SALBAS Selma
Processus d'innovation - Master Management de l'innovation - selma.salbas@etu.sorbonne-universite.fr
Première séance du vendredi 16 décembre 2025 :
Dans le cadre de cette UE, nous avons commencé par une séance d’initiation au prototype afin de découvrir les bases de la modélisation 3D et de l’impression. L’objectif de la première séance était de découvrir le FABLAB et les bases de l’impression 3D à travers le logiciel PrusaSlicer et les imprimantes Prusa MK4S.
Pour cette toute première impression, j’ai choisi d’imprimer un vase Miffy, à partir d’un fichier STL disponible directement sur le site web printables.com.
Voici le modèle que j’ai choisi :

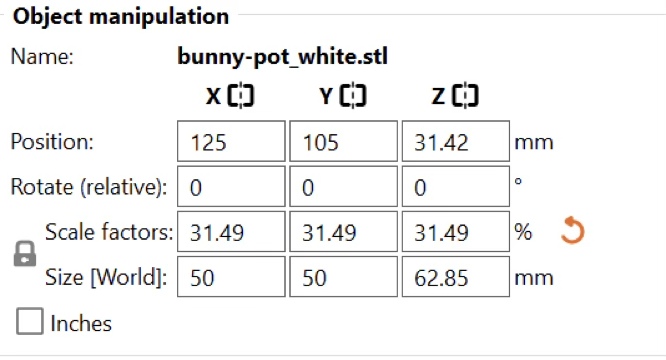
J’ai ensuite importer le fichier STL sur PrusaSlicer dans le but de régler les paramètres tels que la taille du vase et le temps d’impression, puis je l’ai exporter en G code pour débuter l’impression.
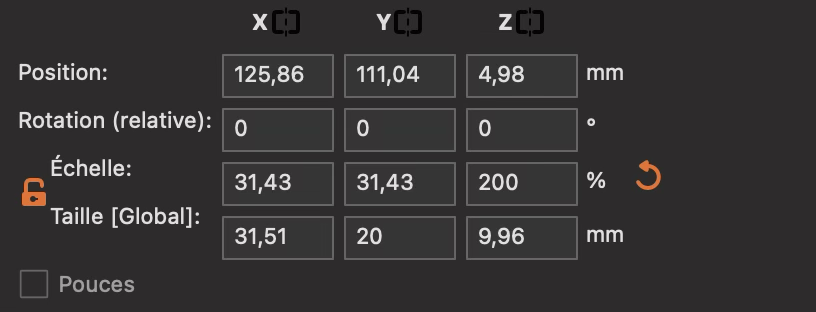
Paramètres de l’objet :
Visualisation :
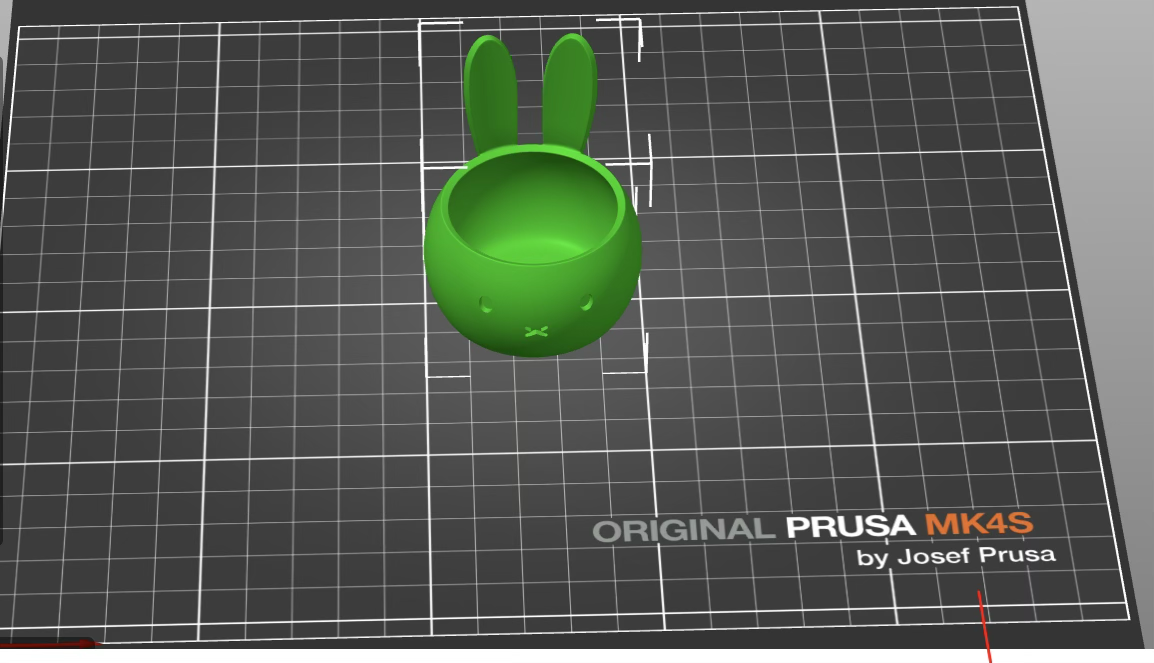
Je n’ai malheureusement pas eu le temps d’imprimer ce vase.
