Projet Rob3 - Cléo, Léon, Adam, Anass, Valentin, Marianne
Objectif Général
Durant ce projet, nous souhaitons réaliser un robot muni d'une pince capable de se déplacer dans une arène en partant d'une position fixe pour aller chercher un totem dont la position est approximativement connue et venir le redéposer à un autre endroit de l'arène.
Lien vers l’énoncé détaillé: https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/1660
Liens utiles (sujet, codes, pieces...):
https://drive.google.com/drive/folders/14LajcKTP-gMjvzBnxbDHBuGncc4ly4fF?usp=sharing
Planning
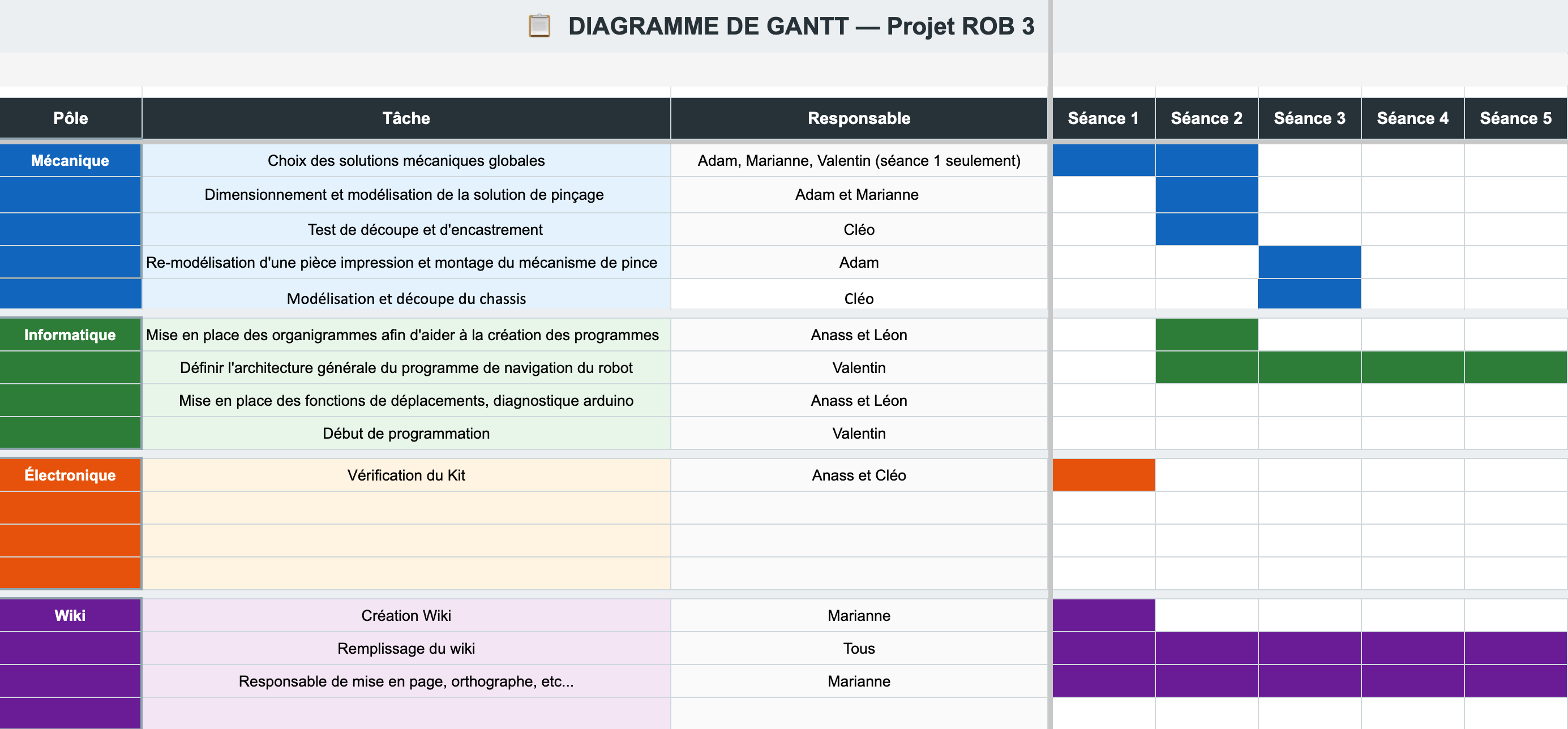
Afin d'avoir un planning structuré et facile à suivre, nous avons mis en place un diagramme de Gantt où vous pouvez voir les tâches précises qui composent chaque pôle, qui a participé à ces tâches et sur combien de séances elles sont étalées.
