Projet ROB3 (Diyana, Émile, Rayan, Matthieu, Pierre-Louis, Esteban)
1. PréPrésentation et organisation
1.1. Objectif génégénéral
Dans le cadre de notre Projet ROB3, nous devons concevoir un robot autonome capable de dédéplacer un objet depuis une position initiale vers une position finale dédéfinie àà l’intél’intérieur d’d’une arèarène. Celui-ci, doit êêtre constituéconstitué d’d’un chariot mobile de type unicycle, d’d’un bras àà 1 DDL en paralléparallélogramme vertical, et d’d’une pince montémontée àà l’l’avant. Il doit pouvoir saisir l’l’objet donnédonné àà un emplacement préprécis qui sera donnédonné par l’l’arbitre le jour de l’él’évaluation. L’L’objet préprésente une zone “amincie”“amincie”, imposant alors une prise préprécise àà notre robot.
Ces positions n’én’étant pas connues àà l’l’avance, il est donc nénécessaire de concevoir un robot capable de se dédéplacer tout en dédétectant son environnement afin d’d’ajuster sa trajectoire, d’éd’éviter tout obstacle, sans aucune interaction humaine.
Ce projet mobilise alors 3 pôpôles complécomplémentaires qui seront chacun pilotépilotés par diffédifférents responsables :
PôPôlemémécanique : conception duchâchâssis, du bras et gestion desdiffédifférentes contraintes physiquesassociéassociées→→ MatthieuPôPôleéélectronique :câcâblage desélééléments, connexions entre composants, et veillerààl’l’alimentation de la batterie, du bon fonctionnement des capteurs, servomoteurs,capteurs…capteurs…→→ RayanPôPôle Informatique :dédéveloppement des comportements du robot (dédéplacement, pince,capteurs…capteurs…)→→ Pierre-Louis
Ces pôpôles seront alors coordonnécoordonnés par un responsable chargéchargé de la planification, et l’l’organisation génégénérale des diffédifférentes tâtâches de chacun ainsi que la cohécohésion des diffédifférents groupes →→ Esteban
Afin de permettre une collaboration efficace et équilibrééquilibrée, il a étéété décidédécidé que les tâtâches seraient réréparties selon les affinitéaffinités de chacun, sur tous les membres de l'ééquipe, sans limiter obligatoirement les membres àà un seul pôpôle.
2. RéRéalisation
2.1 SéSéance 1 : Introduction
- 13/02/25 -
Dans cette premièpremière séséance d'introduction, nous avons commencécommencé par dédécouvrir les attendus du projet, le matématériel fourni ainsi que les fichiers et documentations disponibles sur le Wiki. Suite àà nos premiers ééchanges, nous avons pu convenir d'un premier modèmodèle de conception pour notre machine, permettant alors de poser les bases de notre organisation et de dédéfinir les tâtâches àà rérépartir pour chaque pôpôle dans notre diagramme de Gantt.
Nous avons ainsi abouti àà un schéschéma génégénéral de notre stratéstratégie de conception :
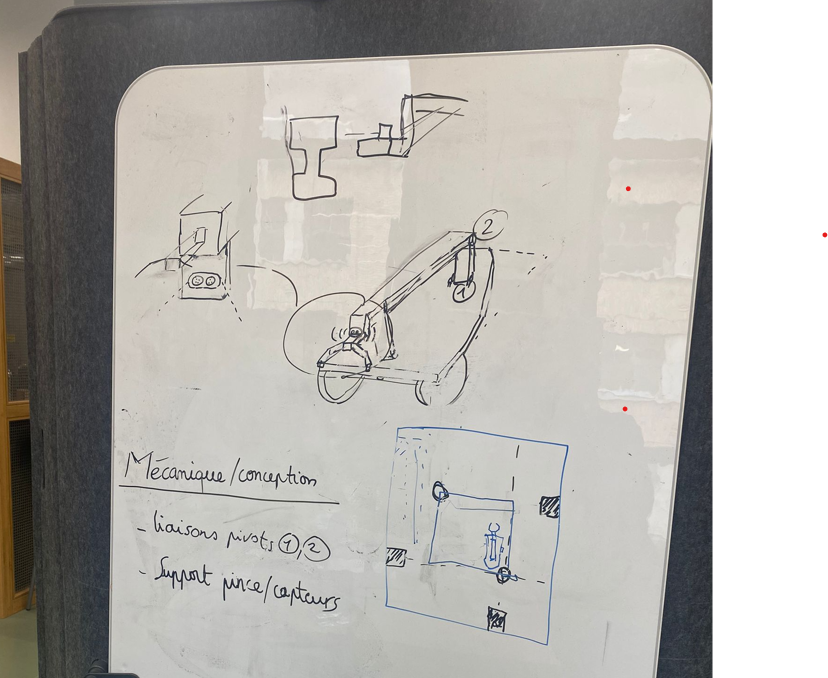
L’L’agencement global du robot a étéété pensépensé en repréreprésentant notre châchâssis et les diffédifférents élééléments rérépartis. Le bras est dédéfini sur tout le châchâssis. Il est alors articuléarticulé selon 2 liaisons pivots (1, 2 sur le schéschéma) afin permettre le mouvement vertical tout en conservant la forme de paralléparallélogramme imposéimposée.
