Projet Final - Joaquin Austin/Gilles Sevignac/Lisa Goulvestre VALISEOUTE
Projet : Valiseouté - Mécanisme sur valise pour le suivi intelligent
Objectif :
L'objectif de ce projet est de créer un système se fixant à différentes tailles de valises permettant le suivi du propriétaire de la valise. Cela permet de ne pas perdre la valise qui nous suit, ainsi que de moins se fatiguer a la porter. Ce système est adapté aux gens nomades, les personnes à mobilité réduite, les personnes âgées ou encore les personnes souhaitant les dernières innovations ou plus de confort.
Inspiration : Nous sommes 3 jeunes voyageant régulièrement et aillant déjà voulu avoir ce confort.
Fonctionnalité clés :
- Suivi fiable de l'utilisateur
- Bonne puissance pour
s'inscriteporterdansune valise - Bonne autonomie
Veille sur l'existant :
- Travelmate Robotics – modèle
changement.Travelmate- Valise robotisée qui suit son propriétaire grâce à des capteurs et une application mobile
- Vitesse d’environ 6 km/h, évitement d’obstacles
- Cowarobot – modèle Cowarobot R1
- Suit l’utilisateur via un bracelet connecté
- Équipée de GPS, capteurs (sonar, profondeur) et détection d’obstacles
- Airwheel – modèles SR3 et SR5
- Suivi automatique grâce à la reconnaissance visuelle
- Maintien d’une distance avec l’utilisateur + évitement intelligent d’obstacles
Ce qu'il faut retenir,
Le marché existe déjà avec quelques startups et marques tech, mais reste encore limité. Ce sont souvent des prototypes ou produits peu diffusés, encore en phase d’innovation. Leurs principaux défauts sont : l'autonomie limité avec la batterie, des échecs en environnement réel avec des obstacles type trottoirs, une vitesse limitée, une dépendance a un système de suivi, un poids plus élevé s'il faut la porter, un prix élevé et des contraintes règlementaires si la valise possède une batterie en lithium par exemple.
Cible d'usage :
- Gens nomades : voyageant régulièrement et nécessitant confort
- Les personnes à mobilité réduite : nécessitant praticité et mains libres
- Les personnes âgées : nécessitant praticité et allègement de poids
- Les personnes souhaitant les dernières innovations ou plus de confort
Gestion de projet :
|
Nom Prénom |
Rôle |
| Savignac Gilles | Modélisation 3D + éléctronique |
| Austin Joaquin | Découpe laser + éléctronique |
| Goulvestre Lisa | Modélisation 3D + Rédaction |
Planning ->
| S1 | Création du code |
| S2 | Amélioration du code en testant avec les capteurs reçu |
| S3 | Premières modélisation 3D |
| S4 | Impression 3D |
| S4 | Connexion fils et premiers tests sans valise |
| S5 | Assemblage final |
Matériel utilisé :
Pour ce projet, nous avons utilisé les composants suivants :
UnecarteNom
Quantité
