Projet : Nettoyage en place automatisé
Membres du projet : InèInès Dridi, Abdelkerim Hissein, Riad Aberkane, Yousra Lasmi
Promotion : M2 Chimie parcours IngéIngénierie Chimique
Date de dédébut du projet : 14 octobre 2025
Date de fin estiméestimée du projet : janvier 2025
1. INTRODUCTION :
Le projet «« NEP automatiséautomatisé »» consiste àà concevoir un prototype de systèsystème de nettoyage en place àà ééchelle réréduite, pilotépiloté par une carte Arduino Uno. L’L’objectif est de reproduire, de manièmanière pépédagogique, automatiséautomatisée et sécurisésécurisée, un procédéprocédé industriel de nettoyage des ééquipements de procédéprocédé (cuves, tuyauteries) en utilisant uniquement des produits non dangereux et alimentaires (eau, vinaigre blanc et liquide vaisselle). Dans un contexte industriel, la maîmaîtrise des opéopérations de nettoyage est essentielle pour garantir la qualitéqualité des productions, limiter les contaminations croisécroisées en réréduisant les interventions manuelles et optimiser la consommation d’d’eau.
Pour des raisons de temps et de difficultédifficulté, nous avons simplifiésimplifié le sujet avec Monsieur Pulpytel : Le projet consiste maintenant àà concevoir et automatiser un procédéprocédé expéexpérimental ayant pour objectif d’éd’étudier l’efficacitél’efficacité de cycles successifs de lavage àà l’l’eau d’d’une cuve contenant initialement du chlorure de sodium (NaCl). L’L’enjeu principal est de dédéterminer, de manièmanière automatique, aprèaprès combien de cycles de nettoyage la cuve peut êêtre considéréconsidérée comme propre, c’c’est-àà-dire lorsque la conductivitéconductivité de l'eau de nettoyage devient inféinférieure àà un seuil dédéfini.
2. MATÉMATÉRIEL UTILISÉUTILISÉ :
2.1 RéRéactifs
Les réréactifs de ce procédéprocédé sont le chlorure de sodium NaCl et l’l’eau :
- NaCL est introduit manuellement dans la cuve au dédébut du procédéprocédé et se dissout dans l’l’eau lors des cycles de remplissage grâgrâce àà l'agitation. Son éélimination est suivie par la mesure de la conductivitéconductivité de la solution de nettoyage, proportionnelle àà la concentration ionique.
- l'eau est l’l’unique agent de lavage stockéstocké dans un bac et envoyéenvoyé par une pompe dans la cuve contenant NaCl.
2.2 Composants du procédéprocédé
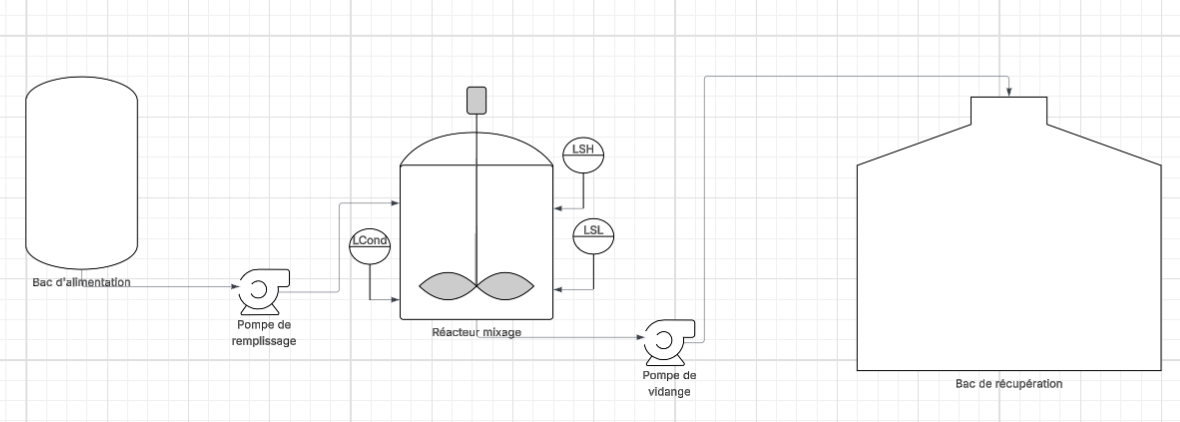
- Cuve repréreprésentant un réréacteur : petit rérécipient oùoù l’l’on introduit le NaCl. La cuve est équipééquipée d’d’un dédétecteur de niveau bas (LSL) et d’d’un dédétecteur de niveau haut (LSH).
