latéralement aux extrémités des deux bielles alignées, emprisonnées par 2 piècesvis (B1,transversales. B1'), avec les moteurs pour les bielles, de côtes opposés pour une meilleure répartition du poids. UneCette pièce finalepermet (B2)de toujoursmaintenir "emprisonnée"une pardistance B1fixe etentre B1'les assureraitbielles lamême continuitéen jusqu'àl'absence lade pince.parallélogramme. Pour assurer le maintient à la pince, nous avons dû nous soumettre à ce qu'elle nous proposait : deux supports à trous pour encadrer une autre pièce, avec les deux supports espacés d'un écartement inconnu.
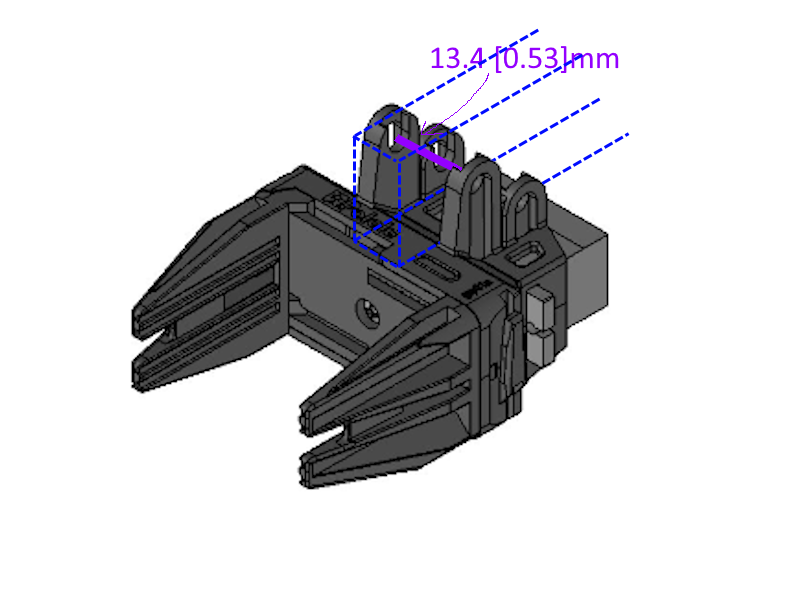
Après mesure, en sachant que nous avions à disposition du bois de 3.00 ou 6.00 mm, est 13/14 n'étant pas des multiples de 3, nous en avons convenu que notre partirions sur une pièce large de 12mm (3+6+3) et que nous rajouterions des chutes très fines de bois pour approcher les 13.5 cm.
Toutes les fixations / liaisons encastrement seront assurés par des vis.
Toutes les liaisons pivots seront assurés par des clips en plastique, imprimés en 3d et modélisés par nos soins.
Pour être sûr que le modèle de ce bras correspondait bien avec le reste de nos contraintes, j'ai dû étroitement travaillé avec Matthieu, qui était lui même en train de faire le châssis + la fixation des roues à celui-ci, pour ne pas avoir de conflits au niveau des espaces sur le châssis occupés.