Lien vers le Diagramme de Gantt
Séance 1 12/02/2026
Dans le cadre de notre première séance, on s'est familiarisé avec le projet. On a réparti les rôles pour une résolution ordonnée du problème :
Chef de projet : Cléo SAUVENAY,
Responsable du Wiki : Marianne RODRIGUEZ,
Responsable informatique : Valentin BOUR,
Responsable mécanique : Adam ABDENNADHER,
Responsable électronique : Léon CHERPITEL,
Pôle Mécanique
Travail réalisé (ADAM, MARIANNE et VALENTIN):
La modélisation du robot commence par un châssis triangulaire à deux angles tronqués, permettant de fixer les moteurs des roues sur des plaques perpendiculaires et la roue folle à la pointe. Une tige assure l'alignement des roues, bien qu'elle puisse être absente ou ajustée dans le modèle final pour permettre la rotation.
Dans ce premier modèle la pince fonctionne via un système pignon-crémaillère : une plaque dentée coulisse dans une encoche et s'engrène avec une roue dentée entraînée par le moteur, assurant le mouvement vertical.
Enfin, deux capteurs de distance sont prévus : un sur le côté pour surveiller la trajectoire par rapport aux murs, et un au-dessus de la pince pour détecter la distance avec le totem.
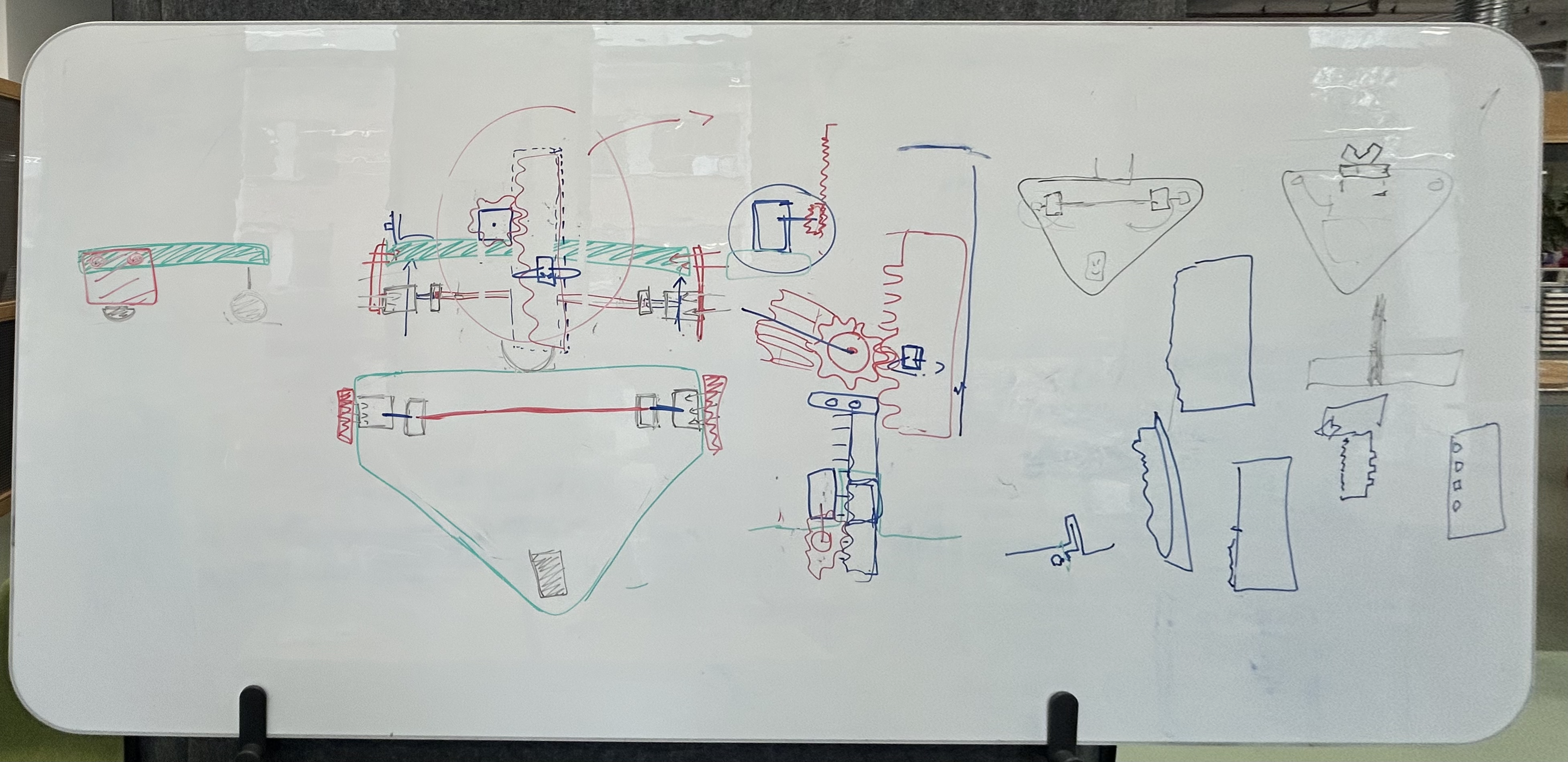
Schéma du châssis, du système pignon-crémaillère et du montage des roues sous le châssis.
