PROJET ROB3 Léo, Christian, Bastien, Quentin, Nicolas, Skander
06/02/2025:
Activités du jour:
- Diagramme de Gantt
- Répartition des rôles
- Design générale du robot
- Définition de la logique du code
- Découverte du matériel
Diagramme de Gantt
- Nombre de séance et objectif remplie
- A remplir dans les détails au fil du projet
Répartitions des rôles
-
Pôles informatique : Nicolas, Skander, Quentin
-
Responsable électronique: Christian (responsables batterie)
-
Responsable mécanique : Bastien (responsables mécanique), Léo , Christian
-
Chef de projet/Secrétaire : Quentin
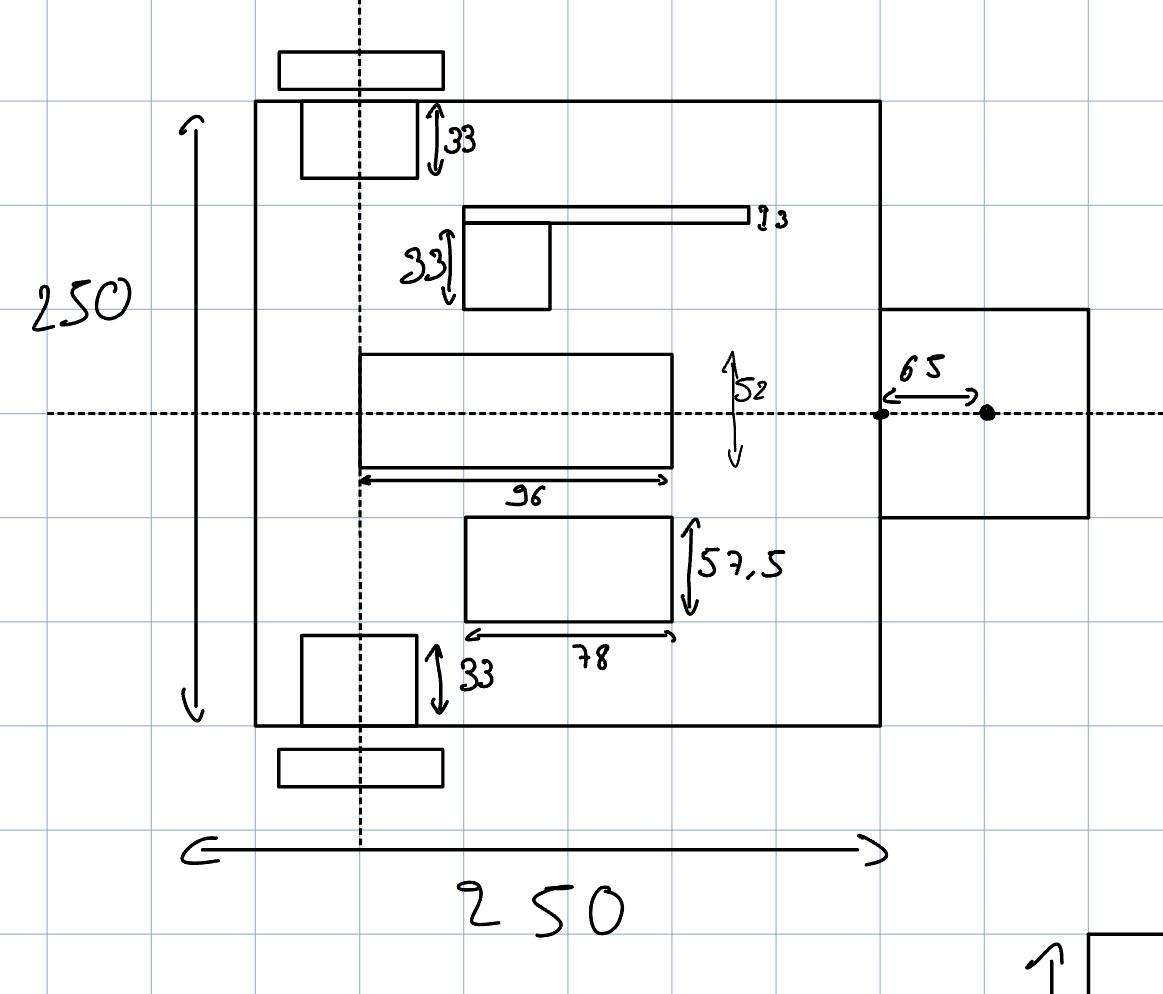
Design générale du robot
- Base du robot rectangulaire
- 2 bras articulé relié au châssis
- Pince relié au bras articulés
- Dimension générale du robot a faire
- Pièce de liaison a définir
Définition de la logique du code
- Fonction a coder: Avancer, Tourner sur place, Détection, Hauteur, Attraper cube
- Logique du code
- Trouve un mur et le longer
- Trouver l'obstacle marquant la position de l'objet
- Trouver le premier obstacle qui marque l'arrivée
- Trouver le second obstacle qui marque l'arrivée
- S'arrêter
Découverte du matériel
A faire pour la séance suivante
Lire la documentation des pièces électroniques
27/02/2025:
Activités du jour:
Pôles mécanique :
- Définition précises des dimensions du robot ( mesure en millimètre )
- Choix de la technique utilisé pour les pivots : Vis-rondelle-tube-rondelle-écrou serré pour bloquer les solides du pivot
Photo de la solution pivot a fournir
Pôles informatique et électronique:
- Test sur le fonctionnement de la carte Arduino Bus CAN + SHIELD : le Shield permet d'éviter le bruitage des signaux sur l'entrée/sortie
- Utilisation de plusieurs moteurs simultanément différencier par leurs PIN, code Arduino a ajouter.
- Test de fonctionnement du capteur : fonctionnement du Capteur ultrasons HC-SR04 et code utiliser en annexe
- Test de fonctionnement de la pince : code utiliser en annexe
Durant la prochaine séance :
- Elec faire un schéma papier des fils électriques sur la maquette, a tester le plus tôt possible
- Meca prendre un main la machine de découpage laser et commencer la modélisation
- Info coder toutes les fonctions et les tester sans le robot, puis si possible sur la maquette
Annexe:
Documents rattaché :
TUTO_capteur.pdf
Pince.pdf