- Bac d’d’alimentation en eau : AlimentéAlimenté manuellement, il contient l’l’eau destinédestinée au remplissage de la cuve.
- Bac de récupérécupération : RécupèRécupère les eaux de nettoyage issues de la vidange.
- Pompes de 12V :
- P1 : Pompe de remplissage permettant de
transfétransférerl’l’eau propre du bacd’d’alimentation vers la cuve. - P2 : Pompe de vidange permettant de vidanger la cuve vers le bac de
récupérécupération etentraîentraînel’l’effluent vers leconductimèconductimètre.
- Capteurs de niveau :
- LSH : Level Switch High qui
dédétecte le niveau haut dans la cuve→→arrêarrêt du remplissage. - LSL : Level Switch Low qui
dédétecte le niveau bas→→arrêarrêt de la vidange etdédéclenchement de la mesure deconductivitéconductivité.
- ConductimèConductimètre : le conductimèconductimètre est placéplacé dans le réréacteur, il mesure la conductivitéconductivité de la solution, indicateur direct de la concentration en NaCl. Il sert ainsi de critècritère final d’arrêd’arrêt du procédéprocédé lorsque la valeur mesurémesurée devient inféinférieure ou éégale au seuil de propretépropreté.
- Un Arduino Uno, un module relais et un éécran LCD pour le contrôcontrôle et le suivi.
3. AVANCEMENT DU PROJET
- 14 octobre 2025 –– Choix du sujetL’éL’équipe a sélectionnésélectionné le thèthème du projet, portant sur la conception et l’l’automatisation d’d’un systèsystème de rinçrinçage àà l’l’eau et de nettoyage au liquide vaisselle et au vinaigre banc.
- 17 octobre 2025 –– Envoi du sujet retenu
Le choix final du sujet a étéété transmis àà l’l’enseignant pour validation.
- 24 octobre 2025 –– SéSélection des composants
Remise du document recensant l’l’ensemble des composants nénécessaires, accompagnéaccompagnés de leurs spéspécifications techniques détaillédétaillées ainsi que des fournisseurs référencéréférencés.
- 27 au 31 octobre 2025 –– ÉÉlaboration du P&ID et du GRAFCET
Production des premièpremières versions du schéschéma d’d’instrumentation (P&ID) et du GRAFCET dédéfinissant le cycle automatiséautomatisé.
- 7 novembre 2025 –– Organisation du travail au FabLabRéRépartition de l’él’équipe en binôbinômes afin d’d’optimiser la préprésence lors des crécréneaux disponibles au FabLab :•• un groupe assignéassigné au mardi aprèaprès-midi,•• un second groupe assignéassigné au jeudi aprèaprès-midi.
- 17 novembre 2025 –– RécupéRécupération du matématériel et ééchanges techniques
Collecte des diffédifférents élééléments matématériels, inscription au FabLab et ajustements du procédéprocédé suite aux remarques et recommandations de Monsieur Pulpytel.