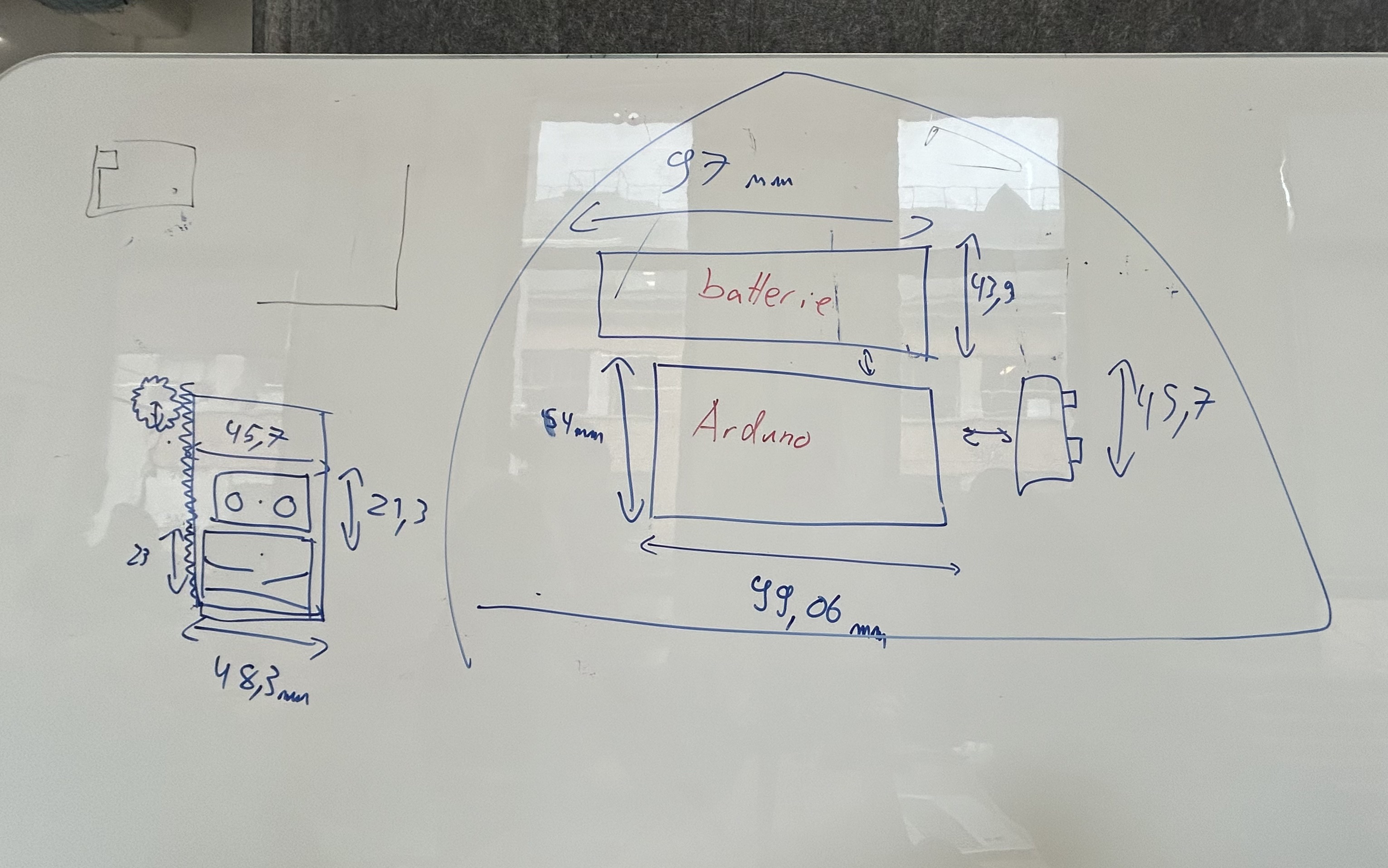
Schéma dimensionné avec placement des différents composants (carte Arduino, batterie, etc.)
Travail pour la prochaine séance : Un premier prototype en papier reprenant les dimensions complètes du robot.
