Stick-Slip
Information
- Contacts : Benjamin MARTINEZ & Nathan THORPE (benjamin.martinez@etu.sorbonne-universite.fr et nathan.thorpe@etu.sorbonne-universite.fr )
- Etudes : L3 Sciences de la Terre
- Dates du projet : 24 Janvier - Mai 2024
- Responsables de l'UE LU3ST062 : Loïc LABROUSSE et Pierre THERY
- Responsable Projet Stick-Slip : Loïc LABROUSSE
24/01/2025
Explication du Projet : Modélisation de la réaction de la croûte terrestre suite à la formation d'une faille à partir d'un modèle comportant un tapis roulant sur lequel sont placés de tampons (ou patins) retenus par des ressorts tels que :
Idées :
- Reprendre le modèle en LEGO à un seul tampon déjà existant (comprendre son fonctionnement, identifier ses points forts et ses points faibles)
- Utiliser une courroie de vélo sans chaine comme tapis roulant (les dents permettant de mieux récupérer l'énergie mécanique transmise par le moteur via un système d'engrenages)
- Créer un cadre en bois pour solidifier la structure et éviter que les tampons ne quitte la courroie (utiliser du bois de type contreplaqué 7 plis)
- Créer un système de rail en aluminium afin de limiter des frottements des tampons avec le cadre (utiliser des roues avec roulements à billes dans les rails)
- Modifier la structure des tampons pour y placer un téléphone dessus et réaliser des mesures