Nous avons éégalement décidédécidé de la position des capteurs : un àà l’l’avant au niveau de la pince pour dédétecter l’l’objet en face du robot, et un second capteur sur le côtécôté droit pour permettre un suivi du mur lors des dédéplacements.
En parallèparallèle, nous avons entaméentamé les premiers tests techniques, en nous concentrant sur les capteur àà ultrasons. L’L’objectif est de confirmer leurs comportements afin de prépréparer leur intéintégration dans le code principal. Pour obtenir une mesure fiable en centimècentimètres de la part du capteur, une documentation en ligne particulièparticulièrement claire et complècomplète, a permis de rérépondre àà toutes nos questions.
Ressources : https://www.gotronic.fr/pj2-guide-us-hc-sr04-compatible-arduino-2309.pdf
2.2 PôPôle mémécanique
- 06/03/25 -
2.2.1 Conception du bras du robot :
a) Choix de l'architecture
Un des premiers problèproblèmes rencontrérencontrés pour cette conception a étéété liélié au placement des élééléments sur le châchâssis. En effet, il a fallu respecter la contrainte de garder une grande partie du bras sur le châchâssis. Nous avons donc déterminédéterminé que placer sa base en arrièarrière permettait d'assurer une meilleure stabilitéstabilité, faciliter les calculs de bras de levier et d'optimiser les dédéplacements. Cependant, cette configuration implique qu'en position basse, le bras occuperait une grande partie du châchâssis, environ éégale àà sa projection sur celui-ci. On aurait alors une zone s'éétendant sur quasi toute la longueur du châchâssis dite zone morte oùoù aucun composant ne peut êêtre placéplacé.
