Projet Rob3 - Cléo, Léon, Adam, Anass, Valentin, Marianne
Objectif Général
Séance 1 12/02/2026
Dans le cadre de notre première séance, on s'est familiarisé avec le projet en main. On a réparti les rôles pour une résolution ordonnée du problème :
Chef de projet : Cleo SAUVENAY,
Responsable du Wiki : Marianne RODRIGUEZ,
Responsable informatique : Valentin BOUR,
Responsable mécanique : Adam ABDENNADHER,
Responsable électronique : Léon CHERPITEL,
Pôle Mécanique
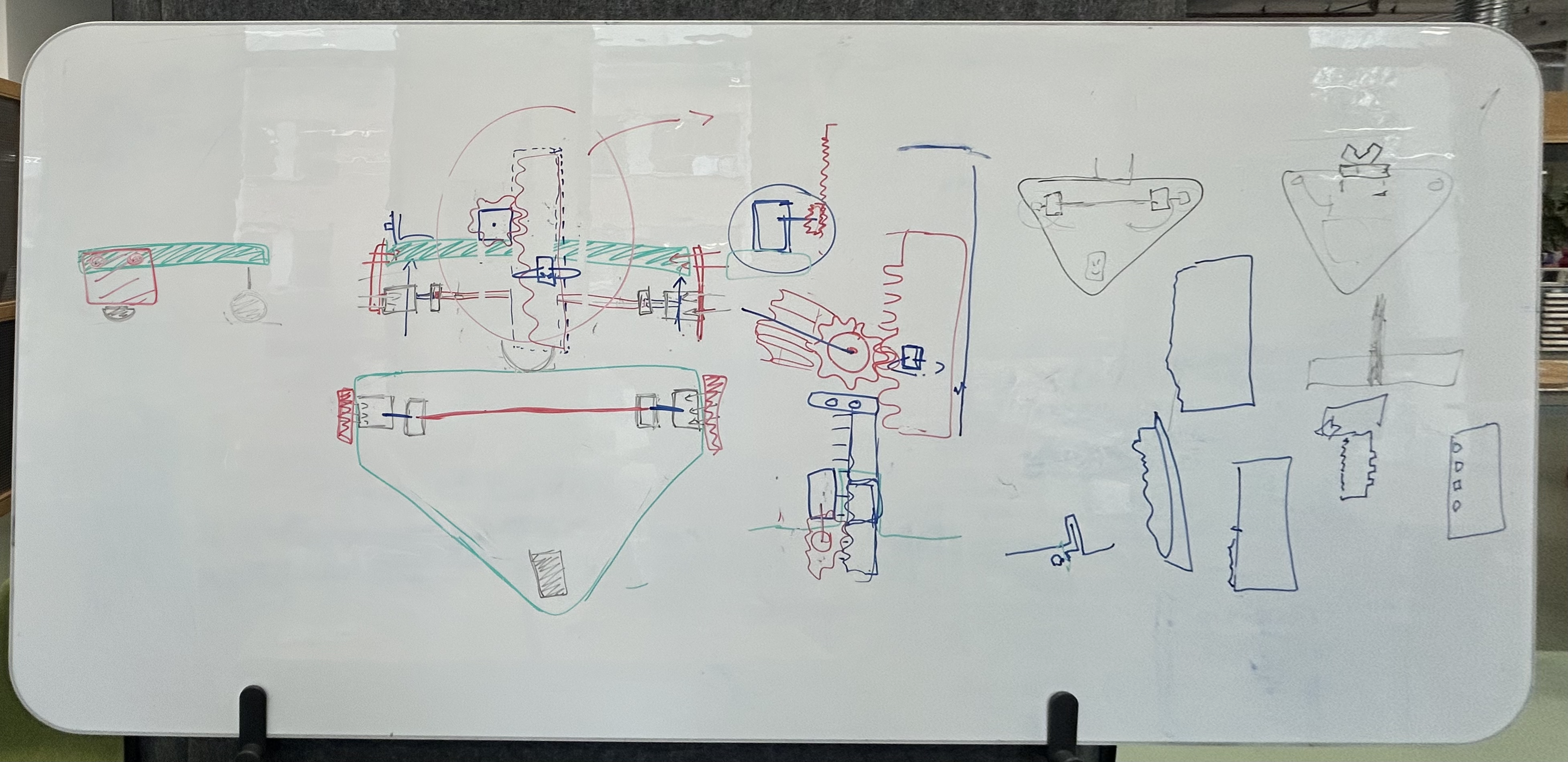
Travail réalisé : On a commencé la modélisation du robot par un dessin de châssis simple et un positionnement de roues. Nous avons opté pour un châssis de forme triangulaire avec deux pointes carrées où l'on va pouvoir fixer deux plaques perpendiculaires aux chassis, pour pouvoir fixer les deux moteurs des roues, et dans la pointe du triangle pouvoir fixer la roue folle. Dans le dessin nous avons dessiné une tige qui viendrait assurer que les deux roues soient dans le même axe, cependant, pour assurer que le robot puisse tourner, il se peut que cette tige n'apparaisse pas dans le modèle final, ou simplement on fera en sorte qu'il y ait suffisamment de jeu pour assurer le mouvement souhaité. Pour l'installation de la pincepince, on a prévu un système pignon-crémaillère. Il suffirait de prévoir une encoche où l'on mettra une plaque avec des dents, qui vont se fixer sur une roue dentée (fixée à la sortie du moteur de pince), pour assurer le mouvement dans l'axe vertical de la pince.
Travail pour la prochaine séance : Premier prototype papier avec les dimensions
Pôle Informatique
Travail réalisé :
Travail pour la prochaine séance : Familiariser avec documentation et reflechir a structures de programmes
Pôle Électronique
Travail réalisé (ANASS et CLÉO):
TravailOn poura vérifié, comme demandé par les instituteurs, le bon fonctionnement de tout l'équipement électrique durant les 2 premières heures. Pour ce faire, nous avons suivi les instructions du PDF fourni par les référents.
Puis lors de la prochainedernière séanceheure, :on a discuté de la direction que le groupe va prendre vis-à-vis du robot ainsi que de l'organisation du projet.