Projet Rob3 - Cléo, Léon, Adam, Anass, Valentin, Marianne
Objectif Général
Durant ce projet, nous souhaitons réaliser un robot muni d'une pince capable de se déplacer dans une arène en partant d'une position fixe pour aller chercher un totem dont la position est approximativement connue et venir le redéposer à un autre endroit de l'arène.
Liens utiles (sujet, codes, pieces...):
https://drive.google.com/drive/folders/14LajcKTP-gMjvzBnxbDHBuGncc4ly4fF?usp=sharing
Planning
(rajouter un tableau ou juste une section où on explique qui va faire quoi dans les séances à venir)
| Nom | Séance 1 | Séance 2 | Séance 3 |
|
Adam |
|||
| Anass | |||
| Cléo | |||
| Léon | |||
| Marianne | |||
| Valentin |
Séance 1 12/02/2026
Dans le cadre de notre première séance, on s'est familiarisé avec le projet. On a réparti les rôles pour une résolution ordonnée du problème :
Chef de projet : Cléo SAUVENAY,
Responsable du Wiki : Marianne RODRIGUEZ,
Responsable informatique : Valentin BOUR,
Responsable mécanique : Adam ABDENNADHER,
Responsable électronique : Léon CHERPITEL,
Pôle Mécanique
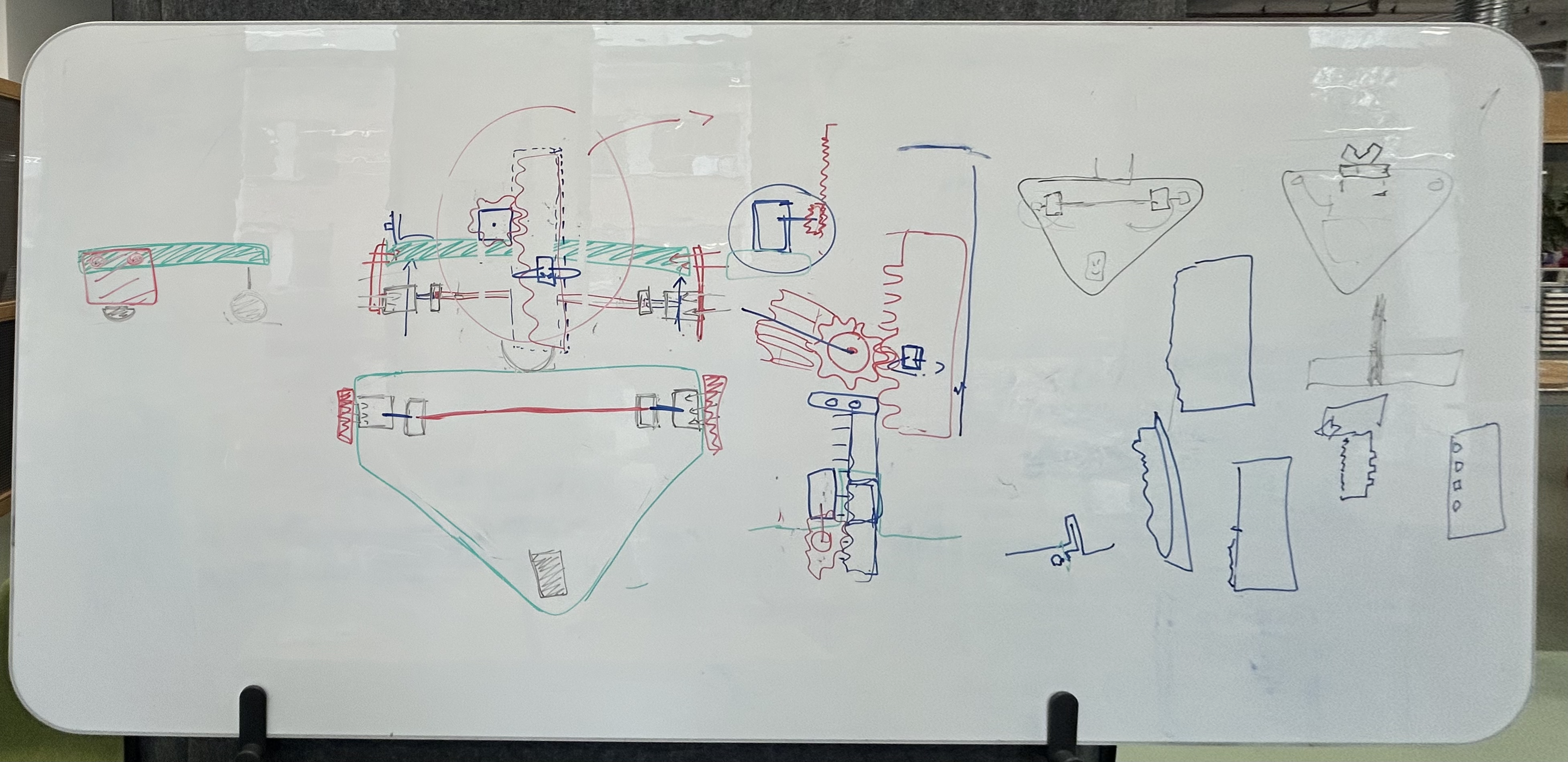