-
–– Finalisation des documents techniquesÉÉtablissement des versions finales du P&ID et du GRAFCET,intéintégrant toutes les modificationsdemandédemandées :Explication du Fonctionnement du
systèsystème : lien entre GRAFCET et P&ID-
VéVérification del’l’alimentation en eauS’S’assurer que la cuved’d’alimentation est correctement remplie avec del’l’eau propredestinédestinée au cycle de nettoyage.-
SéSécurisation del’l’installation
Confirmer quel’l’ensemble des pompes estààl’arrêl’arrêt avant le lancement de laprocéprocédure. -
ContrôContrôle del’él’état duréréacteurVéVérifier que leréréacteur estentièentièrement vide. Le niveau bas (LSL) doit indiquer 0, signifiantl’l’absenced’d’eaurérésiduelle. -
Lancement du cycle de nettoyage
-
Mettre en marche la pompe
d’d’alimentation (Pompe 1). -
Maintenir la pompe
d’éd’évacuation (Pompe 2)ferméfermée.
Leréréacteur se remplitjusqu’àjusqu’à atteindre le niveau haut (LSH).ÀÀ ce seuil,arrêarrêter la Pompe 1.
-
-
Phase
d’d’agitation
Activer lesystèsystèmed’d’agitation afind’d’assurer une solubilisation desdépôdépôts de sel.L’L’agitation est maintenue pendant uneduréduréedédéfinie. -
ArrêArrêt del’l’agitation
Une fois le temps de brassageécouléécoulé,arrêarrêter le dispositifd’d’agitation. -
Mesure de la
conductivitéconductivité in situ
Effectuer une mesure deconductivitéconductivité directement dans leréréacteur afind’éd’évaluer la concentrationrérésiduelle en sel dissous. -