- Conceptualiser un programme Python capable de récupérer les données via Phyphox
Livre sur le sujet :
La déformation des roches - LABROUSSE et YAMATO (partie 5, chap.17 : la dynamique du glissement co-sismique; 1.1 Le modèle du patin ressort)
31/01/2025
- Conceptualisation rapide de l'ensemble du modèle avec un focus sur les patins
- Etablir la liste des matériaux et parties utiles à la conception
- Début de schématisation graphique du prototype de patins
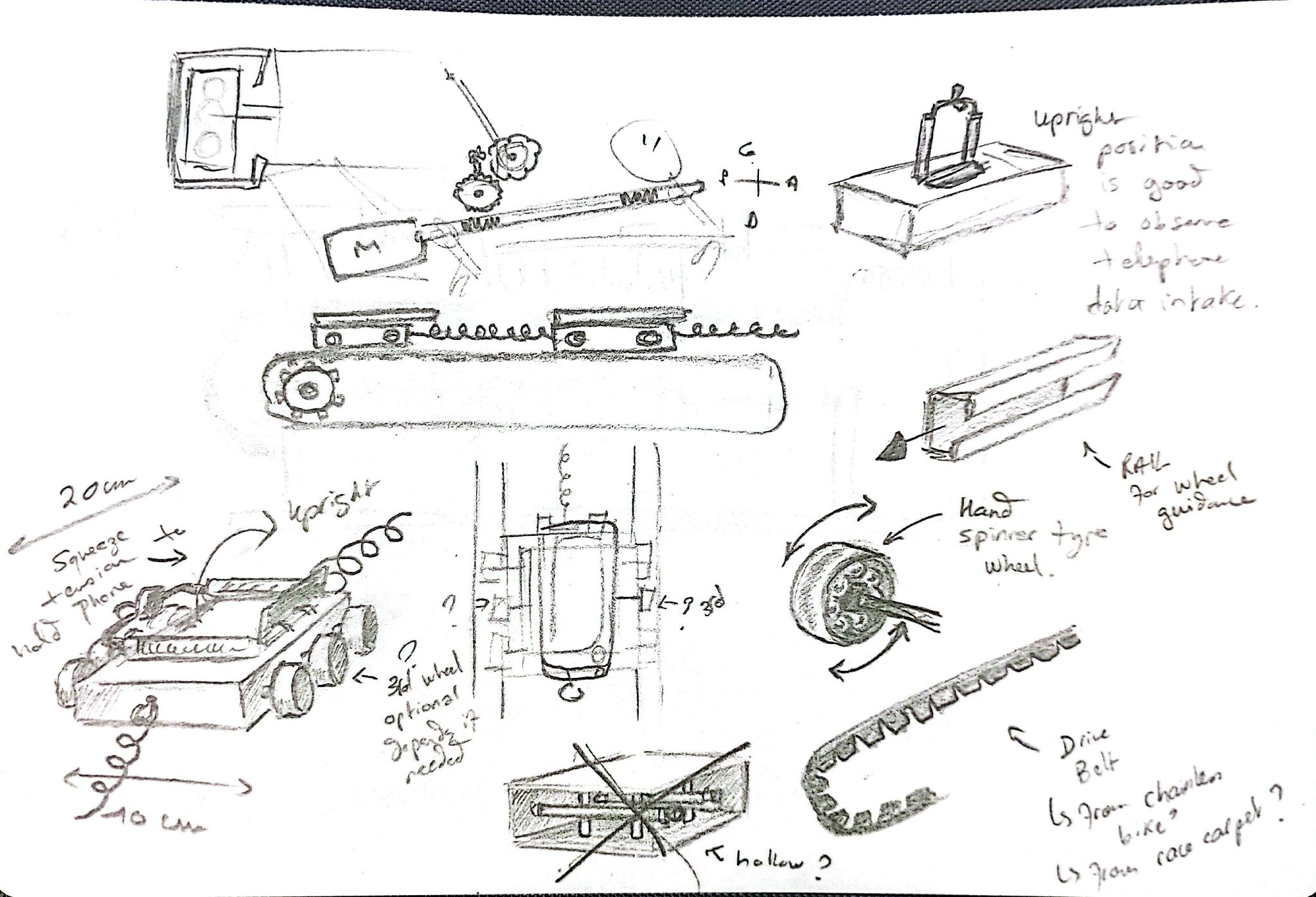
Fig 1: Brouillon , Brainstorming sur le design des patins avec porte-téléphone et modèle du rail.
07/02/2025
- Recherches sur les modèles de courroie potentiels:
I. BELTSERVICE CORPORATION (page d'accueil site officiel)
BROCHURE
Avantages
- Produits vendus au mètre
- Multiples Choix de matériaux et formes
- Qualité professionnelle
Inconvénients
- Fournisseur à l'étranger, potentiels frais d'importation
- Fournisseur industriel, prix industriel peut-être pas avantageux
- Demandent beaucoup d'informations et de prise de contact, n'offrent pas directement les produits avec les prix
Conclusion: Mauvais choix
II. RS-ONLINE
Courroie Contitech CONTI FO-Z, Section XPZ, long primitive : 1950mm, long int: 1874mm, long ext : 1963mm
https://fr.rs-online.com/web/p/courroies-en-v-et-courroies-trapezoidales/4742613?gb=s
Avantages
- 1963 mm -> longueur satisfaisante pour le projet
- Prix abordable