SchéSchéma àà main levélevée, en bleu : châchâssis, en rouge : zone morte
Afin de contourner cette contrainte, nous avons pensépensé àà 3 idéidées diffédifférentes pour l'implantation du bras :
IdéIdée 1 : Placer le bras au centre duchâchâssis
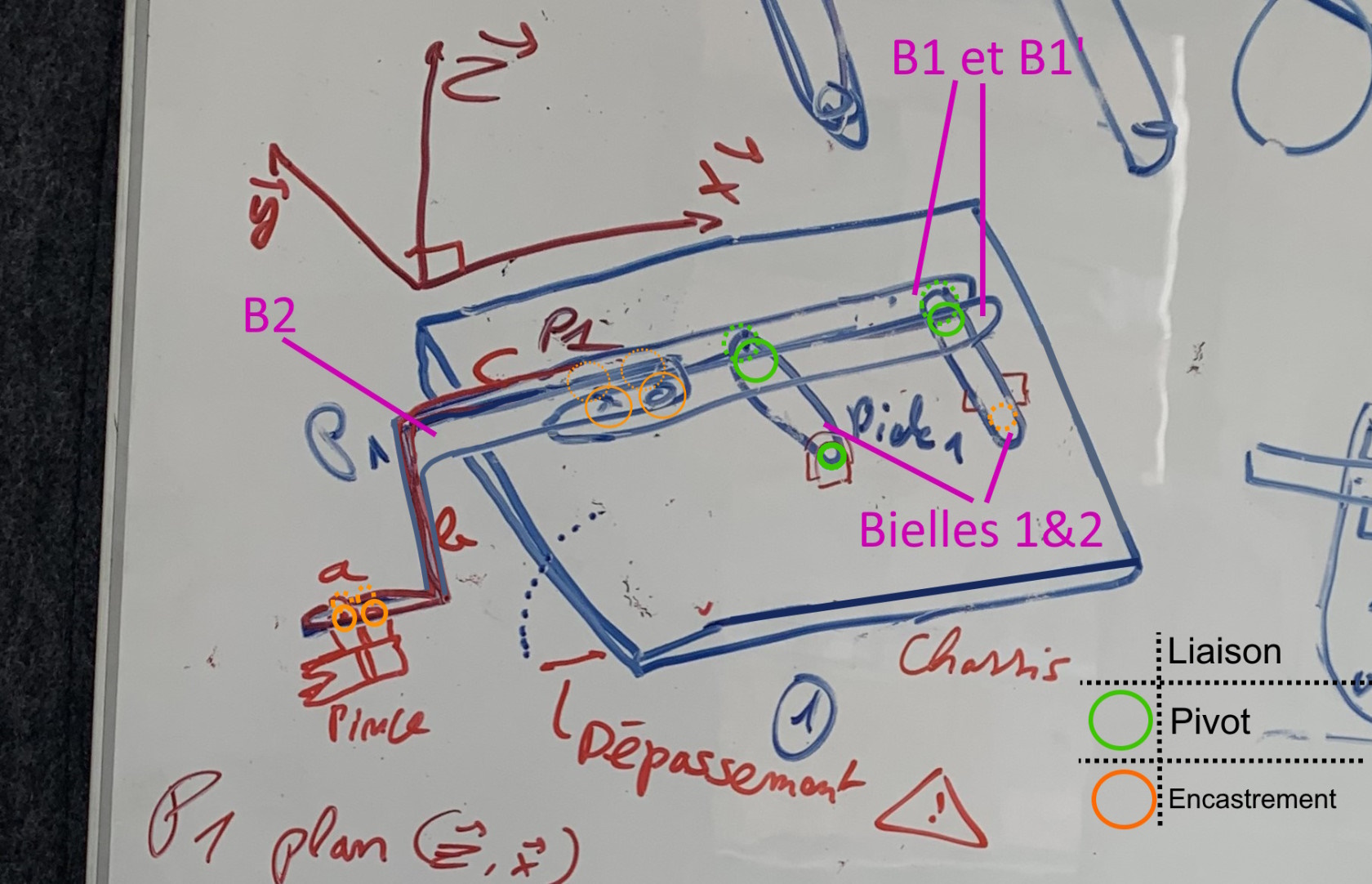
Le bras est composécomposé de 2 bielles montémontées sur des liaisons pivots, connectéconnectées àà deux pièpièces latélatérales (B1 et B1') fixéfixées au châchâssis par encastrement. La pièpièce B2 assure la continuitécontinuité vers l’l’avant jusqu’àjusqu’à la pince.
IdéIdée 2 : Brasarticuléarticulé via 2 bielles de part et d'autre duchâchâssis

Les bielles B1 et B2 montémontées sur pivots, sont chacune reliéreliées àà un support moteur : A1 àà droite et A2 àà gauche. Les moteurs auraient ainsi étéété installéinstallés sur deux supports indéindépendants, chacun positionnépositionné de part et d’d’autre du châchâssis et reliérelié directement vers la bielle associéassociée.
-
IdéIdée 3 : Positionner 2 bielles sur une desextrémitéextrémités duchâchâssis
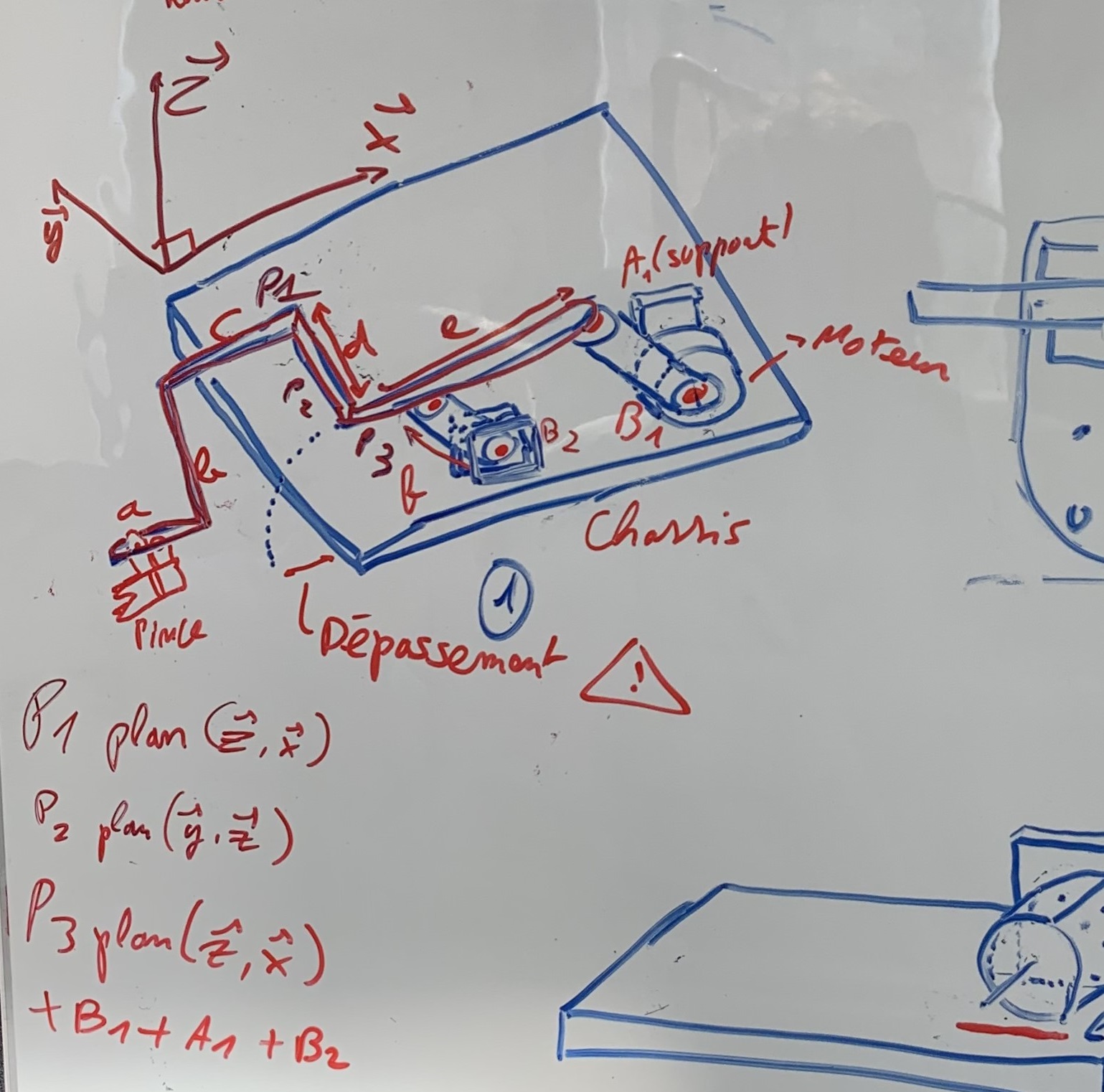
La pièpièce B1 agit comme bielle motrice, montémontée sur le support A1. La bielle B2, situésituée juste àà côtécôté, complècomplète le montage paralléparallélogramme en se reliant àà l’extrémitél’extrémité de l'éléélément e qui prolonge le bras vers l’l’avant.
