PROJET ROB3 Léo, Christian, Bastien, Quentin, Nicolas, Skander
06/02/2025:
ActivitéActivités du jour:
- Diagramme de Gantt
RéRépartition desrôrôles- Design
génégénérale du robot DéDéfinition de la logique du codeDéDécouverte dumatématériel
Diagramme de Gantt
- Nombre de
séséance et objectif remplie - A remplir dans les
dédétails au fil du projet
RéRépartitions des rôrôles
-
PôPôles informatique : Nicolas, Skander, Quentin -
Responsable
éélectronique: Christian (respo batterie) -
Responsable
mémécanique : Bastien (respo meca),LéLéo , Christian -
Chef de projet/
SecréSecrétaire : Quentin
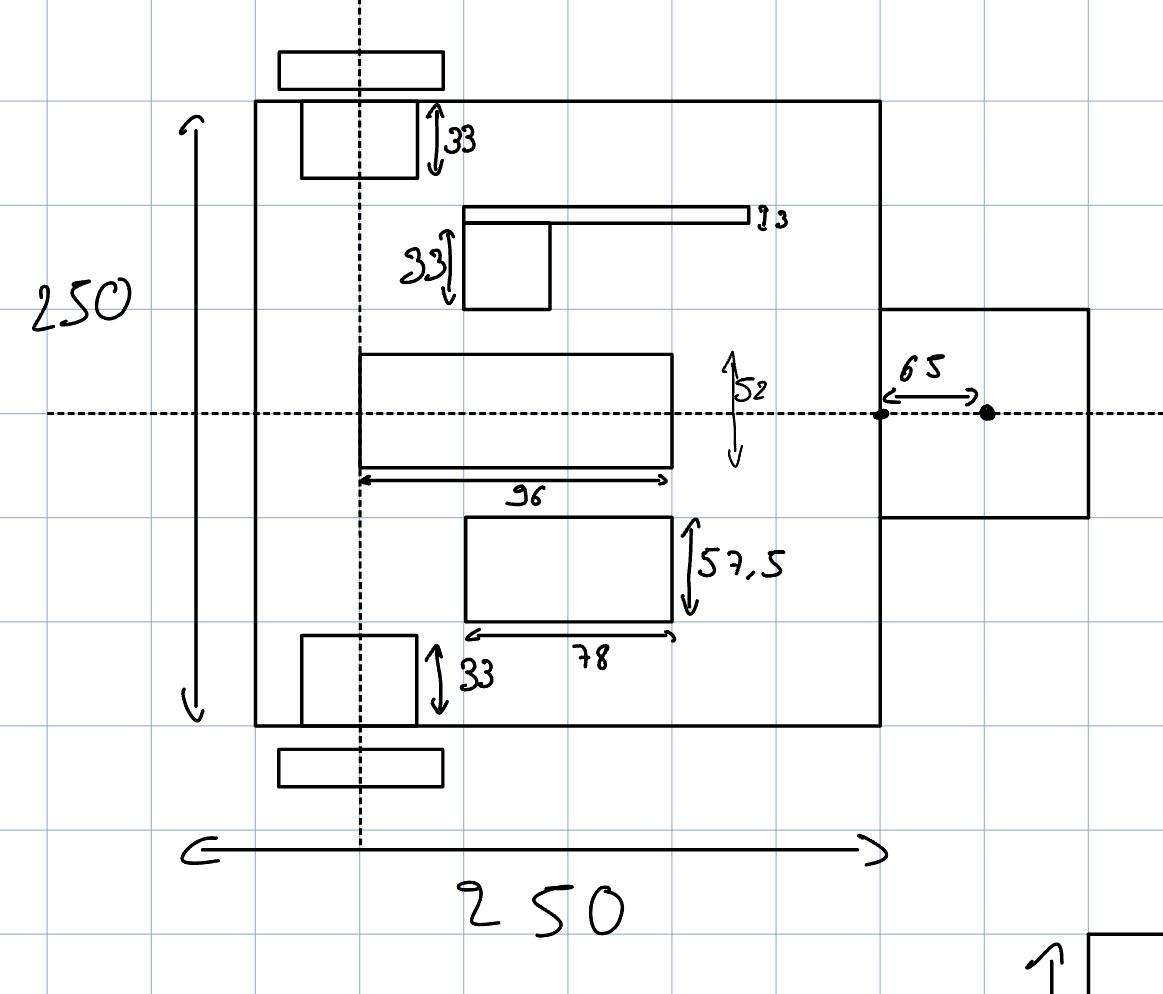
Design génégénérale du robot
- Base du robot rectangulaire
- 2 bras
articuléarticuléreliérelié auchâchâssis - Pince
reliérelié au brasarticuléarticulés - Dimension
génégénérale du robot a faire PièPièce de liaison adédéfinir
DéDéfinition de la logique du code
- Fonction a coder: Avancer, Tourner sur place,
DéDétection, Hauteur, Attraper cube - Logique du code
- Trouve un mur et le longer
- Trouver l'obstacle marquant la position de l'objet
- Trouver le premier obstacle qui marque l'
arrivéarrivée - Trouver le second obstacle qui marque l'
arrivéarrivée - S'
arrêarrêter
DéDécouverte du matématériel
A faire pour la séséance suivante
Lire la documentation des pièpièces éélectroniques
27/02/2025:
Activités du jour:
Pôles mécanique :
- Définition précises des dimensions du robot ( mesure en millimètre )
- Choix de la technique utilisé pour les pivots : Vis-rondelle-tube-rondelle-écrou serré pour bloquer les solides du pivot
- Répartition des rôles
- Design générale du robot
- Définition de la logique du code
- Découverte du matériel