Cesar Giovanni Oliva Mendez
Master 1 Management de l'innovation Cesar_Giovanni.Oliva_Mendez@etu.sorbonne-universite.fr
Premier projet
Le Tigre Assis
1. Introduction
Je vais maintenant vous présenter une pièce complexe : le Tigre Assis.
Il s'agit d'une forme organique qui nécessite une gestion plus fine des supports et de la définition des maillages.
3 Analyse de la Fabrication (Análisis de Fabricación)
Concernant les dimensions, nous avons appliqué un facteur d’échelle de 70 %, ce qui nous a donné des dimensions de 65 mm sur l’axe X, 57 mm sur l’axe Y et 37 mm sur l’axe Z. L’axe X correspond à la largeur de la pièce, tandis que l’axe Z correspond à la hauteur, L’axe Y correspond à la profondeur de la pièce. Cette dimension a également été choisie en raison du temps d’impression. En conséquence, on peut observer que la texture du tigre n’est pas totalement homogène : les bords et les reliefs restent visibles. Toutefois, avec un temps d’impression plus long, la texture serait nettement meilleure.
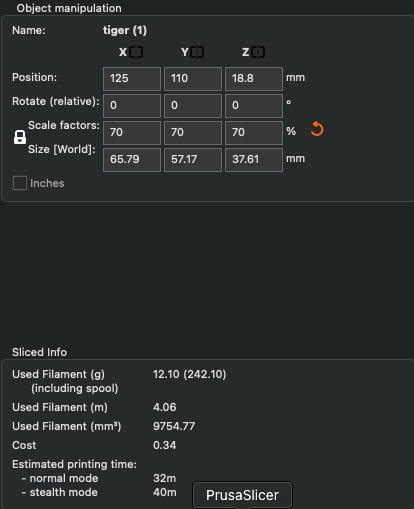
J’ai choisi les supports on build plate only afin que la partie de la tête ne s’affaisse pas et puisse être imprimée correctement.
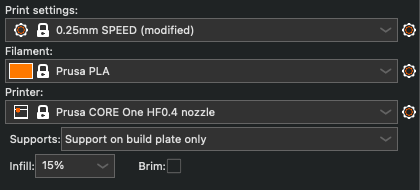
En ce qui concerne la température, ce sont les meilleures conditions, car dans le cas contraire, lorsqu’elle était trop élevée, la base du tigre se décollait parfois du plateau de l’imprimante.