Avantages & InconvéInconvénients :
Les idéidées 2 et 3 facilitaient l'organisation des composants sur le châchâssis laissant plus d'espace pour l'intéintégration d'autres composants. Cependant, elles se révèrévèlent plus complexes pour la conception puisque la(es) liaison(s) encastrement(s) nénécessaires pour fixer solidement la partie du bras perpendiculaire (de longueur d sur l'idéidée 3) aux autres élééléments éétaient difficilement réréalisables compte tenu de la largeur limitélimitée de bois disponible.
b) Bras final :
Nous nous sommes finalement orientéorientés vers une dérivédérivée de la premièpremière option : 2 bielles sont alignéalignées et fixéfixées au chassis diffédifféremment. La bielle avant agit comme une bielle motrice : elle est vissévissée àà un moteur par deux vis assurant la transmission du mouvement. Ce moteur est lui-mêmême fixéfixé au chassis àà l'aide d'un support, montémonté serréserré au châchâssis grâgrâce àà un systèsystème de cales ajustéajustées.
La bielle arrièarrière est quant àà elle directement maintenue entre deux pièpièces supports de par et d'autre de la bielle, et fixéfixées par une vis. L'éécart éétant trètrès petit, le jeu reste nénégligeable. De la mêmême manièmanière, ces supports sont montémontés serréserrés au châchâssis àà l'aide de cales, assurant une fixation sans jeu. Le mouvement de pivot est rendu possible grâgrâce àà l'espace libre préciséprécisément permis entre les supports, ce qui permet àà la bielle de tourner autour de son axe.
Le dernier éléélément du bras, qui supporte la pince, est de forme arquéarquée. En effet, dans une premièpremière version, on avait fait une pièpièce droite qui rentrait en collision avec la partie de la bielle connectéconnectée au moteur lors de la descente maximal du bras. La forme arquéarquée permet donc de rérésoudre ce problèproblème.
La pièpièce relie latélatéralement aux extrémitéextrémités des deux bielles grâgrâce àà des roulements connectéconnectés par 2 vis transversales. Elle permet de maintenir une distance fixe entre les bielles mêmême en l'absence de paralléparallélogramme. Toutefois, les vis reliant les bielles àà cette pièpièce flottaient légèlégèrement, ce qui engendrait un jeu. Pour y reméremédier, nous avons entouréentouré les vis de papier scotch afin de combler l'espace des trous fait et améaméliorer l’adhél’adhérence.
Ainsi voici une premièpremière version détaillédétaillée avec mesure de notre systèsystème. En effet, aprèaprès mesure, en sachant que nous avions àà disposition du bois de 3.00 ou 6.00 mm, est 13/14 n'éétant pas des multiples de 3, nous avions au prépréalable convenu que nous partirions sur une pièpièce large de 12mm (3+6+3) et que nous rajouterions des chutes trètrès fines de bois pour approcher les 13.5 cm.