Deuxième objet :
J’ai choisi de réaliser le logo d’un chanteur célèbre en impression 3D.
Comme pour l'objet précédent, La première étape a consisté à rechercher une image du logo du chanteur. Cette image a ensuite été traitée afin de pouvoir être exploitée en impression 3D. Pour cela, elle a été convertie en modèle 3D au format STL, ce qui permet de transformer une image 2D en un volume imprimable. Cette conversion a nécessité de vérifier la lisibilité du logo et la cohérence des formes afin d’obtenir un rendu correct une fois imprimé.
Une fois le fichier STL obtenu, celui-ci a été importé dans le logiciel de tranchage PrusaSlicer. Cette étape est essentielle, car elle permet de préparer le fichier pour l’impression 3D. J’ai alors ajusté différents paramètres tels que :
- la hauteur de couche,
- le taux de remplissage,
- la vitesse d’impression,
- ainsi que l’orientation de la pièce sur le plateau.
Le fichier G-code généré a été transféré sur l’imprimante 3D Prusa MK4S via une connexion USB. L’impression a ensuite été lancée avec du filament PLA rose.
Une fois l’impression terminée, la pièce a été retirée du plateau à l’aide d’une spatule.
Voici le logo que j'ai choisis d'imprimer avec ses réglages :
Résultat final :

Deuxième séance du 9 janvier 2026 :
Lors de cette deuxième séance, nous avons découvert le logiciel OpenSCAD.
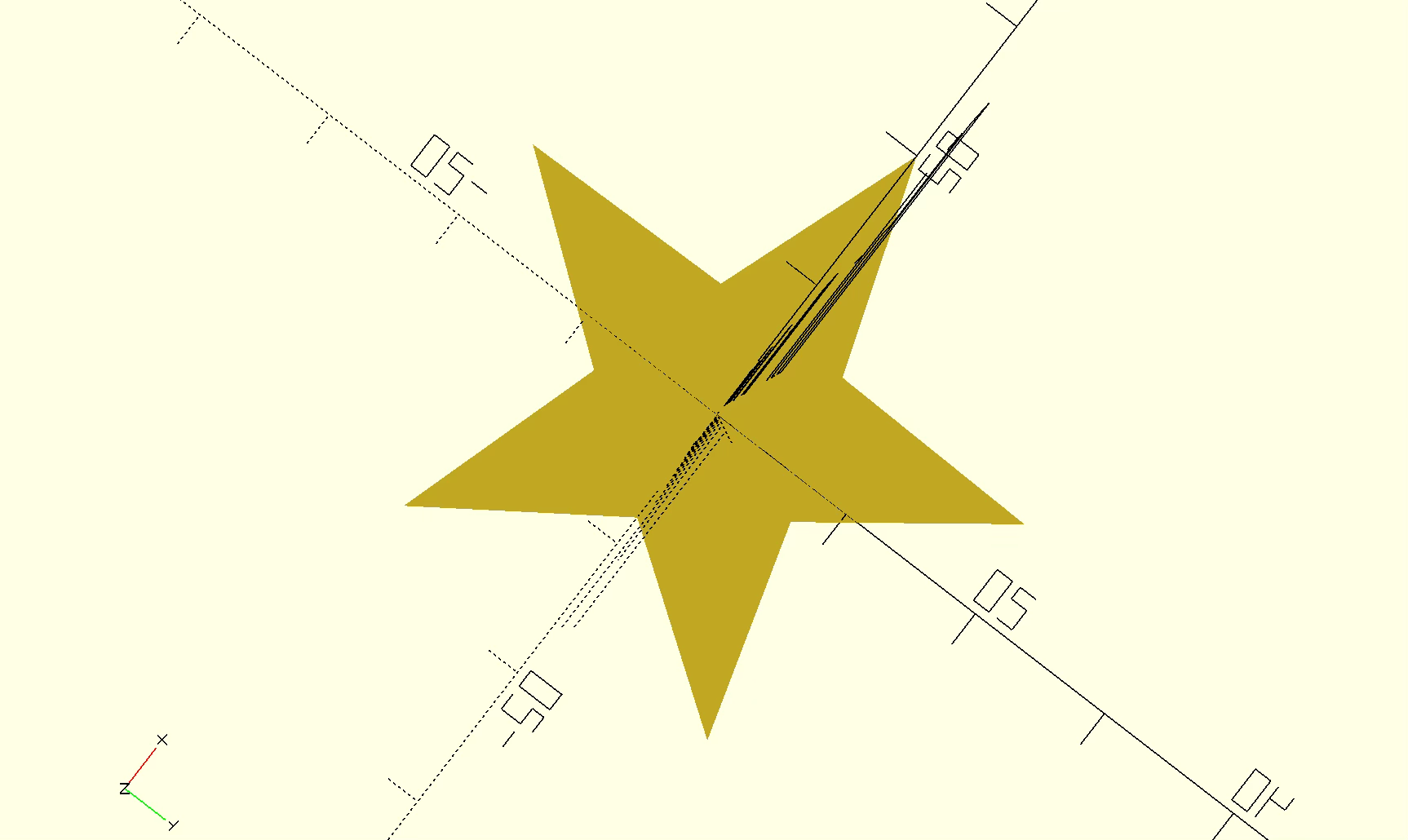
J’ai décider de commencer parréalisé un objet imprimé en 3D intégrant un aimant, ce qui représente un niveau de complexité supplémentaire par rapport à une impression classique. L’objet choisi est une forme d’étoile, pensée comme un magnet décoratif pouvant être fixé sur une surface métallique.
