Réalisation d'une burette automatique (Groupe A)
Un modèle de documentation minimal pour tous les types de projets. Toutes les catégories ci-dessous doivent être renseignées, même de façon succincte.
IMPORTANT : Merci de sélectionner le / les tags adéquats dans le menu de droite, et de ne pas créer de nouveau tag.
Les fichiers sources doivent idéalement être joints à cette page grâce à l'icône trombone du menu de droite.
Des hésitations sur comment bien documenter et utiliser l'interface ? Consultez le tutoriel "Comment documenter"
Informations
-
Fatimat ABDULWAHAB, Shola ADENIYI, Aya BOUSSALEH, Hugo LUTZ et Raounaki SAID ABDALLAH
-
fatimat.abdulwahab@etu.sorbonne-universite.fr; shola.adeniyi@etu.sorbonne-universite.fr; Aya.boussaleh@etu.sorbonne-universite.fr ; hugo.lutz@etu.sorbonne-universite.fr ; raounaki.said_abdallah@etu.sorbonne-universite.fr
-
Projet IC 803 - Optimisation et contrôle de procédé
-
Octobre 2024 - Janvier 2025
Contexte
Dans le cadre de l'UE Optimisation et contrôle de procédés, nous devons effectuer la régulation d'un système à l'aide d'une carte Arduino. Pour ce faire, nous devons déterminer le matériel nécessaire ainsi que les branchements et le code qui permettront l'automatisation de notre procédé.
Objectifs
Notre sujet porte sur la réalisation d'une burette automatique. Pour effectuer la régulation, nous utiliserons un capteur de mesure d'intensité optique et notre actionneur sera un servomoteur; Le but est d'atteindre une couleur définie dans le récipient rempli d'eau.
Matériel
-
Arduino
-
Photorésistance
-
Servomoteur
-
Breadboard
-
Résistances
-
LED verte et rouge
-
Tuyaux
-
Fils
-
Bouteille
-
Robinet
-
Electrovanne
-
Agitateur (impression 3D)
Construction
(Fichiers, photos, code, explications, paramètres d'usinage, photos, captures d'écran...)
Étape 1
----
Étape 2
----
Étape 3
----
14/10/2024
Lors de notre rencontre, nous avons déterminé nos besoins en termes de matériel et nous avons commencé à tester les différents composants à tour de rôle en commençant par la photorésistance.
21/10/2024
Nous nous sommes réunis afin de mieux définir notre projet. Voici le procédé que nous souhaitons obtenir:
Dans une boîte opaque, nous aurons un récipient contenant de l’eau, la photorésistance et une lampe. La boîte opaque nous permet de contrôler la lumière qui sera détectée dans le milieu. Lorsqu'on appuie sur le bouton, un capteur à ultrason mesure le niveau du colorant/sirop à t=0, la LED rouge s’allume, l’agitateur se met en route et l’électrovanne s’ouvre. Tant que la photorésistance détecte plus de lumière qu’une valeur seuil, l'électrovanne reste ouverte donc on fait couler le sirop/colorant. Au fur et à mesure, la photorésistance détectera de moins en moins de lumière jusqu’à atteindre la couleur souhaitée. Une fois cette couleur atteinte, l’électrovanne se ferme, l’agitateur s’arrête, la LED rouge s’éteint et la verte s’allume. On mesure le niveau du colorant à tf afin de connaître la quantité qui a été versée pour atteindre la couleur définie; cette valeur sera ensuite affichée sur un écran LCD.