Travail réalisé : On a commencé la modélisation du robot par un dessin de châssis simple et un positionnement de roues. Nous avons opté pour un châssis de forme triangulaire avec deux angles tronqués où l'on va pouvoir fixer deux plaques perpendiculaires aux chassis, pour pouvoir fixer les deux moteurs des roues, et dans la pointe du triangle pouvoir fixer la roue folle. Dans le dessin nous avons dessiné une tige qui viendrait assurer que les deux roues soient dans le même axe, cependant, pour assurer que le robot puisse tourner, il se peut que cette tige n'apparaisse pas dans le modèle final, ou simplement on fera en sorte qu'il y ait suffisamment de jeu pour assurer le mouvement souhaité. Pour l'installation de la pince, on a prévu un système pignon-crémaillère. Il suffirait de prévoir une encoche où l'on mettra une plaque avec des dents, qui vont se fixer sur une roue dentée (fixée à la sortie du moteur de pince), pour assurer le mouvement dans l'axe vertical de la pince.
Pour choisir la position des capteurs, on a décidé de vérifier la distance entre les murs et le robot afin de surveiller notre trajectoire. C'est pourquoi un capteur sera positionné sur le côté. Nous en positionnerons aussi un au-dessus de la pince afin de détecter la distance entre la pince et le totem.
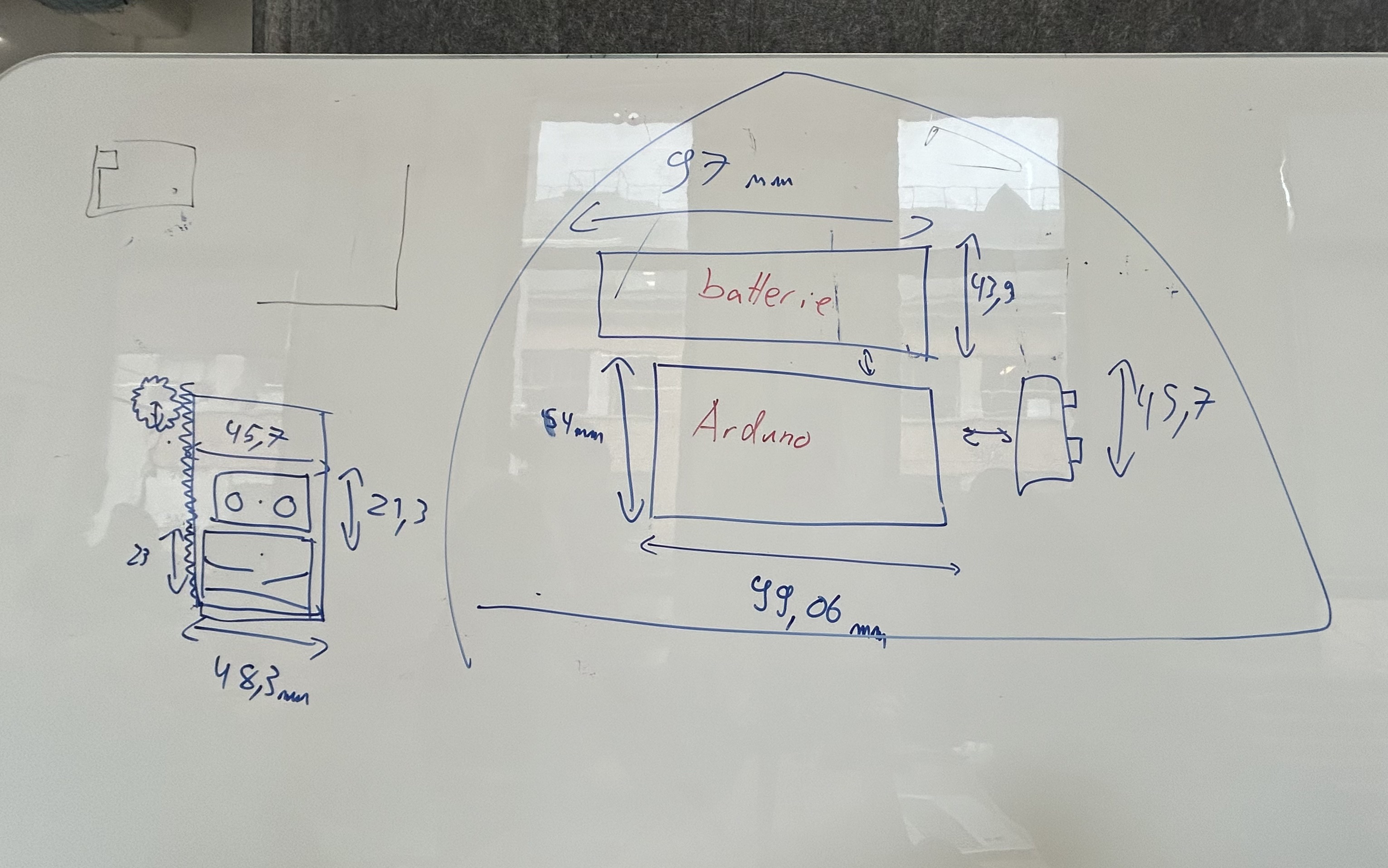
Travail pour la prochaine séance : Premier prototype papier avec les dimensions
Pôle Informatique
Travail pour la prochaine séance : Familiariser avec documentation et reflechir a structures de programmes
Pôle Électronique
Travail réalisé (ANASS et CLÉO): On a vérifié, comme demandé par les instituteurs, le bon fonctionnement de tout l'équipement électrique durant les 2 premières heures. Pour ce faire, nous avons suivi les instructions du PDF fourni par les référents.
Puis lors de la dernière heure, on a discuté de la direction que le groupe va prendre vis-à-vis du robot ainsi que de l'organisation du projet.
Séance 2 29/03/3026
Pôle Mécanique
Travail réalisé:
(ADAM et MARIANNE) Durant cette séance de projet, on a réfléchi au modèle qu'on avait déterminé à la séance précédente. C'est ainsi qu'on s'est rendu compte que le système pignon-crémaillère pour fixer la pince et pouvoir la manipuler était beaucoup trop compliqué. On