4. Resultat

5. Conclusion
Le résultat n'est pas mauvais, mais il aurait fallu accorder plus de temps à l'impression. En augmentant la vitesse d'extrusion, la qualité de finition du tigre n'a pas été optimale
Parmi les problèmes rencontrés lors de l’impression, on peut observer que la partie de la base, plus précisément au niveau de la queue du tigre, n’était pas très uniforme. Il serait donc nécessaire de corriger les paramètres des supports afin que le tigre ait un meilleur rendu. Néanmoins, je considère que le résultat est très bon pour une première impression réalisée.
Et pour conclure, je vous laisse ici le lien où vous pouvez trouver le fichier afin d’imprimer votre tigre. C’est un modèle très joli et une excellente petite figurine à mettre dans votre chambre. Merci.
Second projet
La Sphère Captive (The Trapped Sphere)
1. Introduction (Introducción)
je vais vous présenter un projet de design paramétrique que j'ai réalisé avec OpenSCAD : La Sphère Captive
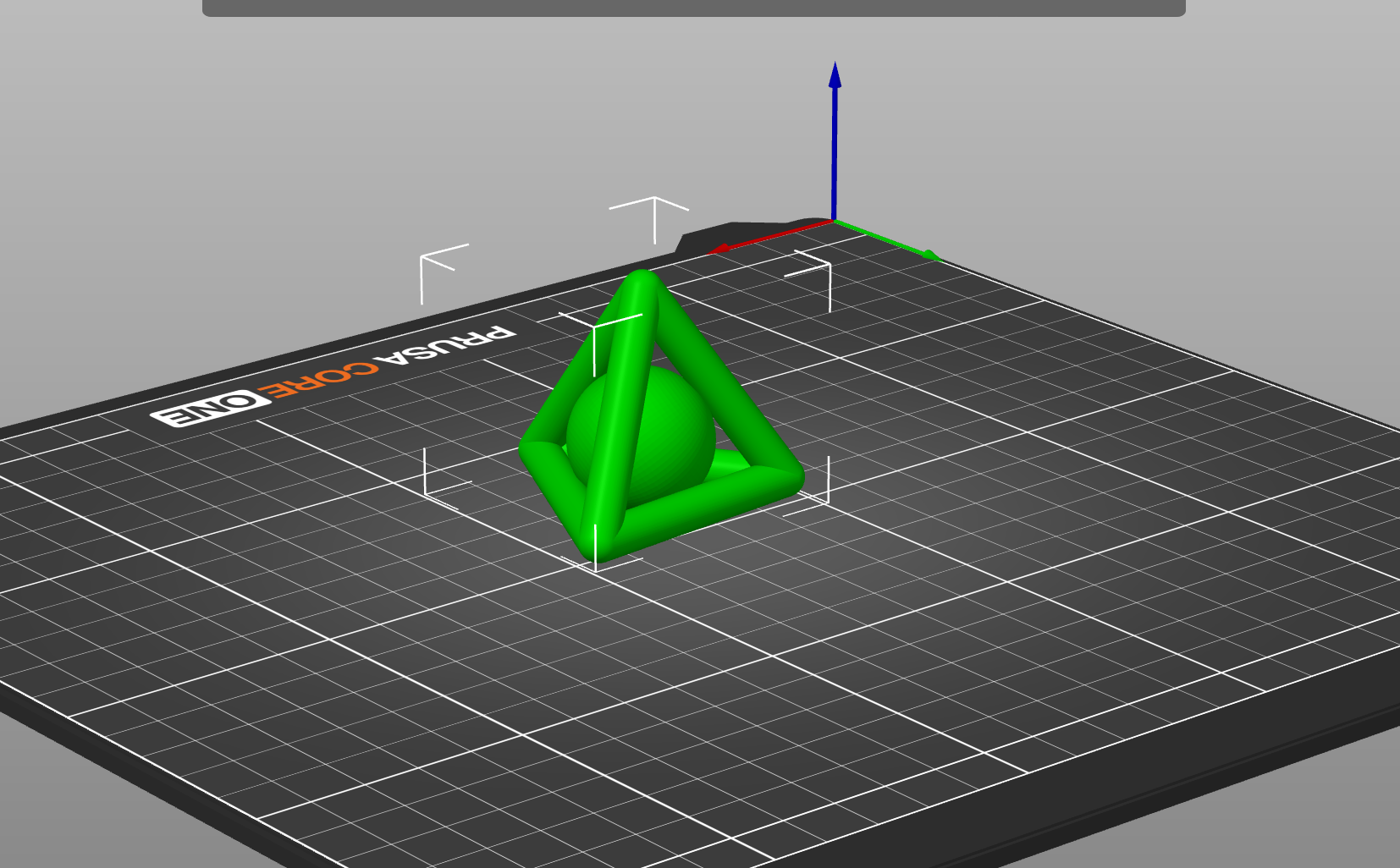
2. Le Concept (El Concepto)
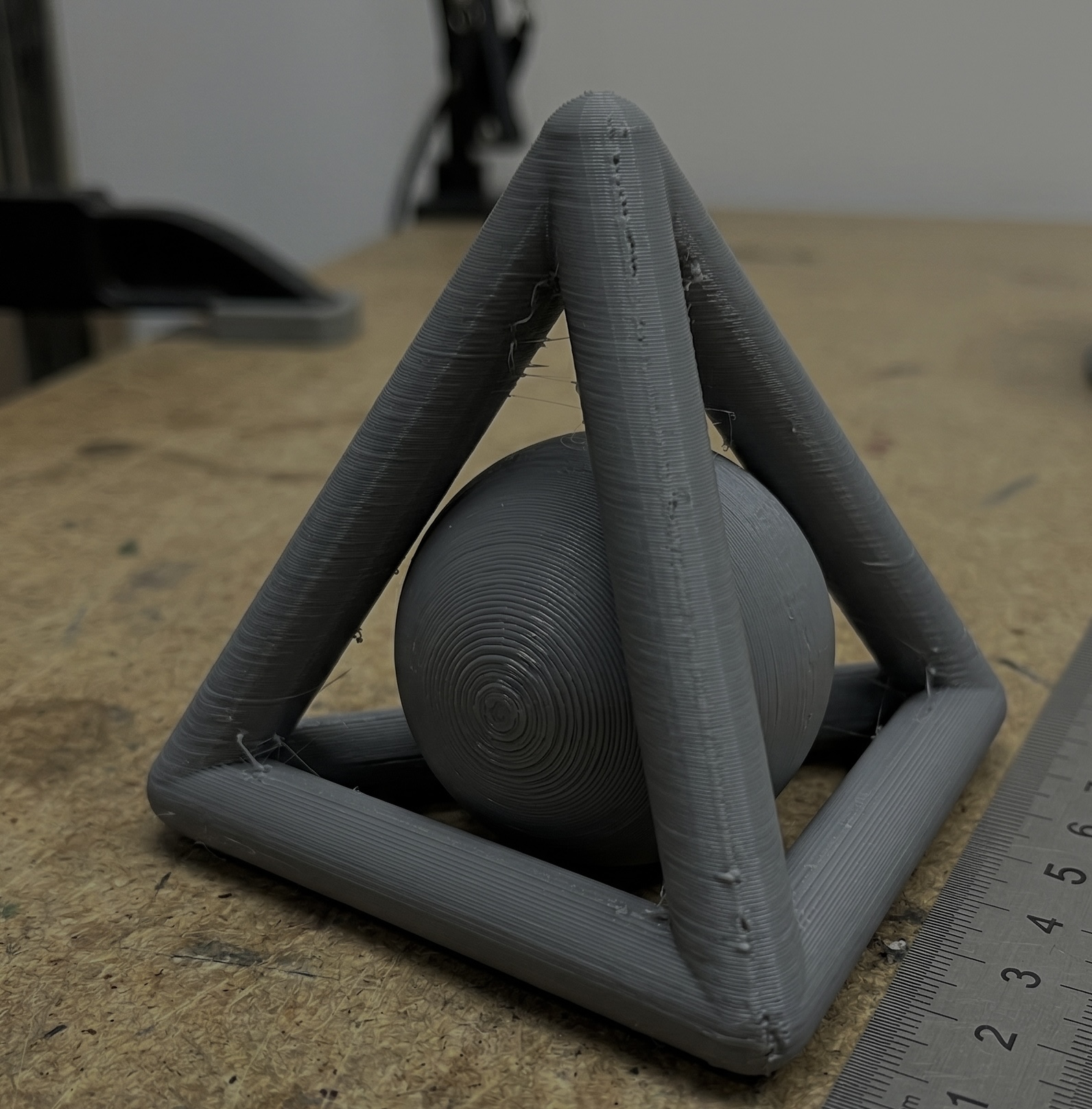
Le concept est une figure géométrique impossible. Il s'agit d'une sphère enfermée à l'intérieur d'un tétraèdre. La particularité est qu'elle est imprimée en une seule pièce , ce qui rend impossible l'extraction de la balle sans briser la structure.