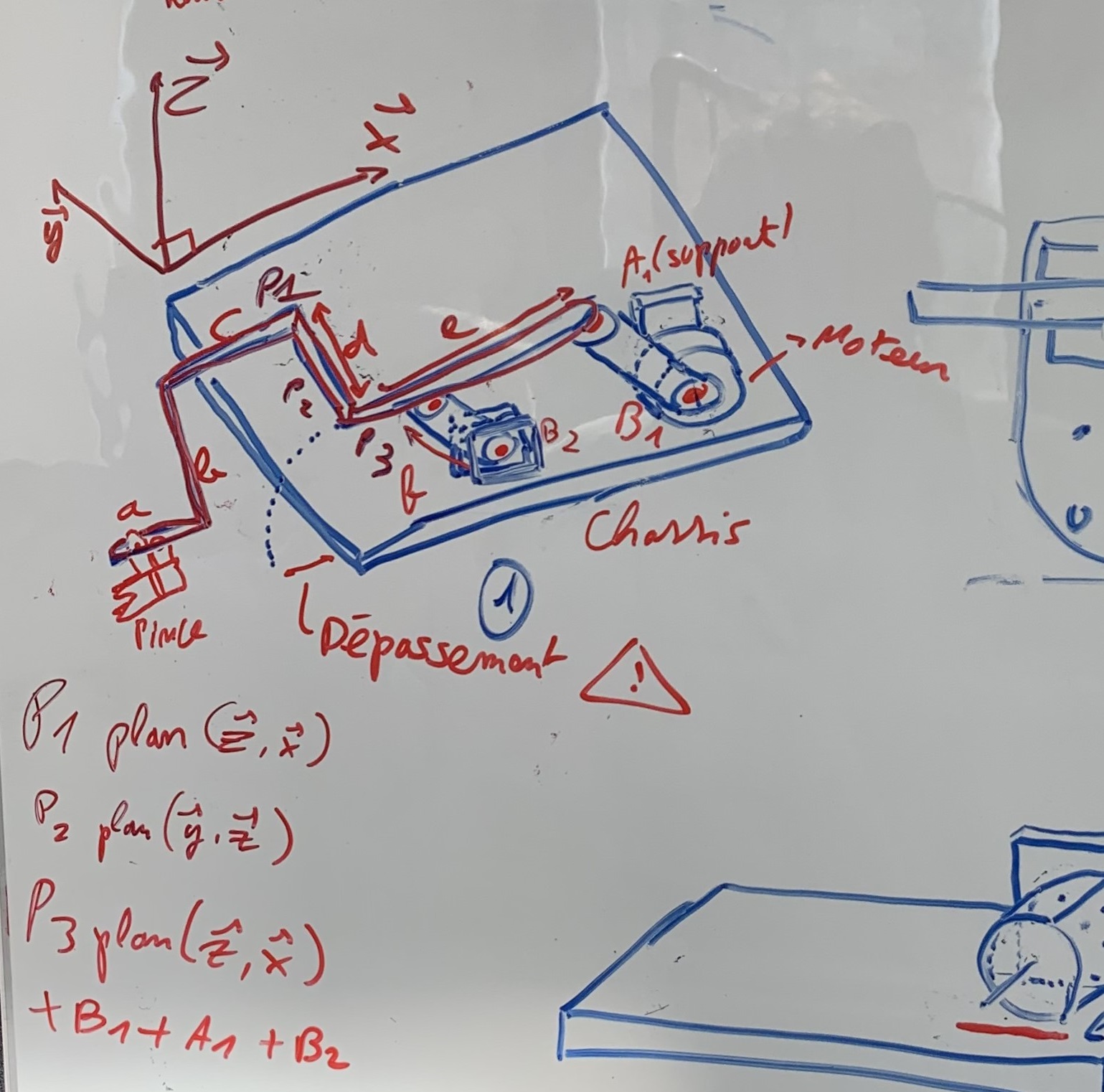
Vis à vis de la pince, notre idée sur les 3 prototypes a toujours été d'avoir une pince abaissée (axe z) par rapport à notre châssis, plutôt que dans la continuité du bras, cela est dû aux contraintes techniques, en effet si la pince était à son plus bas, à hauteur de châssis, alors nous ne pourrions pas attraper les "totems".
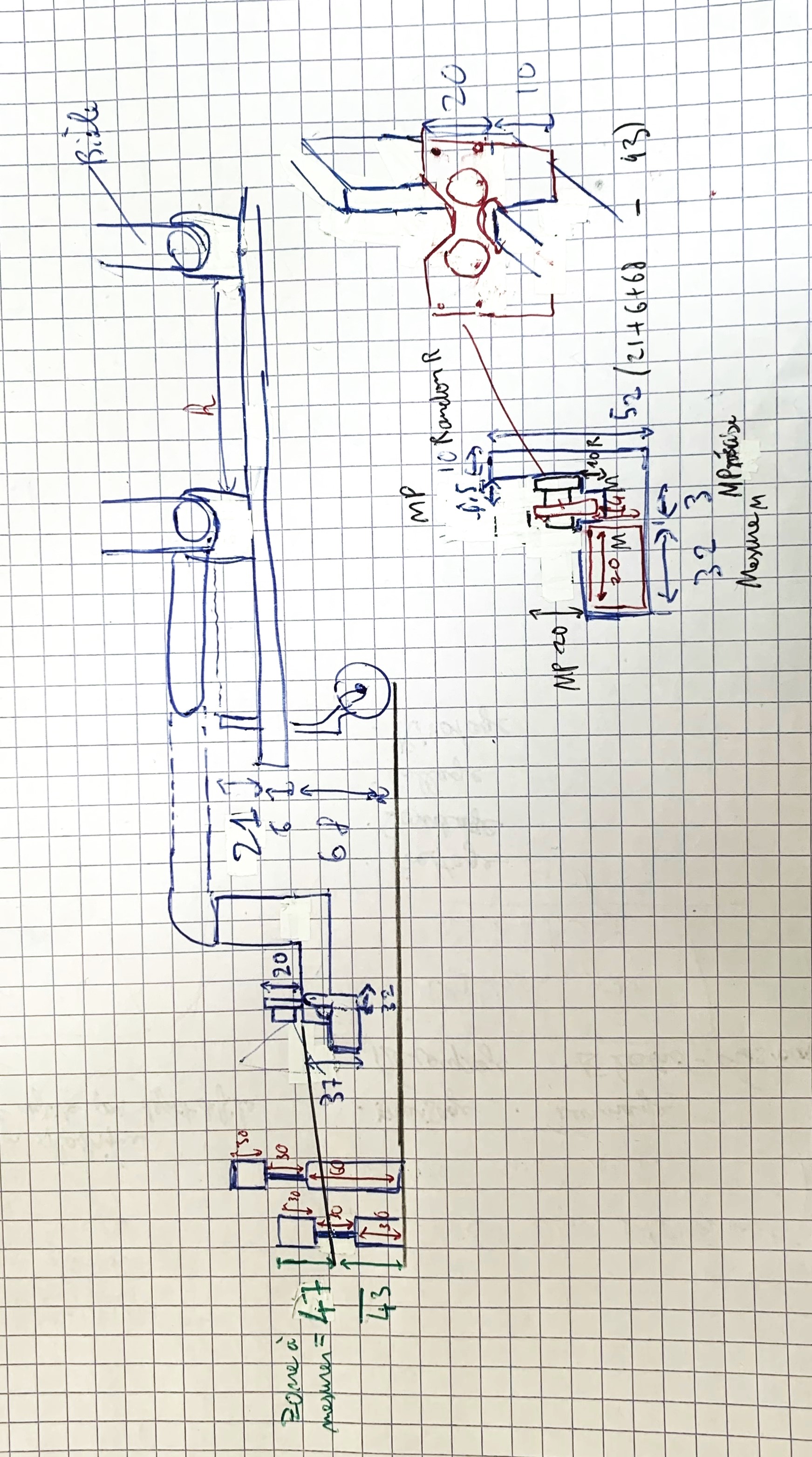
Schéma du bras avec les mesures et la solution pour maintenir le capteur IR
2.2.2 Conception du châssis
trou cale, calcul, mesures choisi, scotch pour que ça adhère mieux car trop flottant ,élastique, bras arrivait pas à monter
2.2.3 Support pince / capteurs
2.2.4 Fixation des roues
2.2.5 Assemblage mécanique final (photo)
2.2 Pôle électronique
-20/03/2025 -
Après plusieurs séances consacrées aux tests des composants, à la recherche et la consultation des documents techniques des éléments fournis, nous avons pu établir une documentation claire et structurée des branchements de l'ensemble des éléments électroniques. Le but est d'anticiper les connexions à réaliser avec la CAN BUS Shield. Cette doc garantie une compréhension commune des branchements à effectuer pour tous les membres du groupe.