Prix estimé Carte Arduino Uno 31 capteurs~10€ Capteur de distance Ultrasonic Distance Sensor level 3 Du3 - PLA pour la réalisation 3D 2- moteurs~2€ Moteur DAGU robot Des2 fils~15€ Fils de connexion pour connecter les composants entre eux
4piles12 ~1€ Piles AA 1.5 volt un4 sangle~2€ unevaliselaSangle voiture2 ~2€ Valise 1 - La board 1 - Driver DR10009 DFROBOT 2A Motor shield for Arduino 1 ~10€ Roue 2 inclue dans prix moteur - explications des choix techniques
gestion de projet : "minimum viable product", planification et répartition des taches- croquis, dimensions
- fichiers de conception et étapes de création des fichiers (captures d'écran)
photos/vidéos et analyse des tests, essais, erreurs- photos/vidéos des étapes de réalisation du prototype, paramètres des machines
photos/vidéos de l'objet final- réflexions de pistes d'amélioration ou d'évolution du projet
- sources des tutoriels, inspirations, ressources utilisées (à insérer au fil de la documentation)
Le circuit :
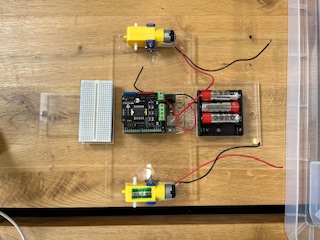
Base iniatiale : V3 Base améliorée V4 :
Le code :
La modélisation 3D :
Nous avons utilisé AutoDesk Fusion 360. 2 éléments on été réalisé par impression 3D : Le boitier contenant les capteurs de distances a l'avant de la valise et 2 L étants les sabots permettant le maintient autour de la valise ainsi que l'adaptation aux différentes tailles de valise. Toutes les impressions 3D ont été réalisées en PLA.
Pour le boitier à capteur :
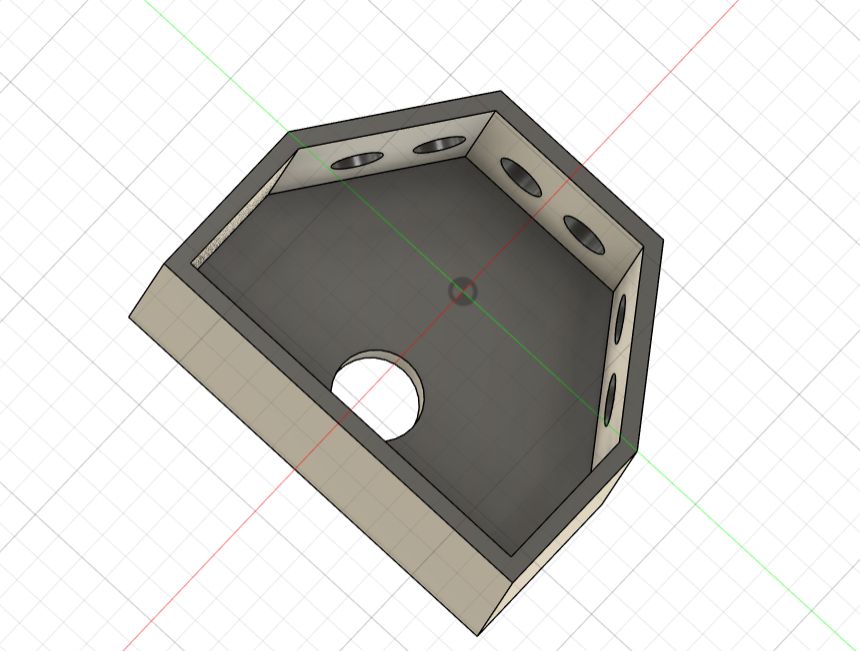 n°1
n°1 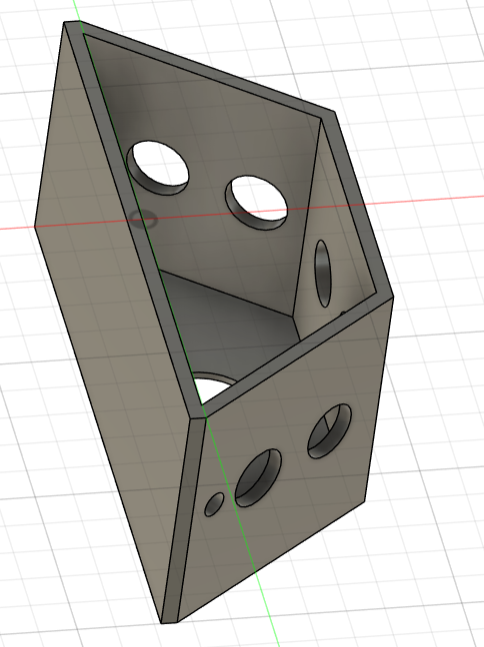 n°2
n°2Le boitier n°1 était inutilement trop grand donc nous avons décidé de réduire celui-ci pour obtenir le modèle n°2. Nous en avons profité pour ajouter des trous sur les cotés pour attacher une seconde sangle et améliorer le maintien ainsi que réduire les épaisseurs pour diminuer le temps d'impression. Les étapes éffectuée ont été le dessins de l'esquisse > extrusion > perçage x6 > contraindre les cercles pour avoir le bon espacement > esquisse d'un couvercle > extrusion du couvercle.
Résultat final :

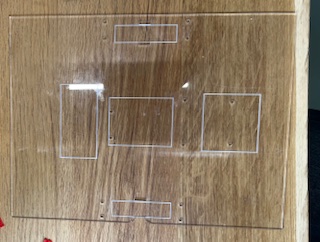
Les sabots :

Le design :

Difficultés rencontrées :
La création du code nécessitait plusieurs rectifications car initialement il évitait la personnes devant au lieu de la suivre. Les branchements présentaient des problèmes pour relier les piles au moteur et avoir assez de puissance.
Modification duLe model 3D à été modifié pour adapter sa tailletaille.
ESSAI N°1 : Lors du premier test, la valise n'avançait pas par manque de puissance (les roues ne tournent pas). Voici une image du premier essai avec le produit fini :
ESSAI N°2 : Une pile de 9V à remplacé les 4 piles de 1.5V et la puissance a été nettement améliorée mais la valise n'avance toujours pas. Les roues tournent maintenant.
ESSAI N°3 :