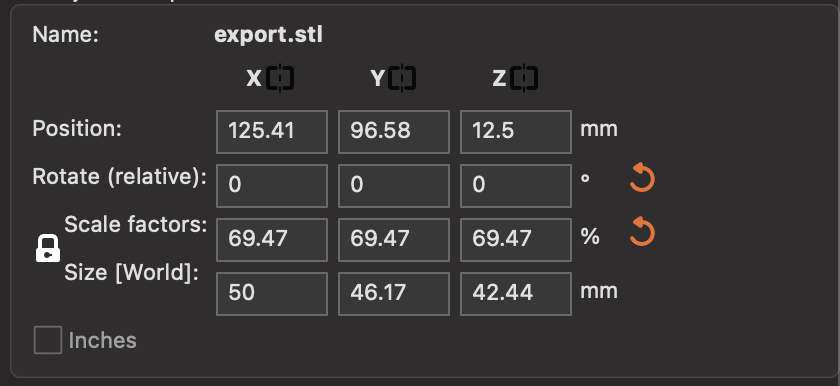
3. Les Paramètres Techniques
;

4. Les Paramètres
5. Resultat
6. Conclusion
Pour conclure, je dirais que la texture actuelle de ma figure n'est pas encore optimale. Je pense qu'une température d'extrusion légèrement plus élevée et une vitesse d'impression plus lente (plus de temps par couche) permettraient d'obtenir une meilleure apparence de surface et une finition plus lisse."
Cependant, les paramètres de structure et les tolérances sont bons.
GROUPE pour Arduino: TERZI Dila, AKSU Dilara, OLIVA MENDEZ Cesar Giovanni
Exercice 3 : Clignotement de deux LEDs avec Arduino
Contexte
Cette activité avait pour objectif de découvrir la programmation Arduino à travers la réalisation d’un montage électronique simple.
Avant toute manipulation réelle, une phase de simulation a été effectuée sur TinkerCAD afin de vérifier la cohérence du câblage et le comportement logique du circuit.