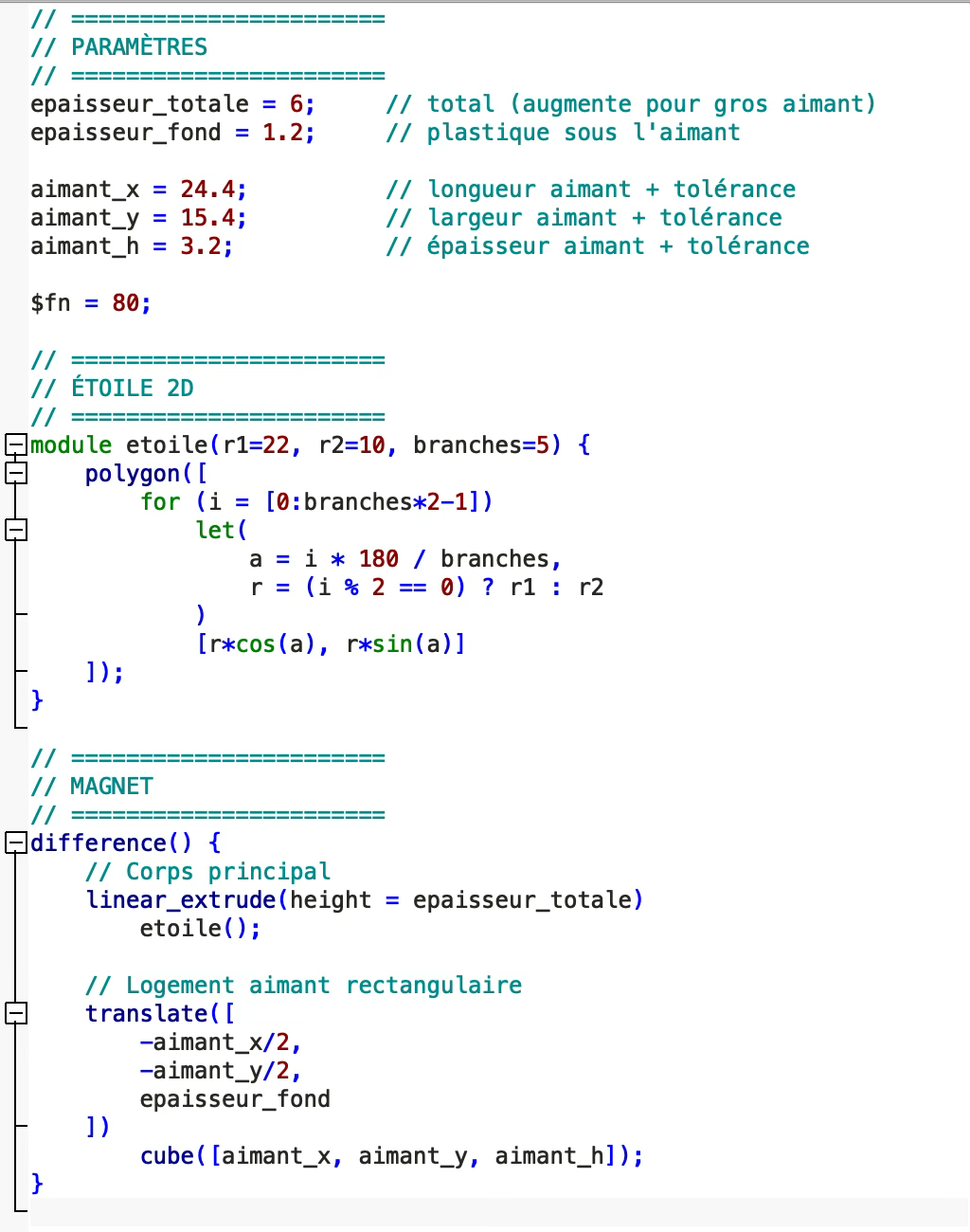
La conception de l’objet a été réalisée à l’aide du logiciel de modélisation OpenSCAD. Contrairement à un modèle simple, cet objet a nécessité la création de deux volumes distincts :
- un volume principal correspondant à la forme extérieure de l’étoile,
- et un volume interne destiné à accueillir un aimant rectangulaire.
Code sur OpenSCAD :
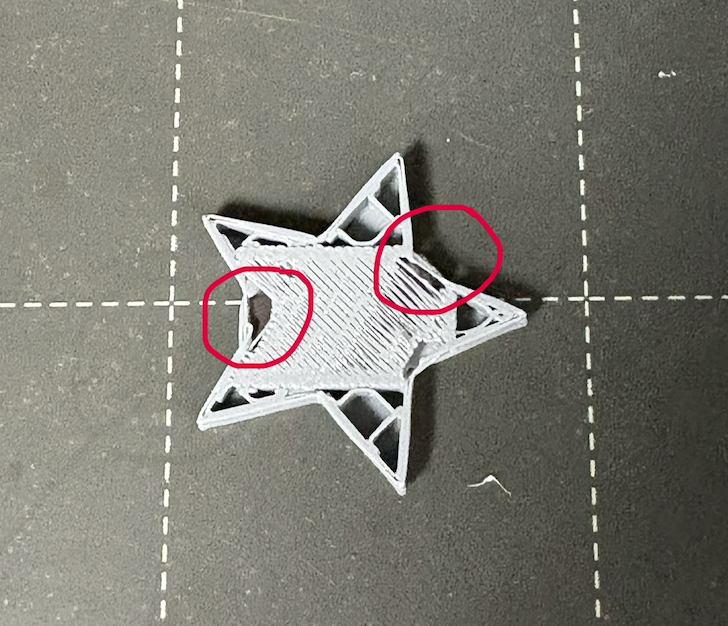
Un logement précis a été intégré à l’intérieur de la pièce (visible sur les images). Les dimensions de ce logement ont été volontairement légèrement augmentées afin de prendre en compte les tolérances d’impression, garantissant que l’aimant puisse être inséré facilement sans forcer.