Pôle Informatique
Travail pour la prochaine séance : FamiliariserSe familiariser avec la documentation et reflechirréfléchir aà des structures de programmes programmes.
Pôle Électronique
Travail réalisé (ANASS et CLÉO): On a vérifié, comme demandé par les instituteurs,enseignants, le bon fonctionnement de tout l'équipement électrique durant les 2 premières heures.heures, Pouren ce faire, nous avons suivisuivant les instructions du PDF fourni par les référents.Puis lorsLors de la dernière heure, onnous aavons discuté de la direction que le groupe vaallait prendre vis-à-visconcernant dule robot ainsi que de l'organisation du projet.
Séance 2 29/03/3026
Pôle Mécanique
Travail réalisé:
(ADAM et MARIANNE): Durant cette séanceance, denous projet,avons onreconsidéré a réfléchi aule modèle qu'ondéfini avaitlors déterminé àde la séance précédente. C'estNous ainsinous qu'on s'estsommes rendu compte que le système pignon-crémaillère prévu pour fixermanipuler la pince et pouvoir la manipuler était beaucoup trop compliqué.complexe Onà amettre alorsen œuvre. Nous avons donc décidé de changer de stratégie et ded'opter fairepour un bras de type levier avec la pince auà boutson duextrémité. bras.Nous Ainsi,avons onensuite a reflechitréfléchi aux pièces necesairesnécessaires pour ce nouveau système:me :
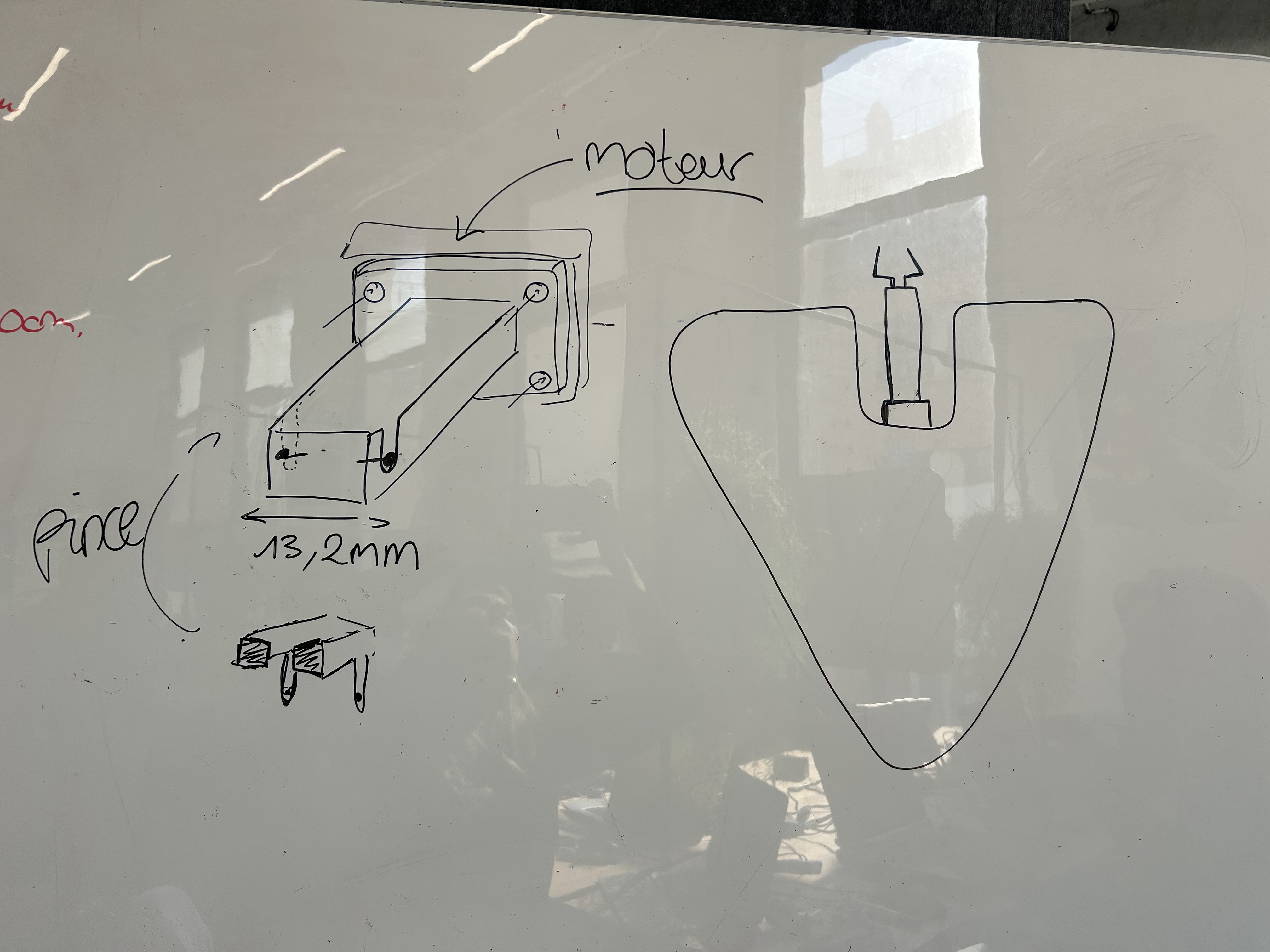
Schéma du montage de la pince et de son encastrement dans le châssis
C'est ainsi qu'onque anous avons commencé la modélisation du bras (fixé au moteur et où l'on fixeauquel la pince)pince etest attachée) ainsi que du support pourpermettant de fixer le moteur au châssis sur SolidWorks, afin de pouvoir ensuite l'imprimer en impression 3D.