Cette démarche permet :
-
de tester le fonctionnement du programme,
-
de limiter les erreurs de connexion,
-
d’éviter d’endommager les composants.
Objectif du premier exercice
Le but du premier exercice était de faire clignoter deux LEDs simultanément selon un intervalle de temps défini.
Les deux LEDs doivent :
-
s’allumer en même temps,
-
rester allumées pendant 1 seconde,
-
puis s’éteindre pendant 1 seconde,
-
et répéter ce cycle en continu.
Matériel utilisé
-
Carte Arduino Uno
-
2 LEDs
-
2 résistances de 220 Ω
-
Breadboard
-
Fils de connexion
-
Logiciel Arduino IDE
-
Simulateur TinkerCAD
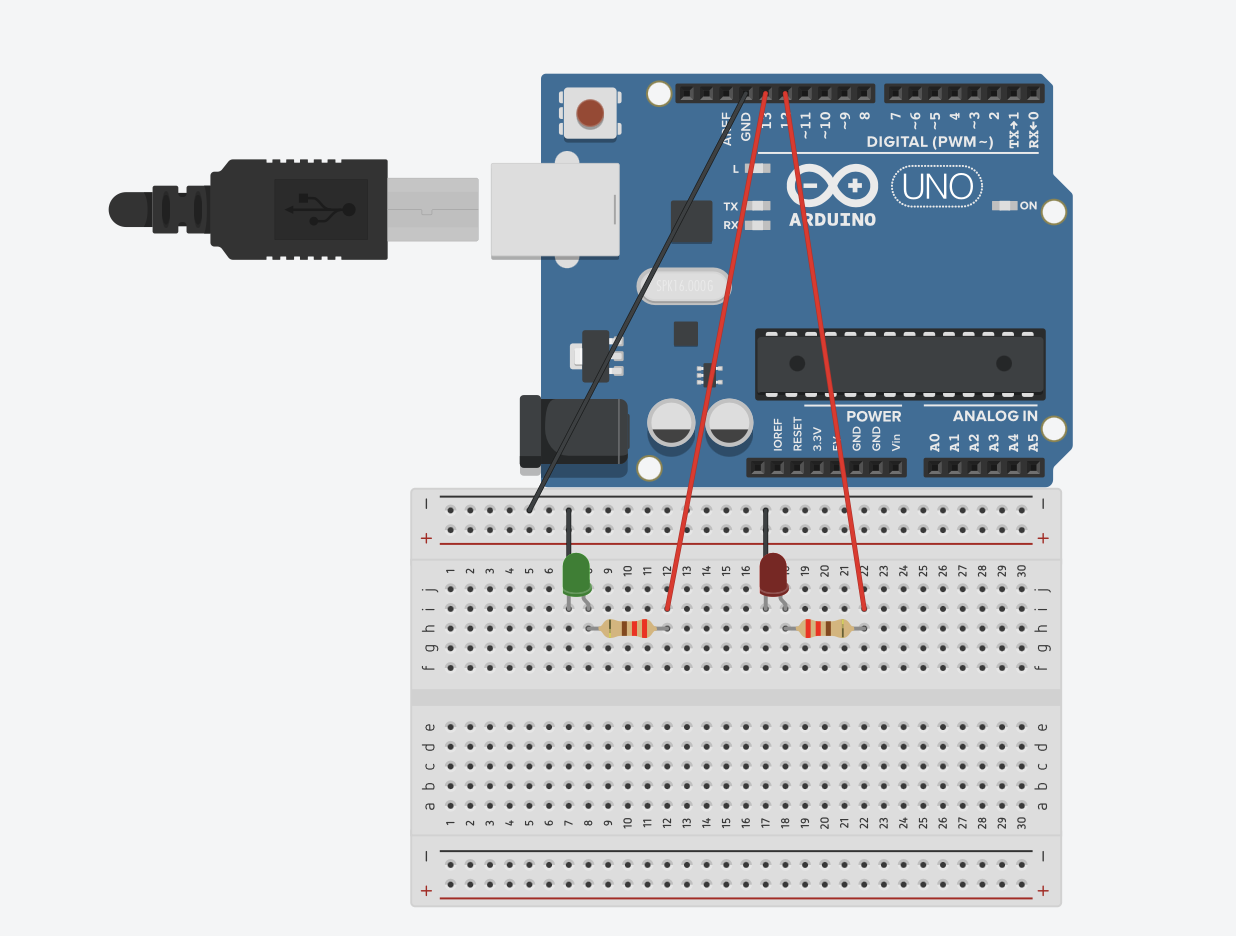
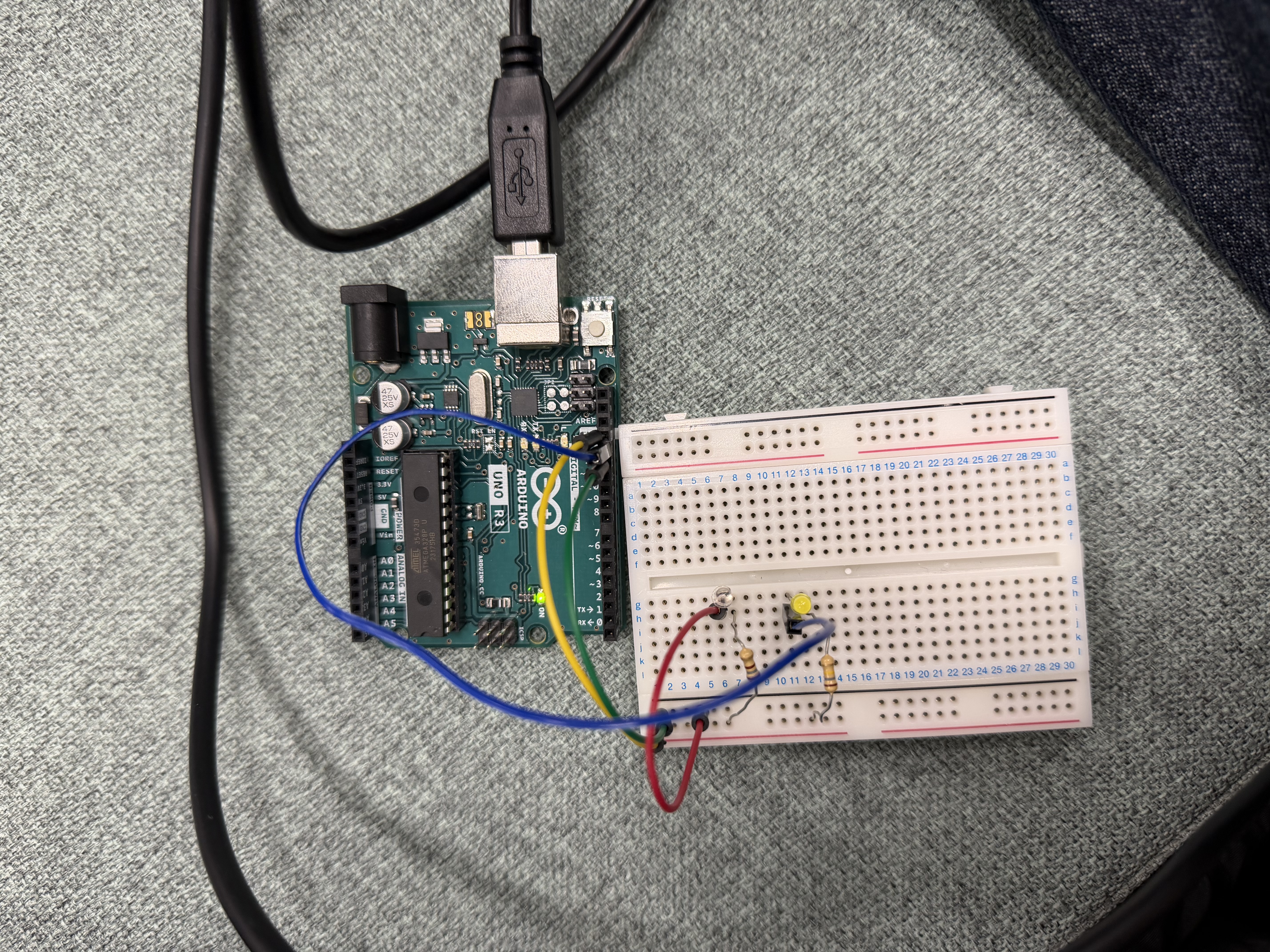
Montage du circuit
Étape 1 – Câblage
La borne GND de la carte Arduino est reliée à la ligne négative de la breadboard.