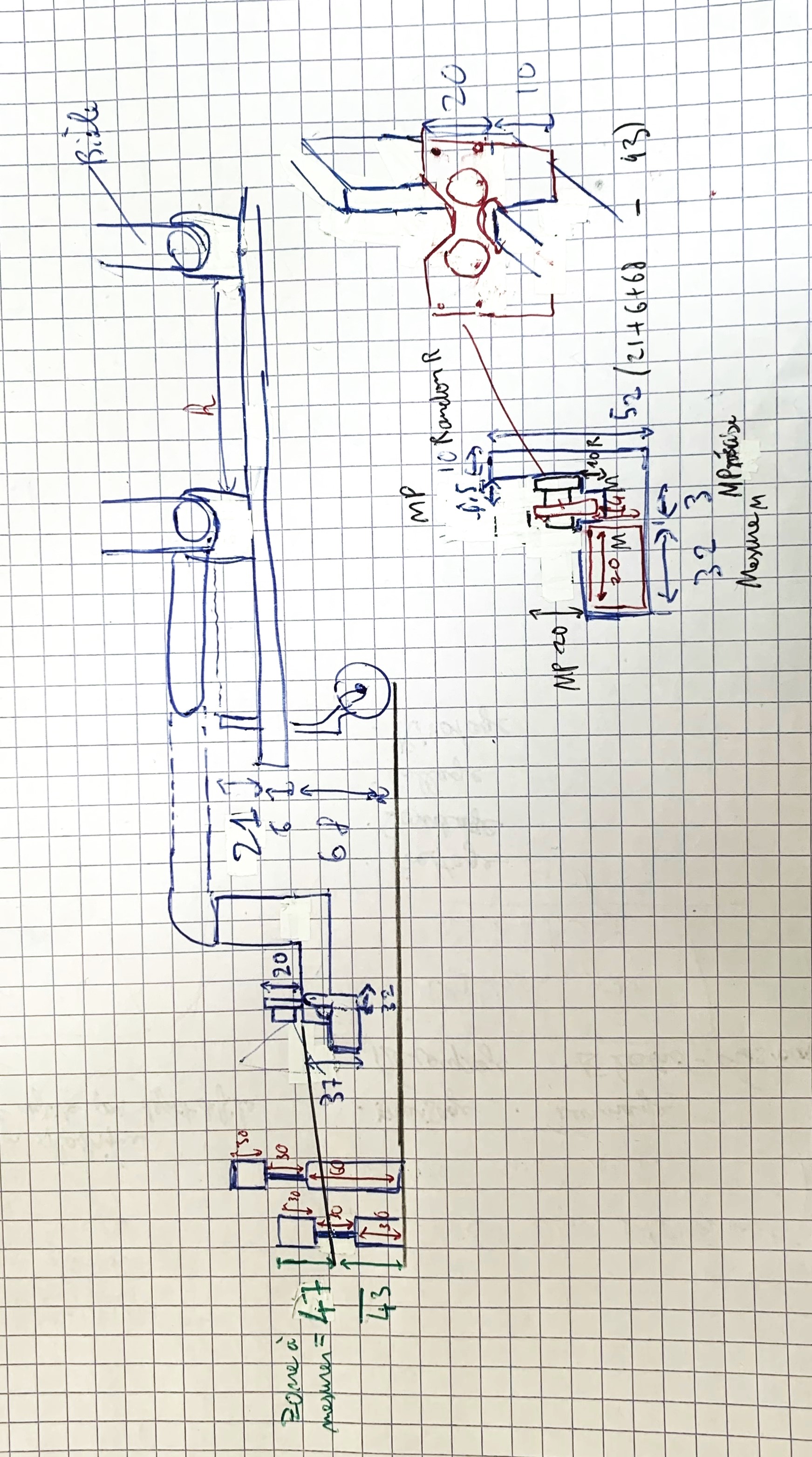
SchéSchéma bras avec mesures et solution de maintien du capteur IR
Au final, toutes les pièpièces ont étéété modélisémodélisées sur mesure dans SolidWorks, nous permettant alors d'ajuster les dimensions :
- bielle
pièpiècearquéarquée : choisie par rapportàà la pince- support moteur
- support bielle
- cales
Elles ont ensuite étéété obtenues par dédécoupe laser dans du bois de 6 mm d'éépaisseur pour assurer une robustesse. Un axe d'améamélioration aurait étéété d'augmenter la longueur des bielles pour que celle en avant soit moins en collision avec les câcâblages.
Pour garantir la compatibilitécompatibilité de cette structure avec l'ensemble du robot, il a étéété nénécessaire de travailler en éétroite collaboration avec la conception du châchâssis et la fixation des roues àà celui-ci, pour ééviter tout conflit d'espace.
2.2.2 Conception et usinage du châchâssis
Notre châchâssis a étéété usinéusiné par dédécoupe laser àà partir d'une plaque rectangulaire de 6 mm d'éépaisseur avec des extrémitéextrémités arrondies. Il a étéété pensépensé pour êêtre suffisamment long et large pour accueillir :
- Une mini plaque Labdec
- Une batterie 12V
- Une carte Arduino UNO et son CAN BUS Shield
- Le bras
montémonté - Les supports/moteurs
Sa modémodélisation sur SolidWorks a étéété faite en prenant en compte la mesure de ces diffédifférents composants.