(CLÉO): En même temps, nous avons commencé à nous familiariser avec la découpeuse laser dans le but de déterminer les bonnes cotes au cas où nous devrions faire des encastrements. Pour avoir un trou de 3 mm, il faut mettre 2,8 sur SolidWorks, et pour avoir un bon encastrement, il faut faire 3,02, donc une différence de 0,22.
Pôle Informatique
Objectif de la séance:ance : Définir l'architecture générale du programme de navigation du robot.
L’Travail réalisé (Anas, Léon, Valentin): L'équipe informatique s’s'est réunie pour établir les grandes lignes du programme.programme, Laen discussionse a portéconcentrant sur les trois fonctions centrales identifiées: :le suivi de mur (permettre au robot de longer un obstacle de manière stable), l'atteinte du totem (guider le robot jusqu’jusqu'à la cible) et le retour au point de dépôt (ramener le robot à sa position de dépose).t.
Les différentes primitives de déplacement duont robot ontégalement été identifiéesdéfinies : déplacement en ligne droite, rotation sur place ou en arc, correction d’unde écarttrajectoire, parainsi rapport àque la trajectoire cible, récupération et le dépôt du totem.
Pour chaque fonction principale,fonction, un organigramme a été réalisé afin de modéliser la logique de contrôle.le, Cette étape a permispermettant de :
- visualiser clairement les séquences
d’d'opérations ; - identifier les conditions et branchements nécessaires ;
- préparer une base solide pour
l’l'implémentation.
Algorithme de déplacement du robot
Paramètres : X = distance avec le mur en face, X2 = distance avec le totem
1. Avancer de X cm puis tourner à 90° droite
Fin : mouvement / rotation des roues = terminé
2. Avancer en gardant une distance à droite de 30 cm
Fin : distance avant = X cm
3. Tourner à 90° gauche
Fin : mouvement / rotation des roues = terminé
4. Avancer en gardant une distance à droite de 30 cm
Fin : distance avant = X2 cm
5. → Répéter l'étape 2
6. → Répéter l'étape 3
7. → Répéter l'étape 2
8. → Répéter l'étape 3
9. Avancer en gardant une distance à droite de 30 cm
Fin : nb de tours de roue atteint
10. Lâcher le totem
Paramètres : X = distance avec le mur en face, X2 = distance avec le totem.
Pôle Électronique
Travail réalisé (Anass et Léon): Concernant le pôle électronique, nous avons connecté deux câbles entre l’Arduino et le contrôleur moteur en les soudant, puis en les sécurisant avec une gaine thermorétractable. Nous avons ensuite ajouté un bornier afin de simplifier et d’optimiser les branchements. Enfin, le câblage des moteurs vers l’Arduino a été réalisé.
Séance 3 2/04/2026
Pole Mécanique:
RéalisationTravail du châssis:réalisé (Cléo): Modélisation du châssis sur SolidworksSolidWorks avec les trous prévuvus pour le placement des éléments etcomposants, le passage et l'optimisationla gestion des câbles. Découpe au laser dans une plaque de mdfMDF 6mm.6 mm. Après test de l'd'alignement, ilplusieurs fautajustements ont été identifiés : augmenter légèrement le diamètre des trous pour les vis m3M3 qui fixentfixant la carte Arduino etArduino, réduire l'espaceécart entre les deux dutrous milieu.centraux, Pourpositionner lales trous de fixation du moteur du bras,bras auen lieudiagonale plutôt qu'en ligne afin d'éliminer le jeu, et ajouter des trous supplémentaires pour le passage de prendre 2 trous en ligne, faire une diagonale pour éviter un léger jeu. Rajouter plus de trous pour ranger les serre-câbles avec des serres-flex.bles.