Pour chaque LED :
-
la patte courte (cathode) est connectée à la masse (GND),
-
la patte longue (anode) est reliée à une résistance de 220 Ω,
-
l’autre extrémité de la résistance est connectée à la broche numérique 13.
Les résistances permettent de limiter le courant traversant les LEDs afin de protéger les composants.
Étape 2 – Programmation
Le programme est structuré en deux parties :
-
setup(): configuration initiale, -
loop(): exécution répétée.
Dans la fonction setup(), la broche 13 est configurée en sortie :

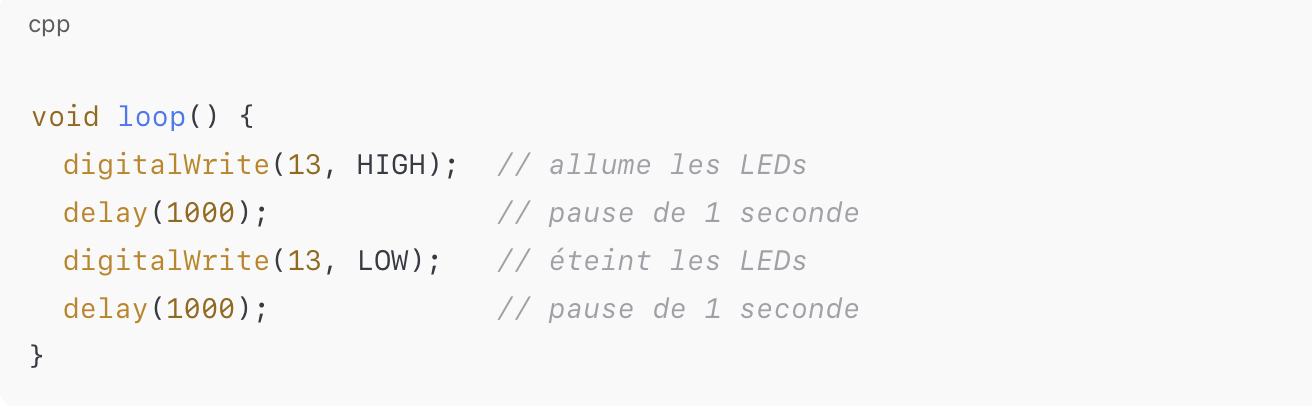
Dans la fonction loop(), la LED est activée puis désactivée avec un intervalle d’une seconde :
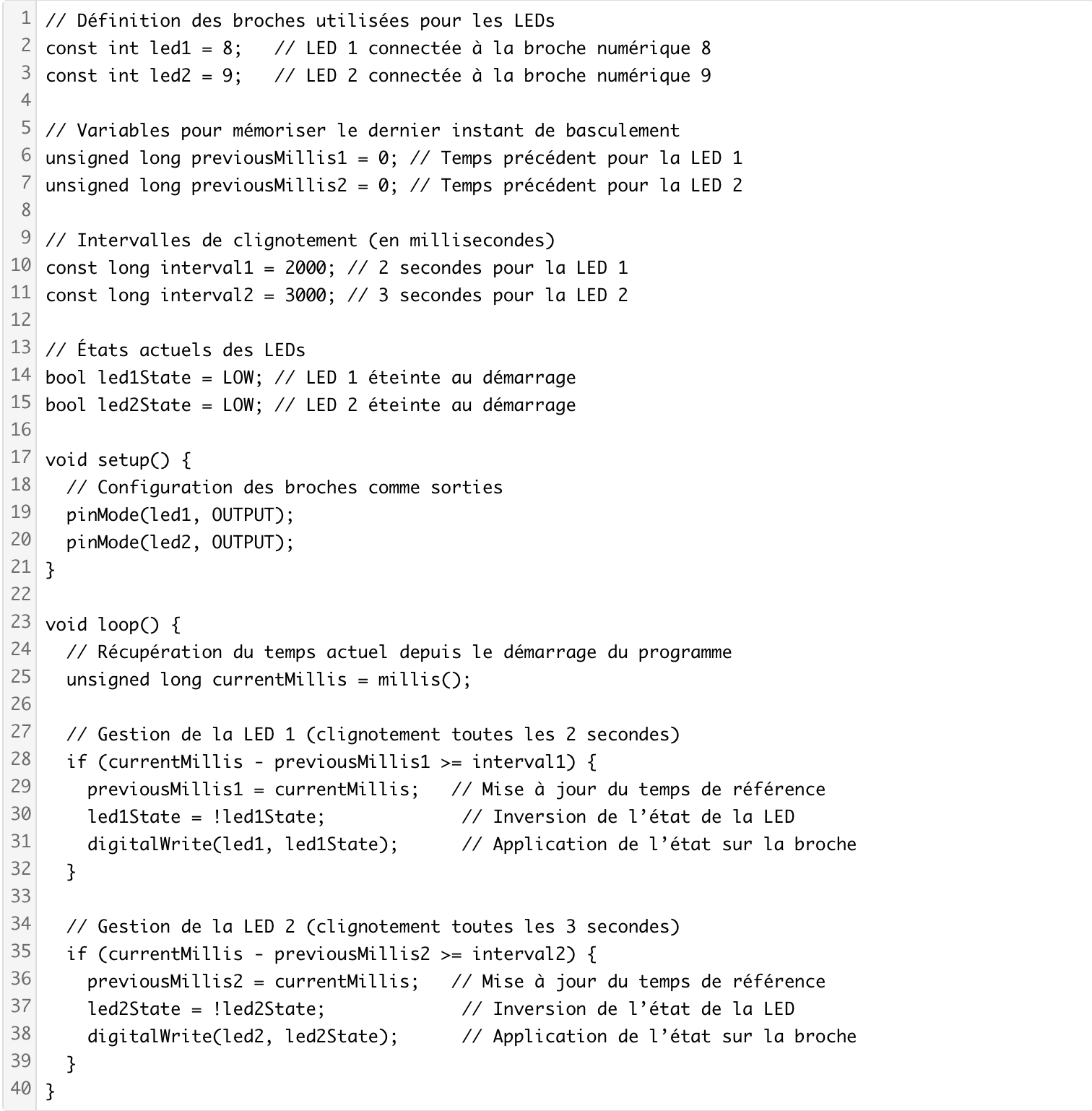
Le programme repose sur l’utilisation de la fonction millis(), qui retourne le nombre de millisecondes écoulées depuis le démarrage de la carte Arduino.