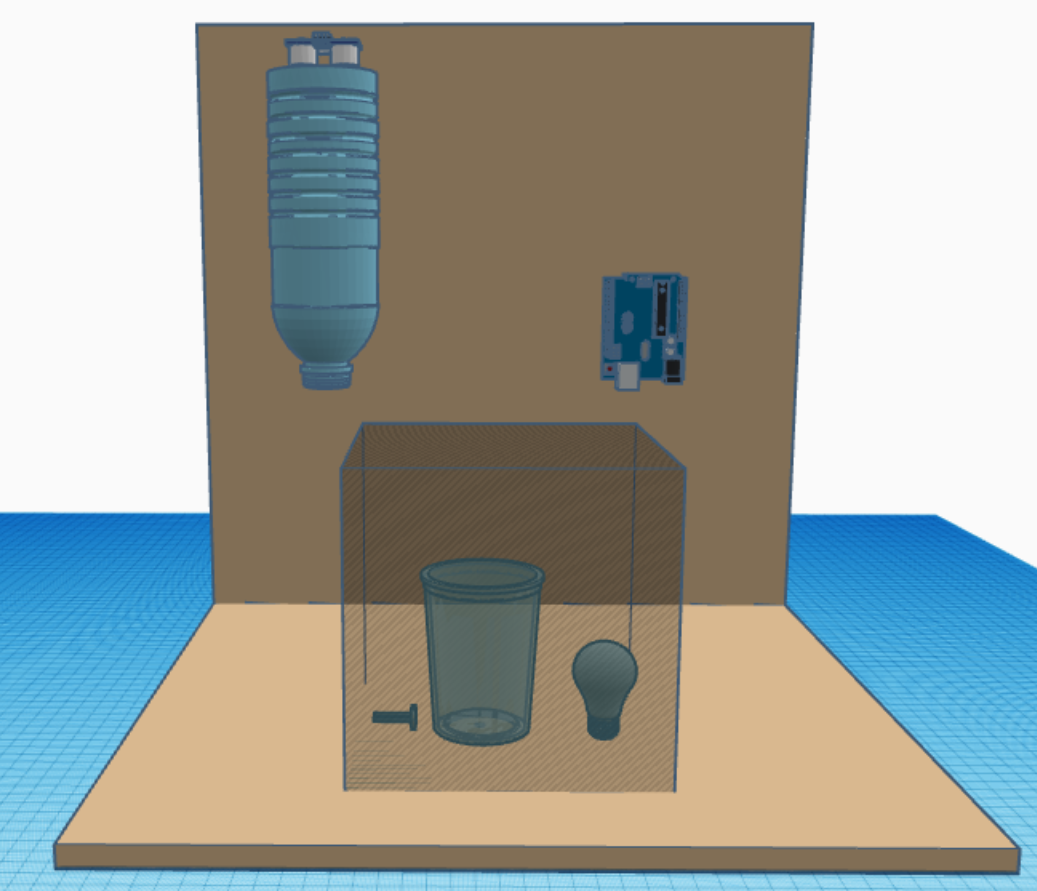
Figure 1: Schéma 3D de la burette automatique
07/11/2024
Nous nous sommes retrouvés dans une salle afin d'avancer sur le projet. L’objectif est de définir ce qu’il reste à faire et de se répartir les tâches afin que nous poussions véritablement commencer les tests en utilisant directement le matériel.
Nous avons réussi à faire fonctionner l’électrovanne en faisant couler de l’eau d’une bouteille à l’autre. De plus, la sonde pour la mesure de la distance est à présent fonctionnelle.
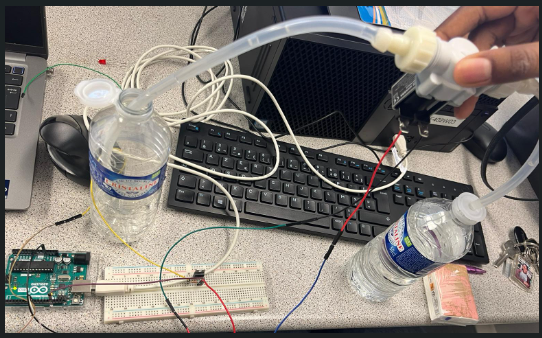
Figure 2: Fonctionnement de l'électrovanne
Pour l’agitateur, nous utiliserons ce modèle que nous allons imprimer en 3D: https://www.thingiverse.com/thing:4676097/files . Par la suite, on utilisera de la colle pour attacher l’agitateur au moteur. Nous avons utilisé le logiciel IdeaMaker pour dimensionner l'agitateur et nous avons lancé l'impression de notre agitateur de 10 cm.

Figure 3: Agitateur imprimé en 3D
25/11/2024
Nous nous sommes retrouvés au Fablab, l'objectif de la séance est de bien vérifier le fonctionnement de chaque élément séparé de notre système. Notamment, nous avons testé le moteur que nous utiliserons pour l'agitation. Il s'avére que nous avions un moteur pas-à-pas, alors qu'il nous faudrait un moteur DC pour pouvoir agiter à de vitesses suffisantes. Nous avons donc récupéré un moteur DC et par la même occasion un capteur de couleur. Nous avons pu tester le moteur DC et l'avons attaché d'une façon un peu précaire à l'agitateur imprimé en 3D.
Lors de la prochaine séance nous allons tester le capteur de couleur et également modifier l'agitateur de couleur pour rajouter une fixation au moteur directement en impression 3D.