a alors décidé de changer de stratégie et de faire un bras de type levier avec la pince au bout du bras. Ainsi, on a reflechit aux pièces necesaires pour ce nouveau système:
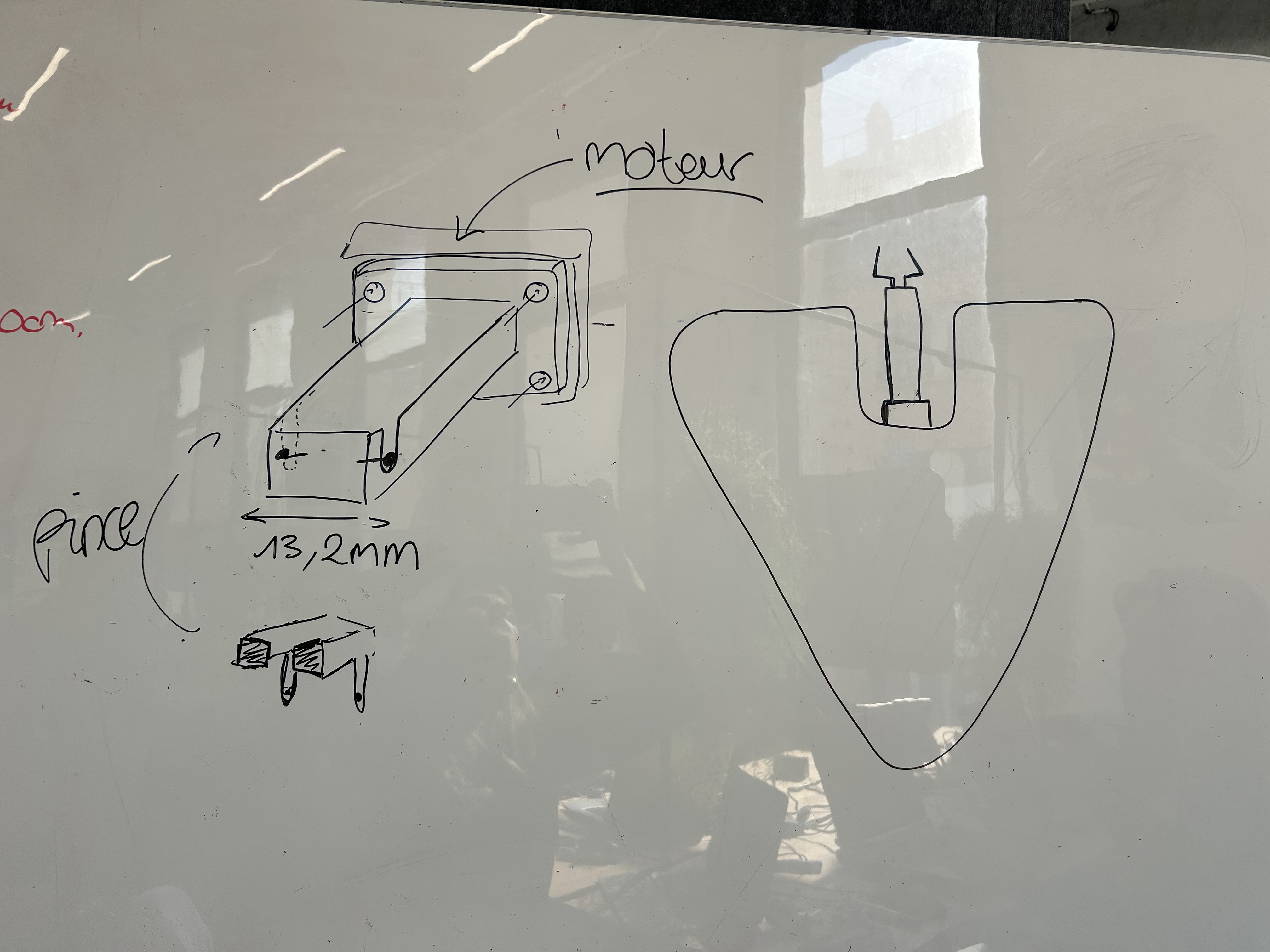
C'est ainsi qu'on a commencé la modélisation du bras (fixé au moteur et où l'on fixe la pince) et du support pour fixer le moteur au châssis sur SolidWorks, afin de pouvoir ensuite l'imprimer en impression 3D.
(CLÉO) En même temps, nous avons commencé à nous familiariser avec la découpeuse laser dans le but de déterminer les bonnes cotes au cas où nous devrions faire des encastrements. Pour avoir un trou de 3 mm, il faut mettre 2,8 sur SolidWorks, et pour avoir un bon encastrement, il faut faire 3,02, donc une différence de 0,22.
Pôle Informatique
Lors de cette séance, le pôle informatique a commencé la création du programme en définissant sa structure générale. Pour cela, nous avons d’abord réfléchi en groupe aux fonctions clés du programme — notamment comment suivre le mur, atteindre le totem puis rejoindre le point de dépôt — afin de nous coordonner sur un fonctionnement à la fois simple et optimal.