Deux temporisations indépendantes sont mises en place :
-
une pour la LED 1 (2000 ms),
-
une pour la LED 2 (3000 ms).
Chaque LED change d’état (ON/OFF) lorsque l’intervalle correspondant est écoulé, sans interrompre l’exécution du programme principal.
Résultat obtenu
Les deux LEDs s’allument et s’éteignent simultanément selon un cycle régulier d’une seconde.
Le montage fonctionne correctement et permet de comprendre le principe de base du contrôle d’une sortie numérique avec Arduino.
Exercice 4 : Clignotement de deux LEDs à fréquences différentes avec Arduino
Objectif
L’objectif de cet exercice est de programmer une carte Arduino afin de faire clignoter deux LEDs de manière alternée, chacune avec un intervalle de temps défini.
Contrairement à l’exercice précédent où les LEDs fonctionnaient simultanément, ici elles doivent s’allumer à tour de rôle.
Matériel utilisé
-
Carte Arduino Uno
-
2 LEDs
-
2 résistances de 220 Ω
-
Breadboard
-
Fils de connexion
-
Logiciel Arduino IDE
-
Simulateur TinkerCAD
Montage du circuit
Étape 1 – Câblage
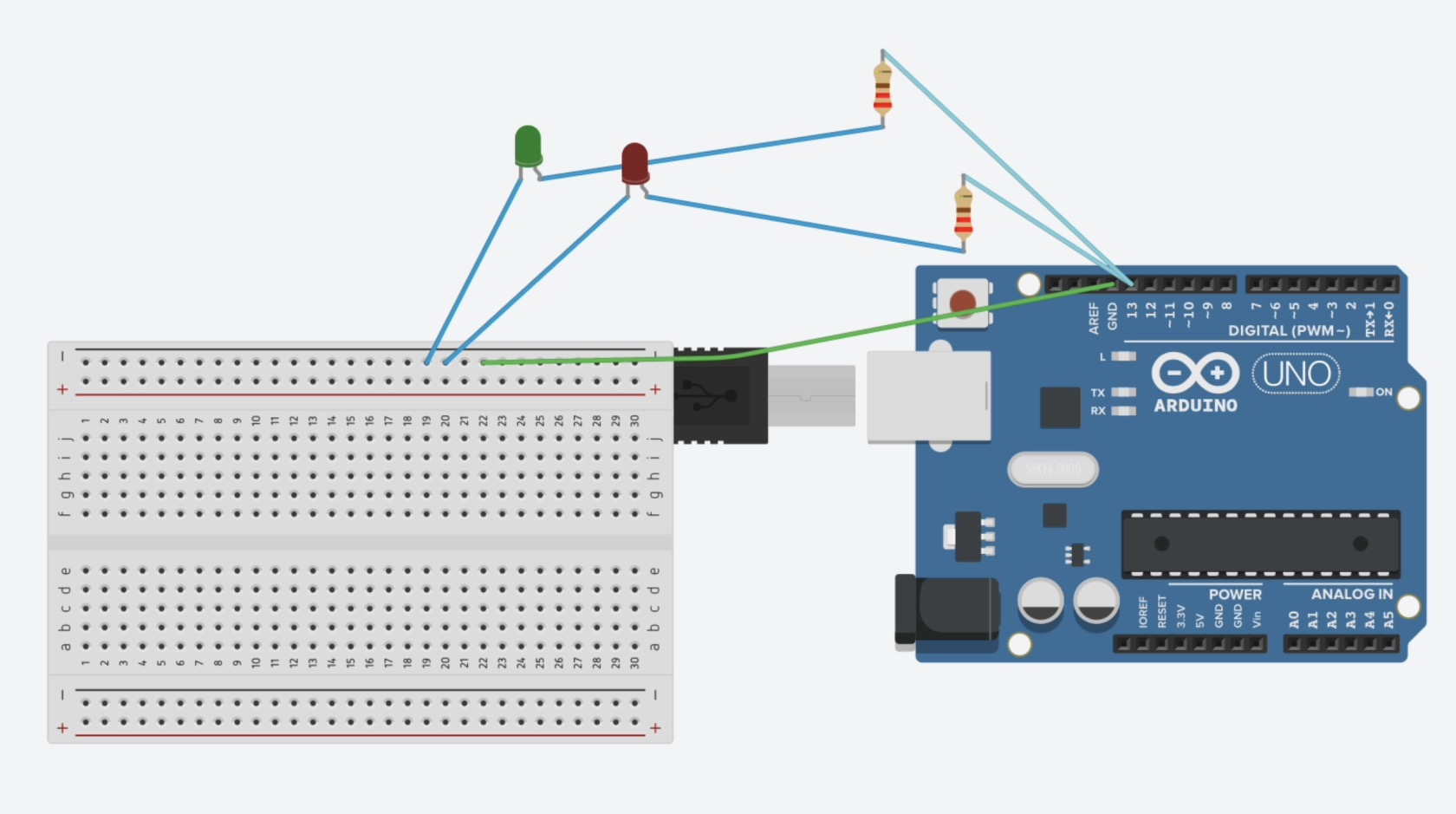
Le montage comprend deux LEDs reliées à deux sorties numériques différentes :
-
LED 1 connectée à la broche 13
-
LED 2 connectée à la broche 12
Chaque LED est montée en série avec une résistance de 220 Ω afin de limiter le courant et éviter toute détérioration.