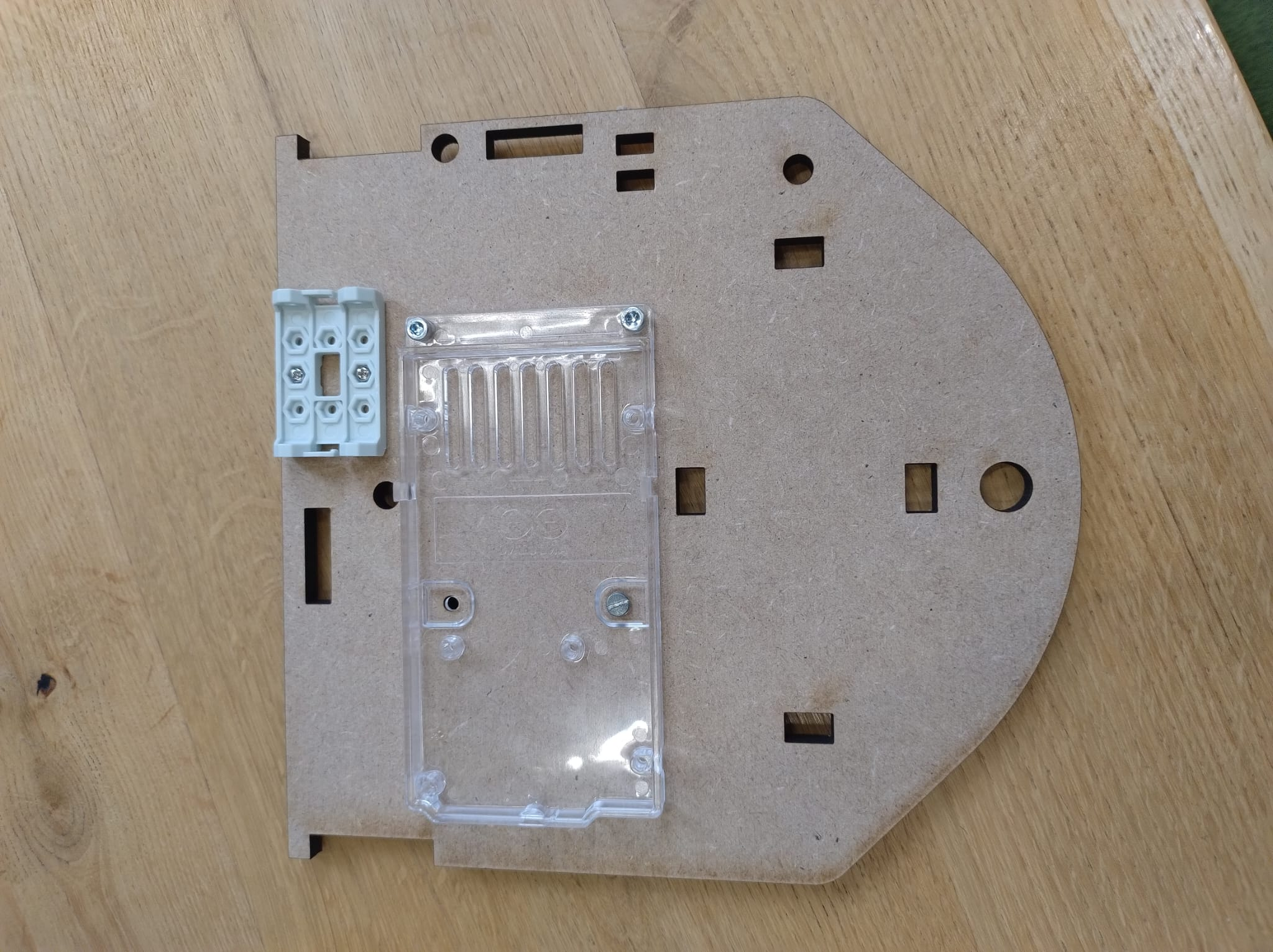
Réalisation des pièces et montagePhoto du braspremier dechâssis la pince: (Adam)
(Adam): Durant cette séanceance, nouson avonsa retravaillé la piècesce permettant d'exploiteractionner la pince, qu'il a fallu re-modéliser la après avoir impriméconstaté uneun