Comme vu, les supports du bras et des moteurs devaient êêtre parfaitement intégréintégrés au châchâssis. Nous avons donc réaliséréalisé 5 dédécoupes rectangulaires en longueur réréparties de part et d'autre de la surface. Ces ouvertures permettent d'emboîemboîter les supports du bras et des moteurs, qui comportent eux-mêmêmes deux trous rectangulaires en largeur. Dans chacun de ces trous, nous avons inséréinséré des cales rectangulaires par le dessus et le dessous du châchâssis, de manièmanière àà bloquer fermement chaque support par serrage. Nos moyens de fixation permettent toujours un assemblage rigide mais toujours dédémontable en cas d'ajustement de l'assemblage. Un trou circulaire a éégalement étéété percépercé àà l'avant pour la roue folle. Un trou éégalement pour permettre le cable management. On note que la largeur du châchâssis est plus grande que préprévu àà l'arrièarrière du châchâssis du fait d'une erreur sur les mesures de la batterie qui ont étéété donnédonnées.
2.2.3 Fixation des roues
Pour que le robot puisse rouler et donc bouger dans l'espace, nous avons utiliséutilisé les deux moteurs donnédonnés. Les moteurs sont positionnépositionnés symésymétriquement dans le milieu arrièarrière du châchâssis. Nous avons ainsi commencécommencé par fixer les roues directement sur les axes moteurs. Cela permis grâgrâce àà des pièpièces rouges fournies avec le kit. Ainsi dèdès que les moteurs sont alimentéalimentés, les roues arrièarrières tournent. Les moteurs ont ensuite étéété vissévissés sur des plaques/supports que nous avons prépréalablement inséréinsérées dans les dédécoupes du châchâssis. Le montage au châchâssis a étéété vu plus haut. Enfin, pour la roue folle àà l'avant nous avons simplement fait passer la vis de la roue par le dessous du châchâssis et bloquébloqué le tout avec un éécrou. Ces dispositions permettent alors un mouvement fluide du robot.

Support moteur avec trous moteurs + dédécoupes rectangulaires
2.2.4 Support pince / capteurs
a) Pince

La pince est placéplacée àà l'extrémitéextrémité de l'éléélément arquéarquée du bras du robot, de façfaçon àà ce qu'elle soit abaisséabaissée (axe z) par rapport au plan du châchâssis. Ce choix a étéété guidéguidé par des contraintes techniques. Si la pince avait étéété alignéalignée avec le bras ou àà hauteur du châchâssis, alors nous ne pourrions pas attraper le "totem" car ne correspondrait pas par rapport au mouvement permis.
Pour assurer le maintien de la pince au bras, nous avons dûdû nous soumettre àà sa conception imposéimposée : deux supports àà trous d'éépaisseur 3 mm pour encadrer notre pièpièce en arc grâgrâce àà des vis. Afin de garantir un bon maintien sans jeu, nous avons encore enrouléenroulé du scotch au niveau des vis. Les deux pattes de la pince espacéespacées d'un éécartement inconnu. Nous avons d'ailleurs placéplacé un bout d'éélastique entre les deux pattes de la pince pour que l'objet àà attraper adhèadhère mieux.
b) Capteur infra-rouge
Deux supports spéspécifiques ont étéété conçconçus pour fixer les capteurs. Le premier a étéété placéplacé au-dessus de la pince, sur la pièpièce arquéarquée àà l'avant du bras. Son support a étéété découpédécoupé de manièmanière àà l'encadrer de face, ce qui lui permet de tenir en ééquilibre et rester perpendiculaire au bras. GrâGrâce àà cette orientation, le capteur est directement tournétourné vers l'avant, ce qui lui permet de dédétecter tout objet se trouvant devant le robot, en particulier pour la saisie du totem. Pour le capteur du côtécôté droit : on applique le mêmême processus de fixation au châchâssis qu'avec la bielle en l'adaptant au support encadrant le capteur.
2.2.5 Assemblage mémécanique final
L'assemblage final a étéété réaliséréalisé progressivement aprèaprès avoir réaliséréalisé individuellement toutes les pièpièces modélisémodélisées. Chaque éléélément a étéété montémonté manuellement sur le châchâssis selon les dédécoupes préprévues. Pour assurer un bon ajustement nous avons parfois dûdû recommencer certaines pièpièces ou ajuster avec du scotch lorsque le jeu éétait trop important.
L'ensemble du bras a étéété montémonté sur les supports fixéfixés au châchâssis. Cependant, lors des premiers tests, le bras ne parvenait pas àà remonter correctement aprèaprès avoir étéété abaisséabaissé. Il s'est avéréavéré que le moteur seul ne fournissait pas suffisamment de couple pour soulever l'ensemble du bras et de la pince (àà moins de modifier çça dans le programme mais pas optimal). Pour rérésoudre cela, nous avons installéinstallé un éélastique, tendu entre l'arrièarrière du châchâssis et l'arrièarrière du bras. Ce dispositif agit comme une force de rappel en aidant le moteur lors de la remontéremontée du bras.