Les cathodes des LEDs sont reliées à la masse (GND) de l’Arduino.
Ce choix de résistance est adapté à une alimentation de 5 V fournie par la carte Arduino.
Étape 2 – Programmation
Le programme commence par la déclaration des broches utilisées :

Dans la fonction setup(), les deux broches sont configurées en sortie :

Dans la boucle principale, les LEDs s’allument alternativement :
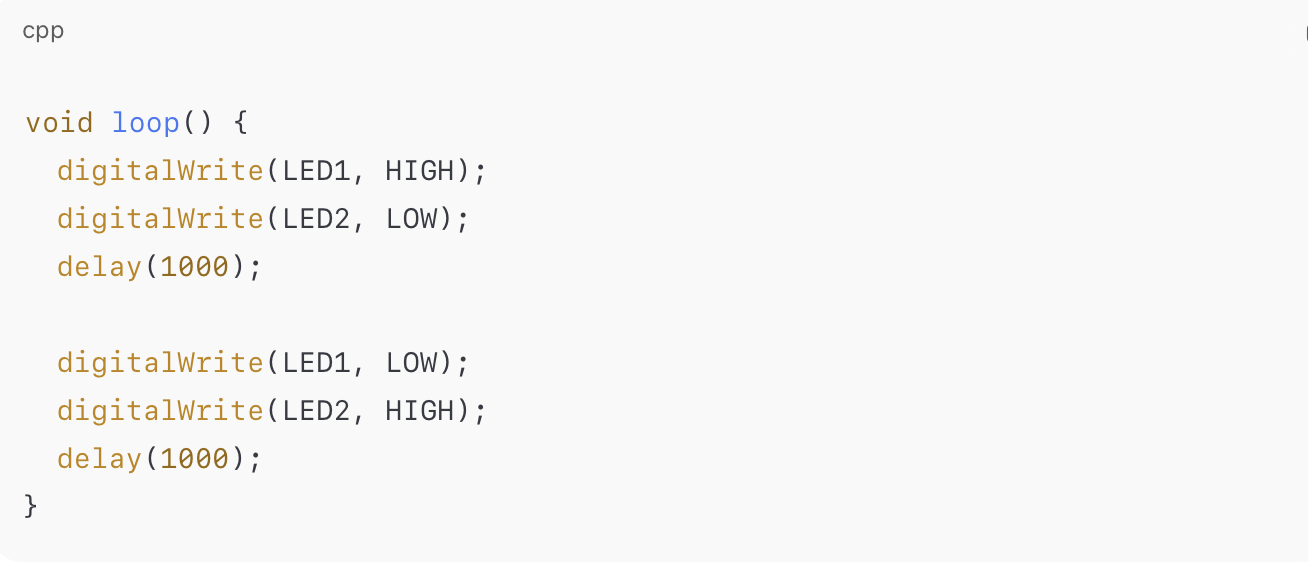
Code utilisé :

Résultat obtenu
Les deux LEDs clignotent de manière alternée avec un intervalle régulier d’une seconde.
Ce montage permet de comprendre la gestion de plusieurs sorties numériques indépendantes avec Arduino.
Analyse
Cet exercice met en évidence :
-
la configuration de plusieurs broches en sortie,
-
le contrôle indépendant de composants,
-
l’utilisation de temporisations simples via
delay().
Il constitue une étape intermédiaire avant l’utilisation de méthodes plus avancées comme millis() pour éviter les blocages du programme.
Exercice 5 : Capteur ultrasonique et signalisation par LEDs avec ARDUINO
Contexte
Cette activité visait à exploiter un capteur pour contrôler des dispositifs de sortie (LEDs) en fonction des mesures obtenues. Dans le respect des méthodes de travail apprises en électronique, une phase de simulation sur TinkerCAD a été réalisée avant toute manipulation matérielle.
Cette démarche présente plusieurs avantages :
-
vérifier la cohérence et la fiabilité du câblage du capteur ainsi que des LEDs ;
-
analyser et corriger la logique du programme avant l’implémentation réelle ;
-
limiter les risques d’erreur ou d’endommagement du matériel, notamment lorsqu’il est utilisé collectivement.
Objectif
L’objectif est d’utiliser un capteur ultrasonique HC-SR04 pour mesurer la distance d’un objet, puis d’afficher une signalisation visuelle via 3 LEDs selon des seuils de distance.
Cet exercice permet aussi de comprendre comment on passe du temps de propagation de l’onde sonore à une distance en cm.