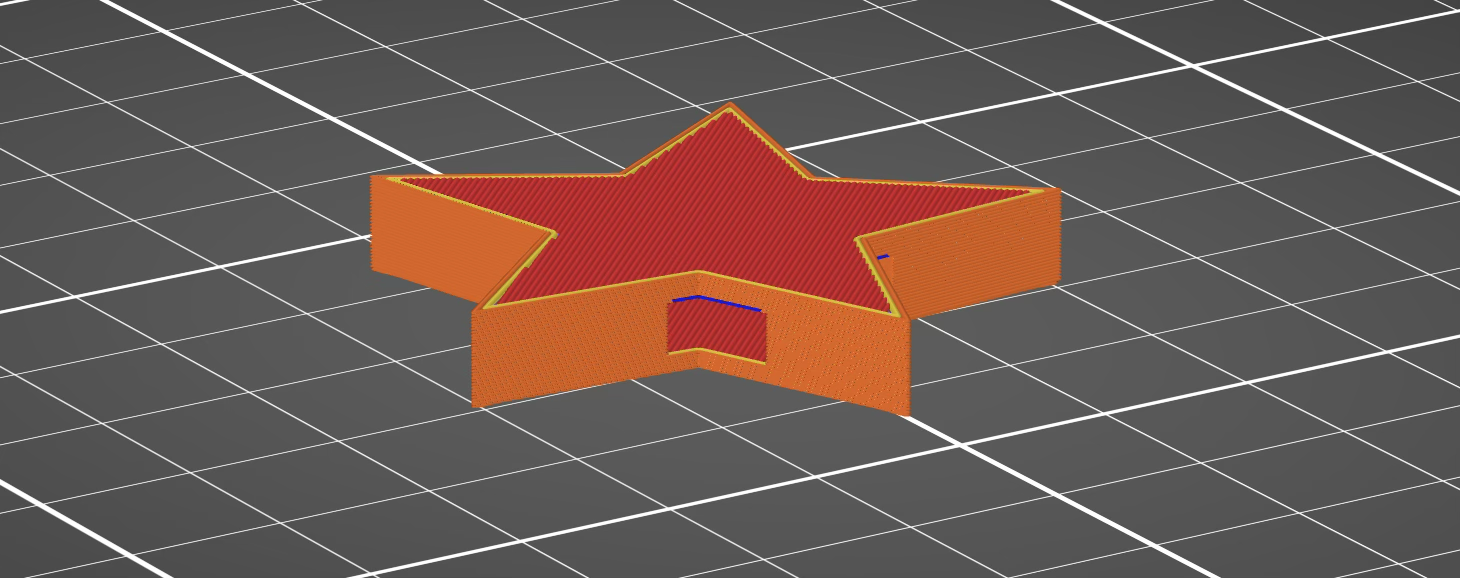
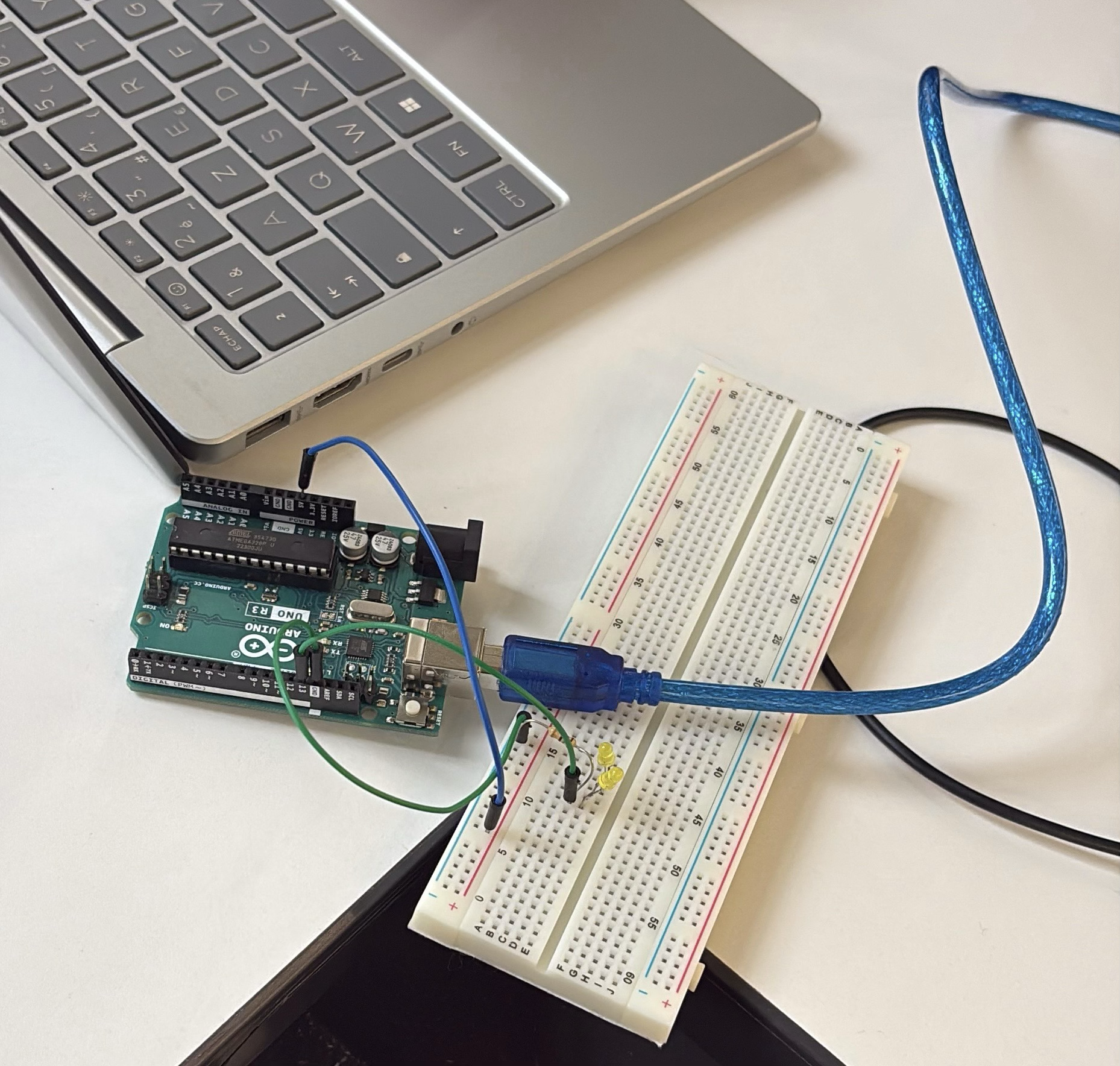
Lorsque l’impression a atteint la hauteur correspondant au fond du logement de l’aimant, une pause a été programmée. Cette pause a permis d’insérer manuellement l’aimant dans la cavité prévue à cet effet (au niveau des cercles rouges sur la photo qui suit). L’impression a ensuite été reprise, ce qui a permis de sceller l’aimant à l’intérieur de l’objet, sans ajout de colle. Cette pause à été réalisée à 73% de l'avancement, ce qui correspond a 5/6 minutes