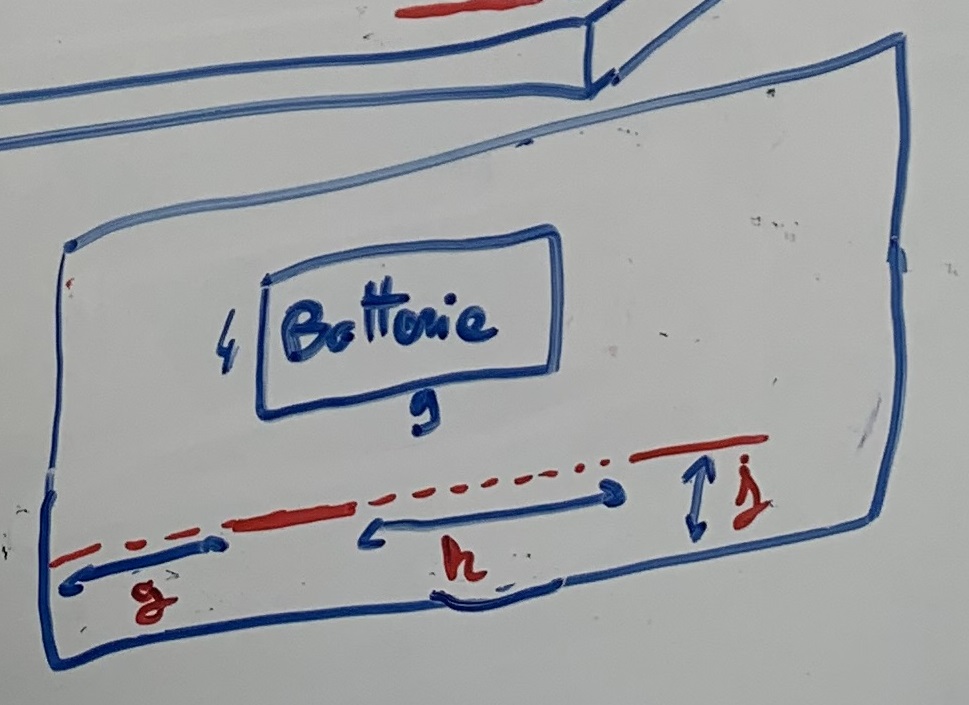
L'organisation des composants sur le châchâssis a étéété pensépensée afin d'optimiser l'espace tout en rérépartissant bien les diffédifférentes masses. Ainsi :
- La batterie 12V a
étéétéplacéplacéàà l'arrièarrière duchâchâssis, le poids le plus lourd donc au niveau des deux roues motrices - La carte Arduino Uno sur le
côtécôté droit, proche du capteur de droite - La plaque Labdec de l'autre
côtécôté afin de centraliser les connexions et faciliter l'arrangement descâcâbles - Le moteur
àà l'avant (vu)
Enfin, l'ensemble du montage a principalement étéété conçconçu pour qu'il soit dédémontable. De manièmanière génégénérale, toutes les pièpièces ont étéété fixéfixés àà l'aide de vis, boulons, ou bien par montage ce qui a nous a étéété trètrès utile au fil du projet pour faire circuler les diffédifférents composants entre les diffédifférents pôpôles.
2.2 PôPôle éélectronique
AprèAprès plusieurs séséances consacréconsacrées aux tests des composants, àà la recherche de schéschémas de câcâblage et àà la consultation des documents techniques, nous avons pu valider le bon fonctionnement de chacun des élééléments ainsi que leur mode d'emploi avant leur intéintégration.
- Moteurs KTECH : Nous les avons d'abord
alimentéalimentés unàà un avec 12V, pour nous assurer que tout marchait. - Pince 3551 : nous avons globalement
alimentéalimenté le servo avec le 5V de l'Arduino etdédéfini un court programme test afin de le tester. Le butéétait de s'assurer que la pince via le servo ouvrait/fermait bien ses pattes. - Capteurs ultrasons HC-SR04 : De la
mêmêmemanièmanière nous l'avonsbranchébranché sur l'Arduino etutiliséutilisé un code test pour afficher les distancesmesurémesurées. Cela nous a permis devévérifier que le signal revenait bien et que les valeurséétaientcohécohérentes.
Une fois cela fait, nous avons pu éétablir une documentation claire et structuréstructurée des branchements de l'ensemble des élééléments éélectroniques. Le but est de rérésumer et d'anticiper les connexions àà réréaliser pour chaque composant. Cette doc garantie une comprécompréhension commune des branchements àà effectuer pour tous les membres du groupe.