Vidange du
réréacteur-
Ouvrir la Pompe 2 pour
procéprocéderàà la vidangecomplècomplète. -
ArrêArrêter la vidange lorsque le niveau bas (LSL = 0) estdétectédétecté.
-
-
ÉÉvaluation de laqualitéqualité du nettoyage
Comparer laconductivitéconductivitémesurémesurée avec la valeur deréféréférence.-
Si la
conductivitéconductivité estsupésupérieure au seuildédéfini, un nouveau cycle de nettoyage est automatiquementdéclenchédéclenché. -
Si la
conductivitéconductivité estinféinférieure ouéégale au seuil, lesystèsystèmes’arrês’arrête : le nettoyage estconsidéréconsidéré comme conforme.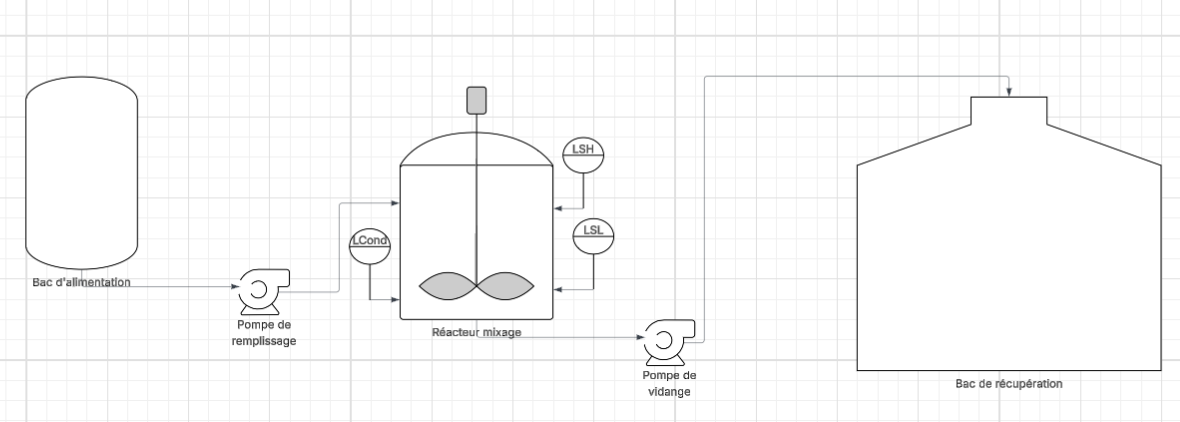
-
--
- 27 novembre 2025:
Impression 3D de l'agitateur au Fablab
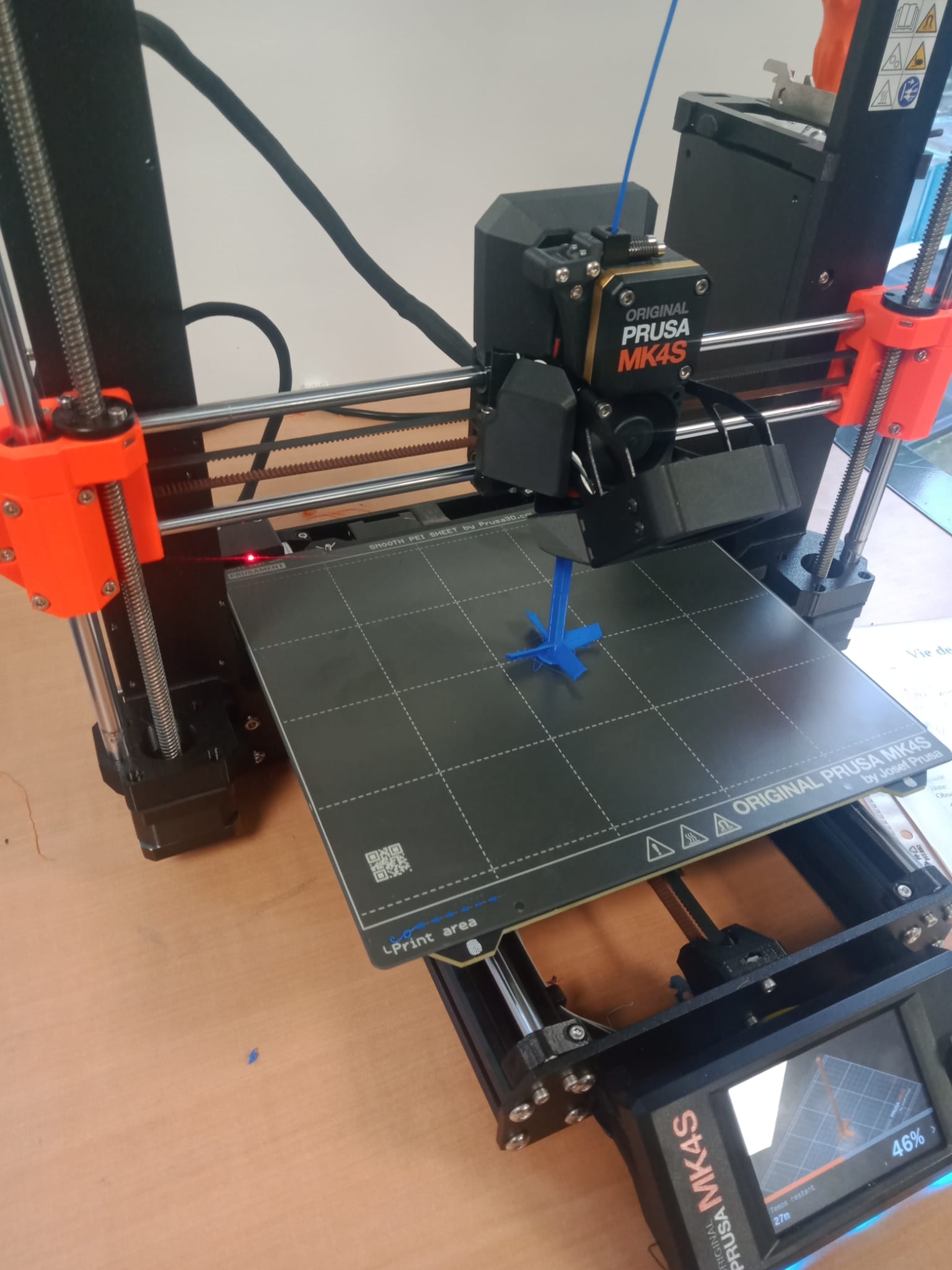
- 27 novembre 2025 - Tentatives et ajustements de l’l’impression 3D de l’l’agitateur Au cours de cette séséance au FabLab, nous avons procédéprocédé àà l’l’impression 3D de l’l’agitateur destinédestiné àà êêtre fixéfixé sur l’l’axe du moteur. Une premièpremière impression a étéété lancélancée sur l’l’imprimante Prusa MK4S, mais celle-ci n’n’a pas abouti : le filament ne s’s’est pas correctement déposédéposé, entraîentraînant une pièpièce instable, partiellement fondue et déformédéformée, comme en tétémoignent les rérésidus visibles sur la plaque d’d’impression.