Matériel
-
Arduino Uno
-
Capteur ultrasonique HC-SR04
-
3 LEDs
-
3 résistances 220 Ω
-
Breadboard + fils
-
Arduino IDE
-
(Optionnel) TinkerCAD
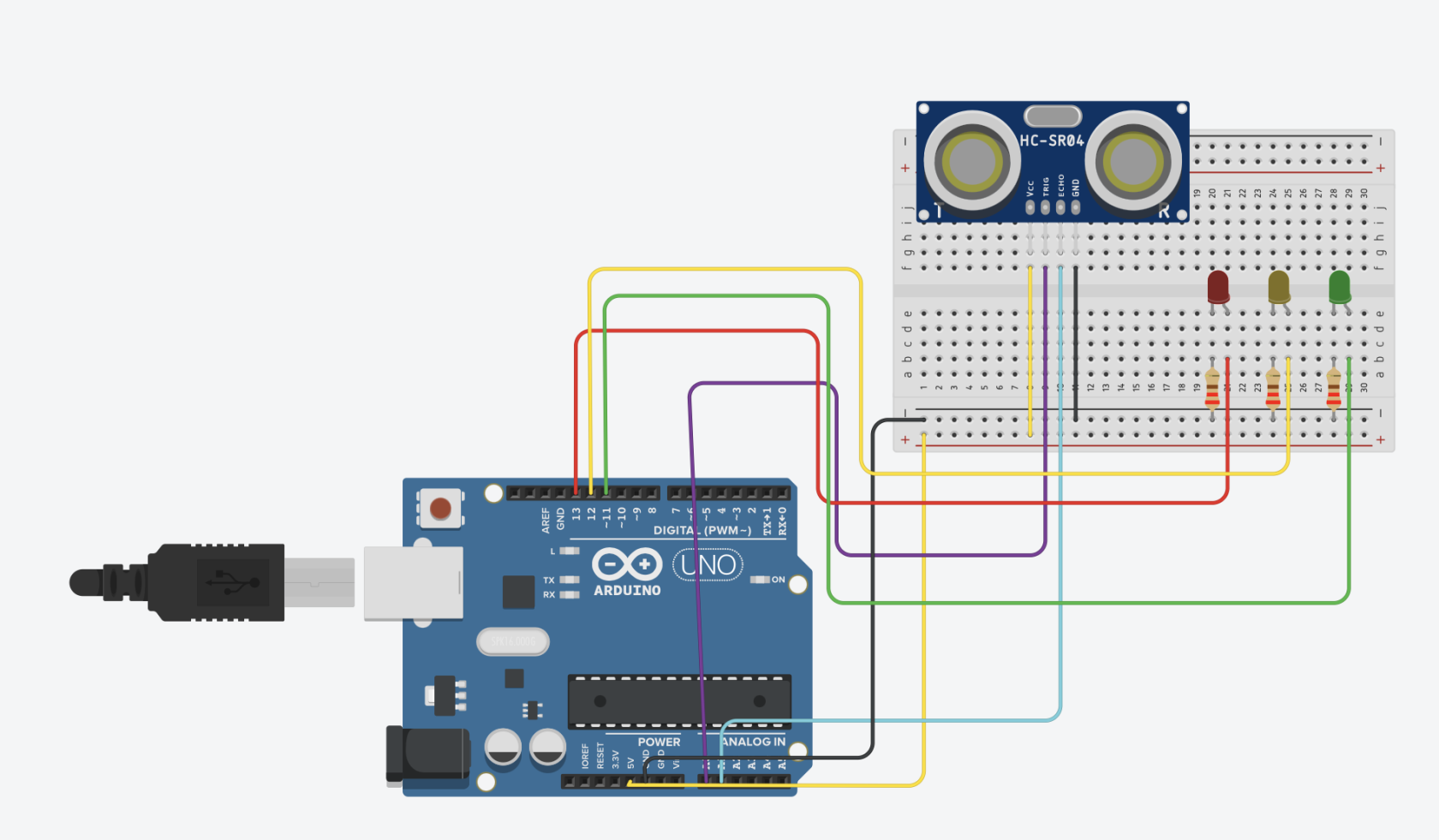
Montage du circuit
Étape 1 – Câblage
Capteur HC-SR04 :
-
VCC → 5V
-
GND → GND
-
TRIG → A0
-
ECHO → A1
LEDs :
-
LED1 → broche 11 (avec résistance 220 Ω)
-
LED2 → broche 12 (avec résistance 220 Ω)
-
LED3 → broche 13 (avec résistance 220 Ω)
-
Cathodes reliées au GND
Étape 2 – Programmation
Le programme :
-
Génère une impulsion sur la broche trigger.
-
Mesure la durée du signal reçu sur la broche echo.
-
Convertit cette durée en distance (cm).
-
Active une LED différente selon la distance mesurée :
-
Distance > 100 cm → LED 1
-
50 cm < Distance ≤ 100 cm → LED 2
-
20 cm < Distance ≤ 50 cm → LED 3
-
-
plus l’objet est proche, plus le temps de retour est court.
La distance est calculée par : -
distance_cm = (durée_en_microsecondes × 0,0343) / 2
(division par 2 car l’onde fait aller + retour).
Résultats :
Analyse
Le capteur ultrasonique HC-SR04 mesure la distance en envoyant une onde sonore et en calculant le temps nécessaire à son retour après réflexion sur un obstacle. Cette durée est convertie en distance grâce à la vitesse du son, en tenant compte du trajet aller-retour.
Le programme utilise des conditions (if) pour allumer une LED différente selon la distance mesurée. La simulation sur TinkerCAD a permis de vérifier le bon fonctionnement du câblage et de la logique avant la réalisation réelle.
Résultats obtenus
Le système a fonctionné correctement : les LEDs s’allument selon les seuils de distance définis dans le programme. Plus l’objet se rapproche, plus la LED correspondante change, ce qui permet une signalisation visuelle claire et cohérente de la distance mesurée.