- Bonne disponibilité
- Engrenage adapté disponible
Inconvénients
- Largeur de la bande insuffisante -> plusieurs seront nécessaires (2 ou 3)
Conclusion: Bon choix
- Schématisation de la motorisation et des engrenages (repris du modèle des années précédentes)
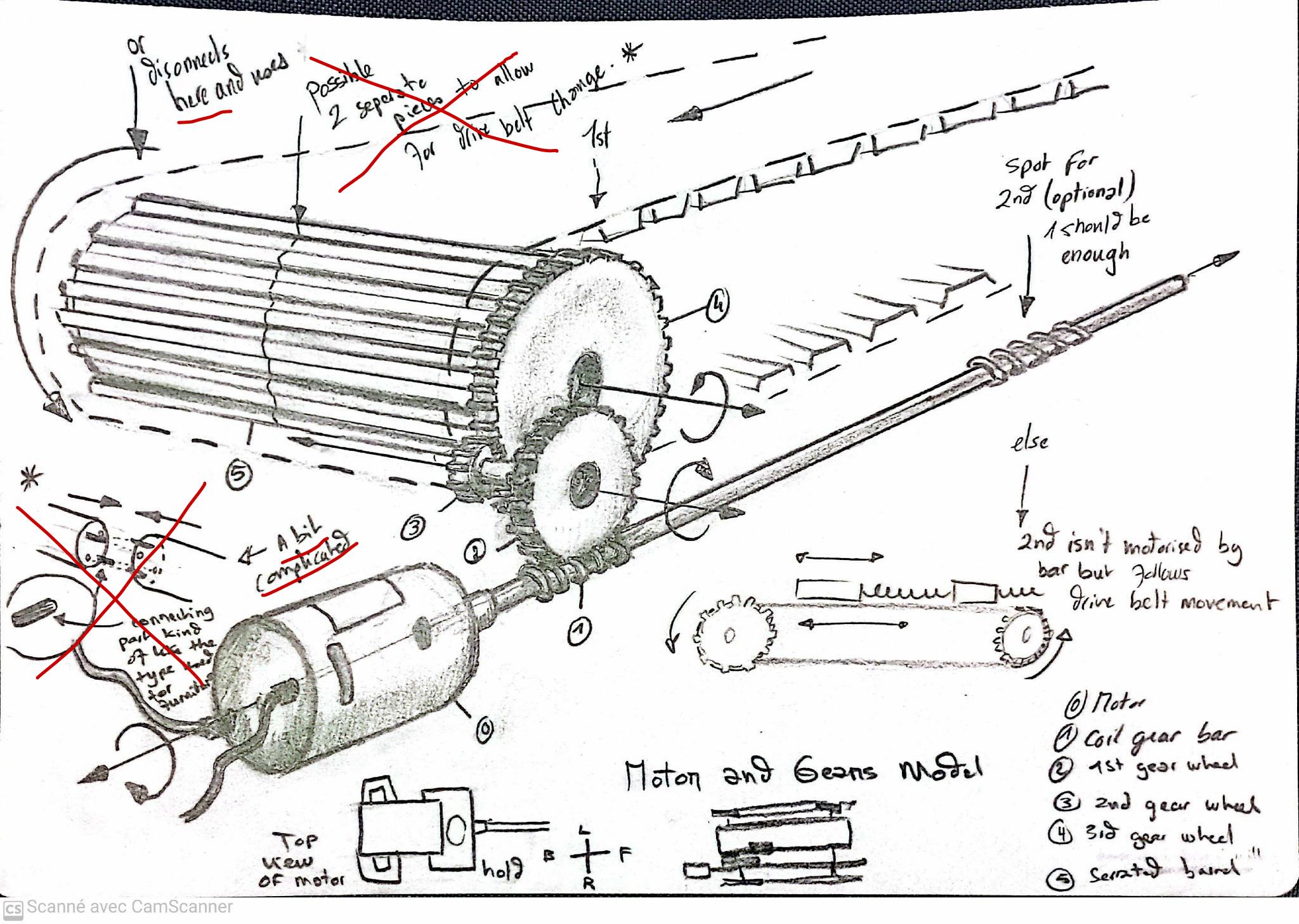
Fig 2: Brainstorming , Schématisation de la motorisation et des engrenages avec quelques théories sur comment démonter facilement pour éventuellement pouvoir changer la courroie.
15/02/2025
REMARQUE: Nous sommes trop lents sur le théorique, il faut faire avancer la partie pratique.
- Recherche dans les réserves du fablab pour des roulements à billes
-
Basé sur les données géométriques de la courroie nous estimons avoir besoin de parois latérales d'au moins:
1m de longueur, 10 cm de largeur , 3 cm d'épaisseur.
- Pour estimer la tailles des trous de l'axe à percer sur les parois, il faut savoir quel moteur utiliser: Nous sommes allés au fablab voir quels moteurs étaient disponibles: Nous avons été conseillé des moteurs plus puissants pour notre projet (moteurs pas à pas), nous avons aussi testé la puissance du moteur déjà présent sur le modèle LEGO -> selon les aides du fablab il devrait être déjà suffisamment puissant.
- Recherche de code pour le transfert du data de phyphox en temps réel: https://github.com/frederic-bouquet/phyphox-dataviz-tools