Joaquin Austin/Gilles Sevignac/Lisa Goulvestre VALISEOUTE
Projet : Valiseouté - Mécanisme sur valise pour le suivi intelligent
Objectif :
L'objectif de ce projet est de créer un système se fixant à différentes tailles de valises permettant le suivi du propriétaire de la valise. Cela permet de ne pas perdre la valise qui nous suit, ainsi que de moins se fatiguer a la porter. Ce système est adapté aux gens nomades, les personnes à mobilité réduite, les personnes âgées ou encore les personnes souhaitant les dernières innovations pour s'inscrite dans le changement.
Matériel utilisé :
Pour ce projet, nous avons utilisé les composants suivants :
- Une carte Arduino Uno
- 3 capteurs de distance Ultrasonic Distance Sensor level 3
- Du PLA pour la réalisation 3D
- 2 moteurs DAGU robot
- Des fils de connexion pour connecter les composants entre eux
- 4 piles AA 1.5 volt
- un sangle
- une valise
- la voiture
Le circuit :
Le code :
La modélisation 3D :
Nous avons utilisé AutoDesk Fusion 360. 2 éléments on été réalisé par impression 3D : Le boitier contenant les capteurs de distances a l'avant de la valise et 2 L permettant le maintient autour de la valise ainsi que l'adaptation aux différentes tailles de valise.
Pour le boitier à capteur :
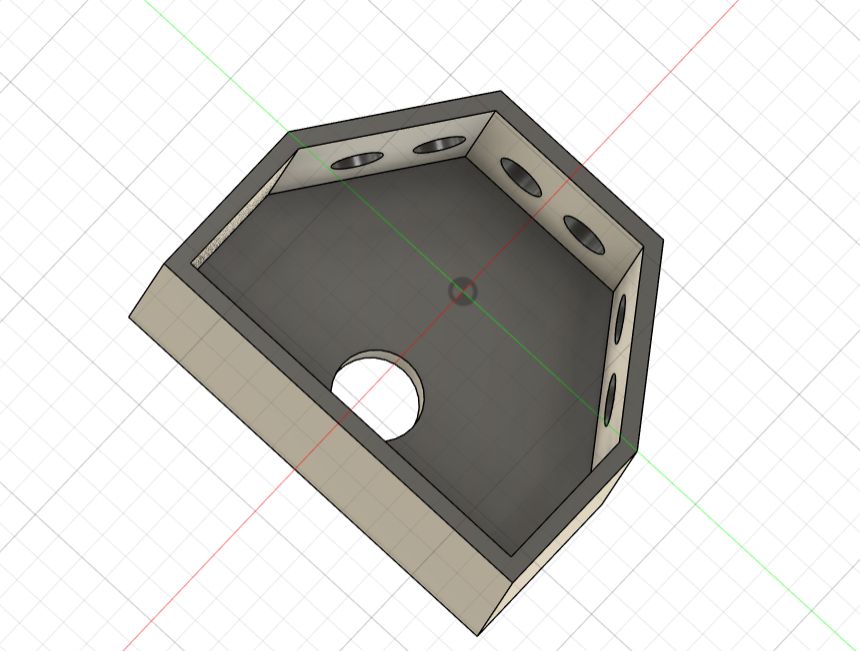
Le boitier était inutilement trop grand donc nous avons decidé de reduire celui-ci.
Difficultés rencontrées :
La création du code nécessitait plusieurs rectifications car initialement il évitait la personnes devant au lieu de la suivre. Les branchements présentaient des problèmes pour relier les piles au moteur et avoir assez de puissance.
Modification du model 3D pour adapter sa taille
- explications des choix techniques
- gestion de projet : "minimum viable product", planification et répartition des taches
- croquis, dimensions
- fichiers de conception et étapes de création des fichiers (captures d'écran)
- photos/vidéos et analyse des tests, essais, erreurs
- photos/vidéos des étapes de réalisation du prototype, paramètres des machines
- photos/vidéos de l'objet final
- réflexions de pistes d'amélioration ou d'évolution du projet
- sources des tutoriels, inspirations, ressources utilisées (à insérer au fil de la documentation)