AprèAprès analyse, nous avons conclu que le dédéfaut provenait de paramèparamètres inadaptéinadaptés, notamment une rigiditérigidité trop faible et l’l’absence de supports pour maintenir la géomégéométrie de la pièpièce.
ÀÀ la suite de cet essai infructueux, nous avons décidédécidé d’d’ajuster les paramèparamètres pour la seconde impression :
- augmenter la
rigiditérigidité dumodèmodèleàà 20 %, - ajouter des supports
d’d’impression, vévérifierl’adhél’adhérence du plateau et latempétempérature du filament.

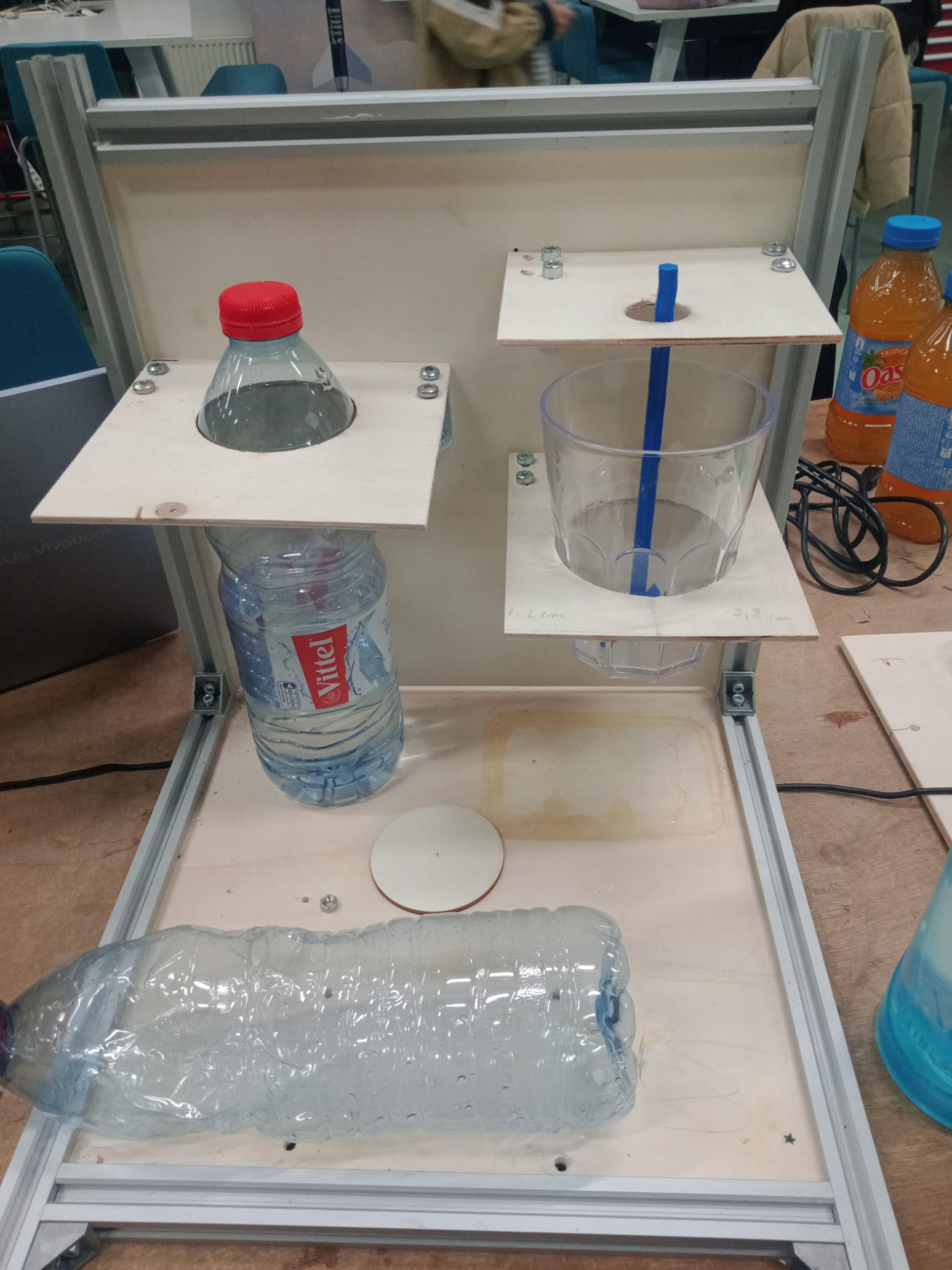
- 3 dédécembre 2025 - RéRéalisation du montage mémécanique et premièpremières éétapes d’d’assemblage Lors de cette séséance, nous avons commencécommencé la construction physique du dispositif. Nous avons découpédécoupé les diffédifférentes plaques de support, percépercé les ouvertures nénécessaires àà l’l’installation du moteur et de la cuve, puis assembléassemblé les élééléments sur la structure en aluminium.

Le moteur a étéété fixéfixé sur une platine supésupérieure, tandis que la cuve a étéété positionnépositionnée sur un support interméintermédiaire afin de reproduire l’l’architecture préprévue dans le P&ID. Cette séséance a permis de vévérifier l’l’alignement entre le moteur, l’l’axe et la cuve et de confirmer la faisabilitéfaisabilité du systèsystème avant l’intél’intégration des capteurs et de l’l’automatisation.

- 505 dédécembre 2025
éLors de l’utilisation d’un écran LCD I2C (Grove LCD RGB Backlight V4.0) avec une carte Arduino, l’écran s’allumait mais n’affichait aucun texte.
Les tests avec un scanner I2C n’ont détecté aucune adresse, malgré un câblage correct et un programme fonctionnel.