Documentation branchements
Composants :
→→ pin quelconque : àà adapter selon le code
Pince 3551 avec servomoteur intégréintégré :
Branchements avec CAN BUS SHIELD :
- Fil noir = masse
→→ GND du CAN BUS - Fil rouge = puissance du servo (Vservo, borne positive)
→→ Vin du CAN BUS - Fil blanc = signal
d’d’asservissement du servomoteur, commande→→ pin quelconque - (Fil vert =
PotentiomèPotentiomètre = lire l'angle position du moteur,nénécessaire pourréréguler la commande→→ pin quelconque)
Capteurs de distance àà ultrasons HC-SR04 :
Branchements avec CAN BUS SHIELD
Pour les 2 capteurs :
- Fil rouge
→→ Vcc = + 5V - Fil bleu
→→ trig =ÉÉmission des ultrasons, on lance la mesure→→ pin quelconque - Fil vert
→→ echo = Renvoie ladurédurée du retour de l'éécho, calcul la distance→→ pin quelconque - Fil noir
→→ GND = masse del’l’alimentation
Moteurs KTECH MS4015-V3 :
Branchements avec batterie et CAN BUS SHIELD (I = 0.06A si alimentation)
Pour les 3 moteurs :
- 2 fils rouges
liéliés→→ + 12V pince croco / borne + - 2 fils noirs
→→ masse (unnénécessaire) pince croco / borne - - Fil bleu H
→→ borne CAN H du CAN BUS - Fil jaune L
→→ borne CAN L du CAN BUS
Soudure àà réréaliser :
- 2 fils rouges capteurs ultrasons + un fil rouge pince servo moteur
→→ + 5V CAN - 2 fils GND capteurs ultrasons
→→ GND CAN
Le montage a étéété réaliséréalisé progressivement, en suivant les plans de câcâblage dédéfinis et en travaillant en accord avec le pôpôle informatique par rapport àà la connexion Arduino.
Pour obtenir un rérésultat propre nous avons fait une gestion des câcâbles pour ééviter les croisements inutiles.
Nous avons notamment percépercé un trou dans le châchâssis pour faire passer les fils du moteur àà travers. Les fils rouge (alimentation) ont étéété regroupéregroupés d'un côtécôté d'un bornier connectéconnecté àà la mini Labdec, tandis que les fils noirs ont étéété mis de l'autre côtécôté. MêMême chose avec les fils de signal CAN bleu H et jaune L.
2.3 PôPôle Informatique
2.3.1 Description brèbrève du code
Pour mettre en route le robot, on appuie sur un bouton poussoir. Le programme se rérésume ainsi :
- On enregistre des mesures initiales pour
dédéterminer la distancelatélatérale deréféréférence par rapport au murgrâgrâce au capteur. Cela permet au robot de s'orienter. - Le robot avance le long du mur en ajustant en continu sa trajectoire pour qu'elle soit
parallèparallèle au mur en fonction des mesures du capteur, on le fait en fixant la distancemesurémesurée par le capteur IRlatélatéral. En effet, l'éécart fixe et constant lors dudédéplacement est permisgrâgrâce un correcteur proportionnel. - Le capteur
dédétecteéégalement lapréprésence d'une balise en surveillant les variations brutales des mesures de distance. - Si
dédétection, alors cela provoque une transition d'éétat dans la machineààéétat et le robot s'aligne faceàà la balise, puis il effectue un virageàà90°90° pour se mettre dans la direction du totem. - Le robot s'aligne de nouveau avec le mur et s'avance pour se positionner avant de balayer devant lui
àà la recherche du totem. Un prototype de code pour que le robot se metteparallèparallèle au murgrâgrâceàà desdédéplacements infimes en boucle etàà l'observation de leurdérivédérivée aétéété entrepris. - Pendant cette phase, le bras descend jusqu'
àà une position horizontaledédéfinie. Celle-ci estcalculécalculée demanièmanièreàà percevoir le haut du "totem" peu importe la taille de celui-ci. Le balayage tout comme ladédétection d'une balise surveille lesdiffédifférences importantes de distance pour le capteur frontal. Lorsqu'il pense avoirtrouvétrouvé le "totem", il s'avance vers lui en ligne droite et s'il le perd de vue, il retente un balayage. Lorsqu’Lorsqu’ils’s’approche du totem, le robot ajuste dynamiquement la hauteur de sa pince pour saisirl’l’objet au bon niveau. Cette action repose sur une fonction dedédétection du sommet du totem, dont la position est convertie en une consigne de hauteuradaptéadaptéeàà la taille du bras, afin de garantir une prisepréprécise.- Le robot avance ensuite d'une distance
dédéfinie et, la pince se ferme pour le prendre. -
Un signal analogique de retour du servo confirme que la pince a bien
étéétéferméfermée. -
Le robot bascule alors dans
l’él’état suivant pour repartir vers la zone dedédépose. -
Une fois de retour
ààl’l’emplacement initial, le robot suit lesmêmêmeséétats en sens inverse pours’s’aligneràà nouveau. -
Enfin dans l'
éétat DROP, la pincerelârelâche le totem.
3. Contribution individuelle :
|
Esteban |
Mécanique :
Informatique :
Chef de projet :
|
|
Matthieu |
|
|
Pierre-Louis |
Informatique :
|
|
Emile |
|
|
Diyana |
Informatique :
Gestion et |
|
Rayan |
Informatique :
|