Documentation branchements
Composants :
→ pin quelconque : à adapter selon le code
Pince 3551 avec servomoteur intégré :
Branchements avec CAN BUS SHIELD :
- Fil noir = masse → GND du CAN BUS
- Fil rouge = puissance du servo (Vservo, borne positive) → Vin du CAN BUS
- Fil blanc = signal d’asservissement du servomoteur, commande → pin quelconque
- (Fil vert = Potentiomètre = lire l'angle position du moteur, nécessaire pour réguler la commande → pin quelconque)
Capteurs de distance à ultrasons HC-SR04 :
Branchements avec CAN BUS SHIELD
Pour les 2 capteurs :
- Fil rouge → Vcc = + 5V
- Fil bleu → trig = Émission des ultrasons, on lance la mesure → pin quelconque
- Fil vert → echo = Renvoie la durée du retour de l'écho, calcul la distance → pin quelconque
- Fil noir → GND = masse de l’alimentation
Moteurs KTECH MS4015-V3 :
Branchements avec batterie et CAN BUS SHIELD (I = 0.06A si alimentation)
Pour les 3 moteurs :
- 2 fils rouges liés → + 12V pince croco / borne +
- 2 fils noirs → masse (un nécessaire) pince croco / borne -
- Fil bleu H → borne CAN H du CAN BUS
- Fil jaune L → borne CAN L du CAN BUS
Soudure à réaliser :
- 2 fils rouges capteurs ultrasons + un fil rouge pince servo moteur → + 5V CAN
- 2 fils GND capteurs ultrasons → GND CAN