Dual-Sandbox
Informations
- Contact :
- Fatih Yalcin (---)
- Judith Chevrel (judith.chevrel@etu.sorbonne-universite.fr)
- Cursus : L3 Licences de la Terre (LU3ST062)
- Encadrants :
- Responsables de l'UE : Fabrice Minoletti et Pierre Théry
- Responsable du projet : Pierre Théry
- Dates du projet : 30 janvier 2026 - mai 2026
Contexte
Quand on observe une coupe géologique, on observe la conséquence de mouvements tectoniques. Pour mieux comprendre comment ces mouvements tectoniques donnent naissance aux figures géologiques enregistrées, on peut créer des modèles qui reproduisent ces mouvements tectoniques sur des temps beaucoup plus courts.
Objectifs
Nous voulons créer un bac à sable pour observer les plissements tectoniques dans le cadre de manipulations pédagogiques. Plus précisément, il s'agit de créer un bac à sable qui permette d'exercer des forces de compressions ou d'extension de deux côtés. (les bacs à sable précédents n'exerçaient de force que dans un seul sens)
Matériel
- Plexiglas
- Verre
- Bois
Machines utilisées
- 2 Moteurs DC : DO 319.3860.3B.00 / 3124 (24V, 3A)
- 2 Transformateurs NDR-120-24
Composants à acheter éventuellement
- 2 * transistor IRLZ44NPBF 55V 47A
Construction
À venir...
Chantier Moteur (Fonctionnement + Fixation)
Moteur DC : utilisation de modulation de puissance (PWM) pour avoir des vitesses variables.
- Carte Arduino pour communiquer entre moteur et potentiomètre pour varier les vitesses
- Relais entre transformateur et carte Arduino (Moteur à 24V, Arduino à 5V) = Transformateur aussi
- Plaque d'essai pour Arduino
Chantier Étanchéité
Pièce flexible
Journal de bord
30/01/2026
1. Choix du matériel
Nous avons choisi les dimensions de la boîte du bac à sable à partir des plaques de plexiglas disponibles. Les moteurs que nous allons utiliser nous ont également été déjà fournis par notre responsable.
06/02/2026
1. Étude des chantiers à venir
Nous avons identifié les différents chantiers sur lesquels travailler :
- Contrôle du moteur DC (par PWM, via Arduino ; des transformateurs seront nécessaires car la carte Arduino ne peut pas travailler avec les tensions de 24 V assignées au moteur DC)
- Fixation du moteur : il faut décider du mode de fixation du moteur (probablement une sorte de cadre qui le maintiendrait)
- Étanchéité (éviter que des grains de sable restent bloqués contre le verre, derrière les plaques de bois) : peut-être une pièce flexible en caoutchouc comme ce qu'on trouve sur les pelles de balayettes
2. Travail sur la PWM avec Arduino
Essai de PWM avec un moteur DC 5V en utilisant un potentiomètre 50k. Le montage ne marchait pas, cela peut être dû à un mauvais branchement ou à un potentiomètre défaillant.
13/02/2026
Le but de cette séance est de comprendre pourquoi le montage de la dernière fois n'a pas fonctionné. Révision via un tutoriel Arduino.
- Le potentiomètre fonctionne bien (vérifié par un programme Arduino qui permet de lire les variations de tension induites par le potentiomètre)
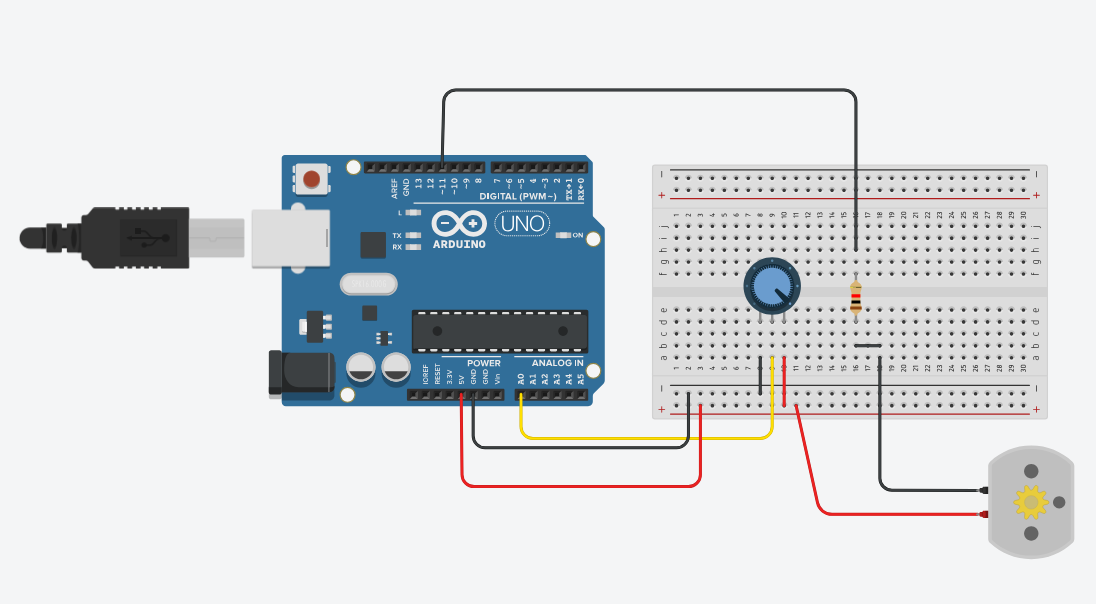
- Branchement qui fonctionne théoriquement (via tinkercad.com) : les variations de voltages induisent bien des variations de rotations par minutes (sans surcharge pour la carte UNO)
- Le branchement ne fonctionne pas dans la réalité (peut-être à cause de la résistance, qui ne laisse pas assez de courant passer)
Une piste pour contrôler le moteur en utilisant un Motor Shield
20/02/2026
- Utilisation du Motor Shield Rev3 pour contrôler le moteur DC 5V : montage beaucoup plus simple que sans shield. (la piste mentionnée précédemment a été fructueuse)
- Montage avec contrôle de la vitesse via potentiomètre
- Prochaine étape : adapter le montage pour le moteur DC 24V, 3A (6A au démarrage)
- Nous avons un transistor IRF520, mais qui ne tiendrait pas le courant du moteur.
- À la place, nous pensons utiliser un transistor IRLZ44NPBF 55V
47A.47A (s'il fonctionne avec PWM) - Les transformateurs NDR-120-24 (guide usager) à disposition vont nous servir à réduire la tension du secteur à un niveau utilisable pour le moteur. Nous allons étudier leurs branchements la prochaine fois.