pièceproblème malde dimensionner.dimensionnement sur le premier essai. La pièce finale est celle-ci:la suivante :
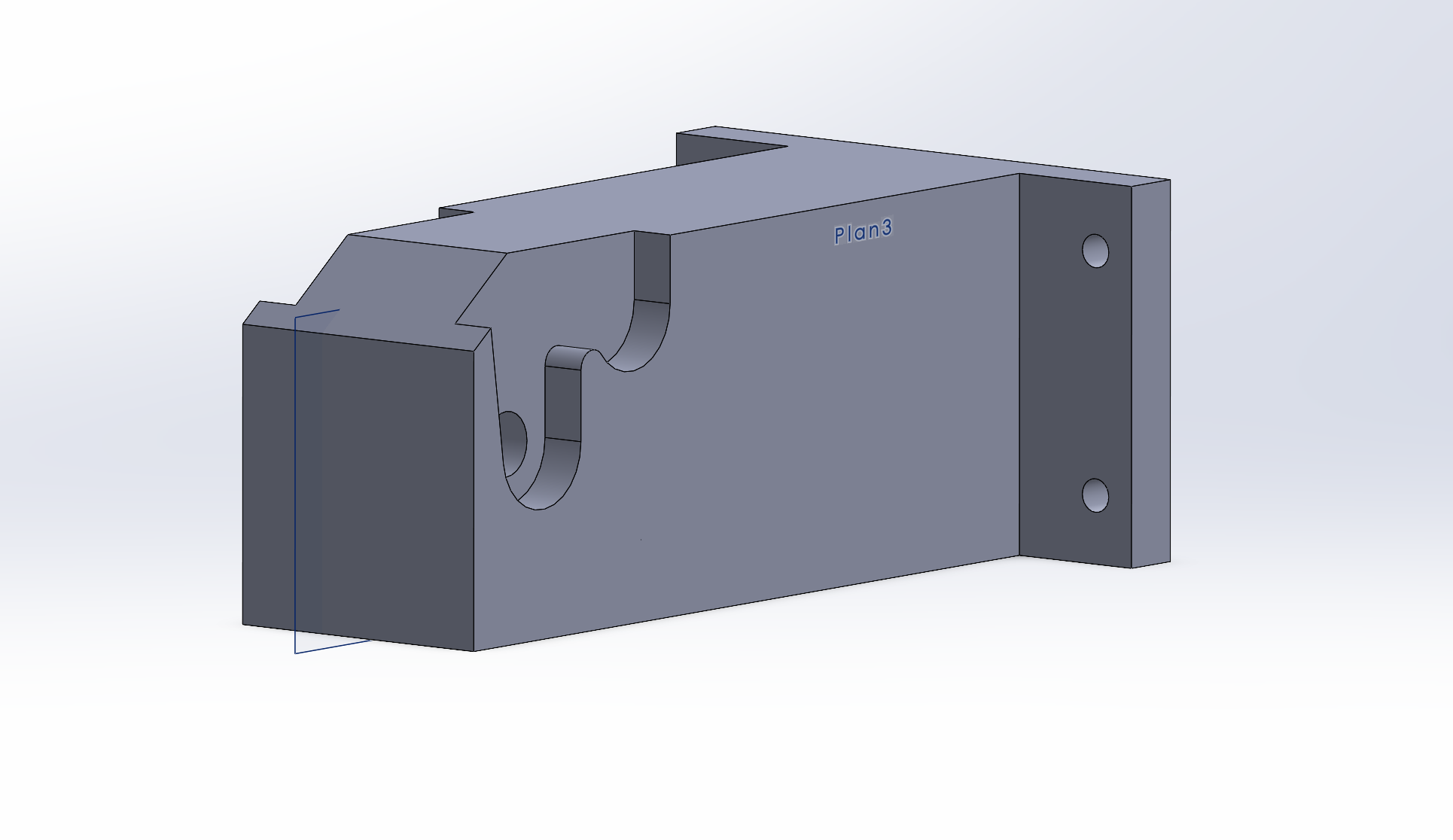
Après l'avoir imprimé,impression, nous avons montépu monter la pincepince, le moteur,moteur ainsi que lesl'ensemble fixationsdes ensembles. fixations.