Cela indique un problème matériel de communication I2C (module LCD ou carte Arduino défectueux).
- 8 dédécembre 2025 - IntéIntégration d’d’une premièpremière pompe et prépréparation du bac d’d’alimentation Lors de cette séséance, nous nous sommes concentréconcentrés sur l’intél’intégration de la premièpremière pompe et sur l’l’emplacement optimal du bac d’d’alimentation en eau et de la pompe. Il faut s’s’assurer un transfert fluide entre le bac d’d’alimentation et la cuve, tout en tenant compte des contraintes d’d’encombrement et de passage des tuyaux. AprèAprès repérepérage, nous avons percépercé les ouvertures nénécessaires pour le passage des câcâbles et des conduites.
Nous avons éégalement choisi de fixer la pompe àà l’l’aide de rizlans, laissants la possibilitépossibilité d’d’ajuster la position de la pompe ultéultérieurement sans percer de nouvelles pièpièces ni risquer d’d’endommager l’l’ensemble. Pour fixer le bac d’d’alimentation, nous avons découpédécoupé un support muni d’d’un trou circulaire de 68 mm de diamèdiamètre. Ce trou, calibrécalibré au laser, permet d’inséd’insérer et maintenir une bouteille en position verticale, tout en garantissant sa stabilitéstabilité durant les opéopérations de remplissage.
-11dédécembre 2025 -Remplacement de l'
éécran LCD etde l'ArduinoMontagemontage du dispositif (suite)
Après le problème rencontré avec l'écran LCD, Il a été finalement décidé de le remplacer l'écran LCD ainsi que l'Arduino.
Durant cette séance, nous avons également poursuivi notre travail sur le montage du dispositif expérimental.