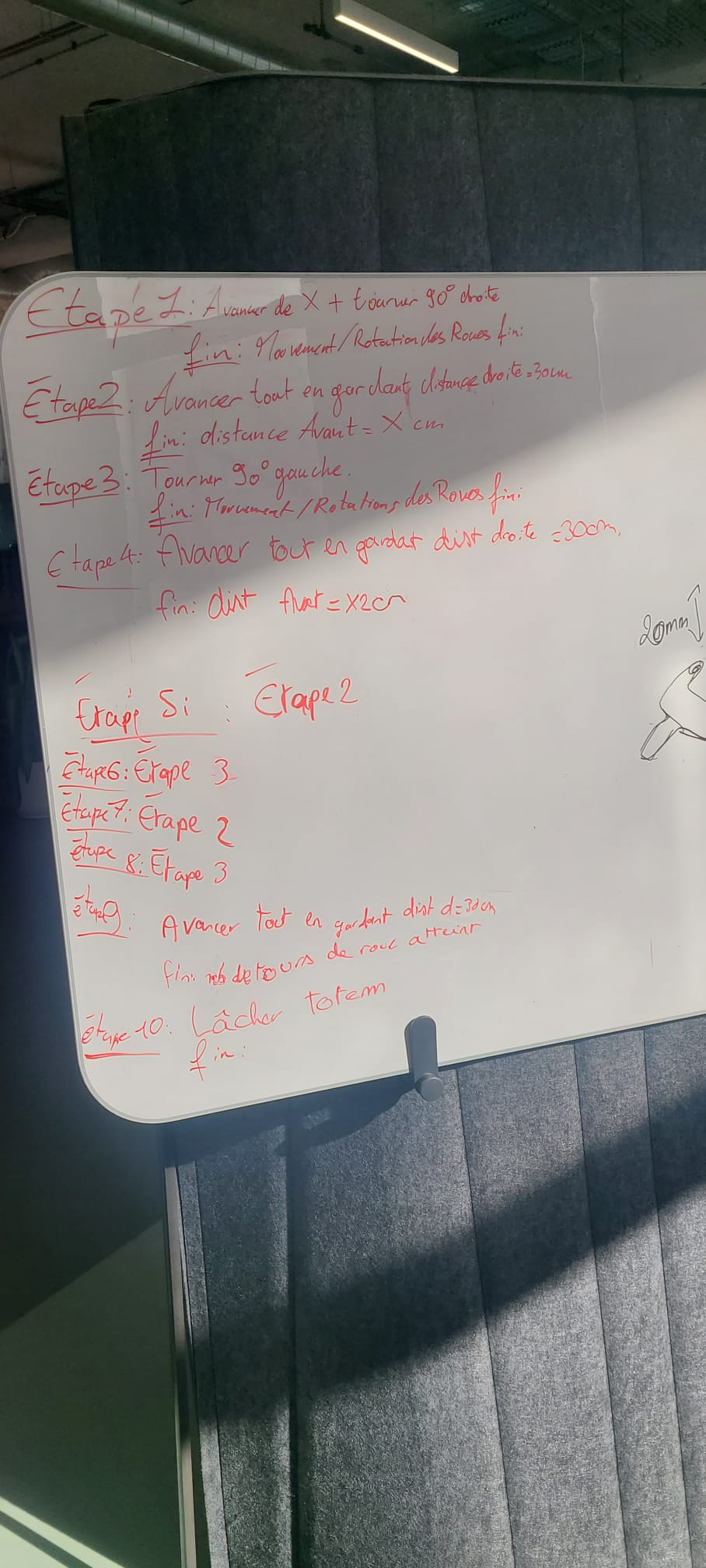
Nous avons ensuite identifié les différentes étapes importantes du déplacement du robot (avancer, tourner, rectifier la trajectoire) et construit des organigrammes pour les fonctions principales. Cette démarche nous a permis d’obtenir une vision claire des fonctions à implémenter et des opérations que le robot devra effectuer.
Nous avons finalisé ces organigrammes à la fin de la séance, ce qui nous a permis de réaliser un premier jet de code pour les éléments principaux.
Pôle Électronique
Concernant le pôle électronique, nous avons connecté deux câbles entre l’Arduino et le cerveau moteur en les soudant puis en les sécurisant avec une gaine thermorétractable. Nous avons ensuite ajouté un bornier afin de simplifier et d’optimiser les branchements. Enfin, le câblage des moteurs vers l’Arduino a été réalisé.