Photo!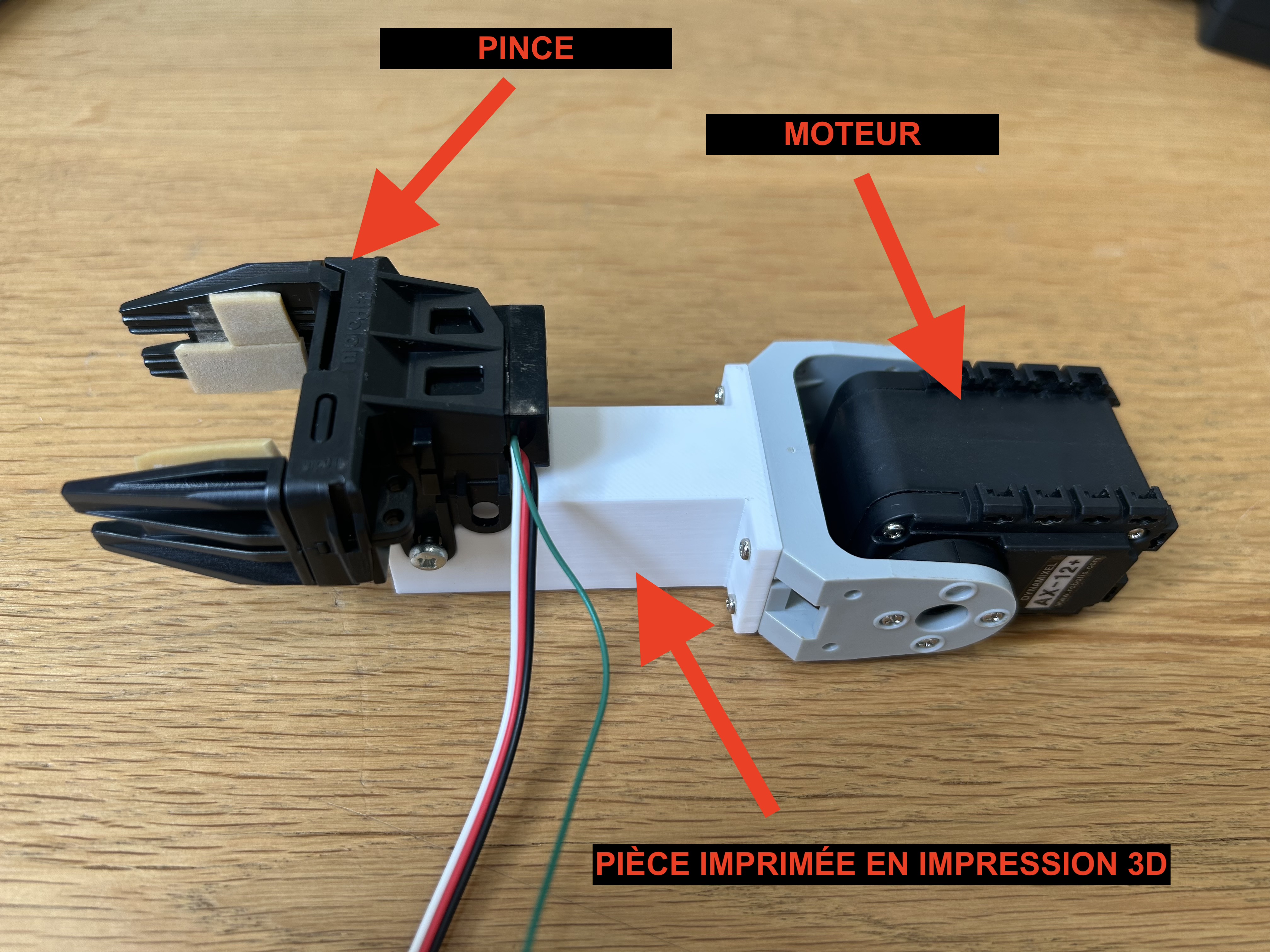
Pour finir nous avons réfléchi au montage des roues et à comment garantir leur parallélisme cela dans le but de pouvoir les monter la séance prochaine.
Photo du tableau avec l'idée
Pôle Électronique et Informatique
Travail réalisé (Anass, Léon, Valentin):
Lors de cette séance, leles pôleles informatique et électronique s’estse sont concentrés sur la réalisation dedes tests de déplacement du robot.robot, Pouren cela, nous nous sommes appuyéss'appuyant sur un code d’d'exemple permettant de contrôler les roues selon quatretrois modes : avancer (roues à la même vitesse),avancer, reculer (même vitesse en sens inverse) et tourner (une roue en avant, l’autre en arrière).tourner. Ce code s’s'est avéré fonctionnel et les quatretrois actions ont pu êtreété exécutées correctement.avec succès.
Cependant, undeux problèmemes estsont apparuapparus : la pince seeffectuait mettaitdes àmouvements bouger de manière incontrôlée, ce qui n’était pasnon prévu.vus, Enpuis en tentant de changer de portport, pour tester une autre commande, le port d’l'alimentation de la carte Arduino a été court-circuité.e. Nous avons donc passé uneUne grande partie de la séance a donc été consacrée à identifier quelsles composants étaient défectueux et lesquels fonctionnaientceux encore fonctionnels (capteurs et moteurs KTECH).
Pour la prochaine séance, l’l'objectif seraest de réimplémenter le code fonctionnel sur une nouvelle carte Arduino afin de retrouver les mouvements principauxde base du robot, puis de commencer à l’améliorer en d'intégrant au minimumgrer la détection des capteurs.
Séance 4 16/03/2026