d'impression. À ce moment, la cavité prévue pour mel'aimant familiariserétait entièrement formée mais pas encore refermée par la couche supérieure. Une fois l'aimant correctement positionné dans son emplacement prévu, l'impression à été reprise ce qui a permis de refermer la cavité et de sceller l’aimant à l’intérieur de l’objet. Cette méthode permet d’intégrer un élément externe de manière propre et durable, sans nécessiter de collage supplémentaire
État de l'impression au moment de la pause :
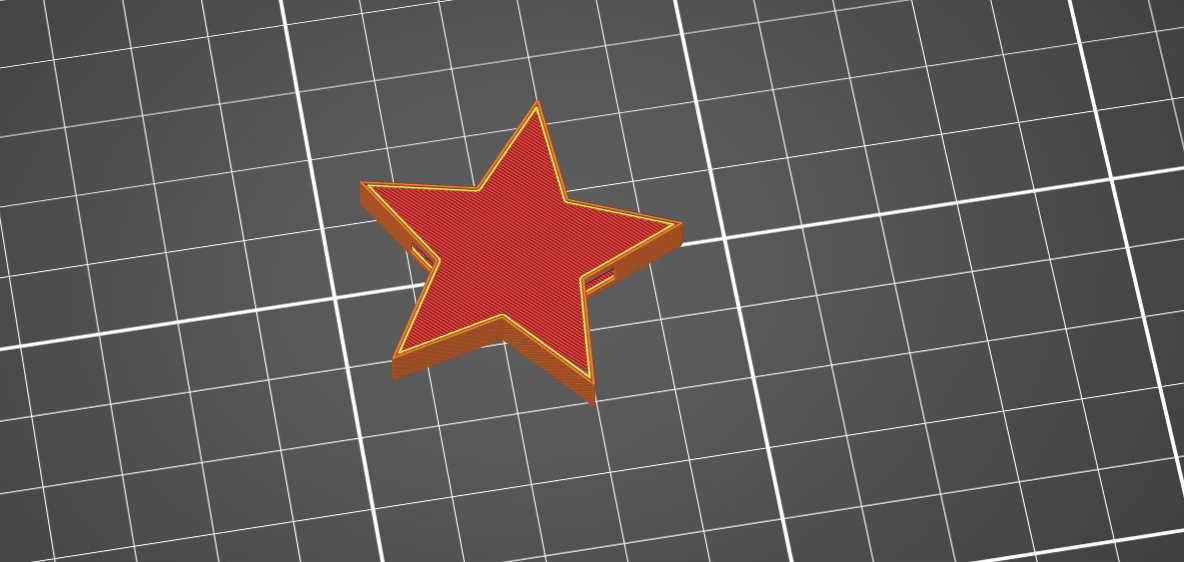
Résultat :

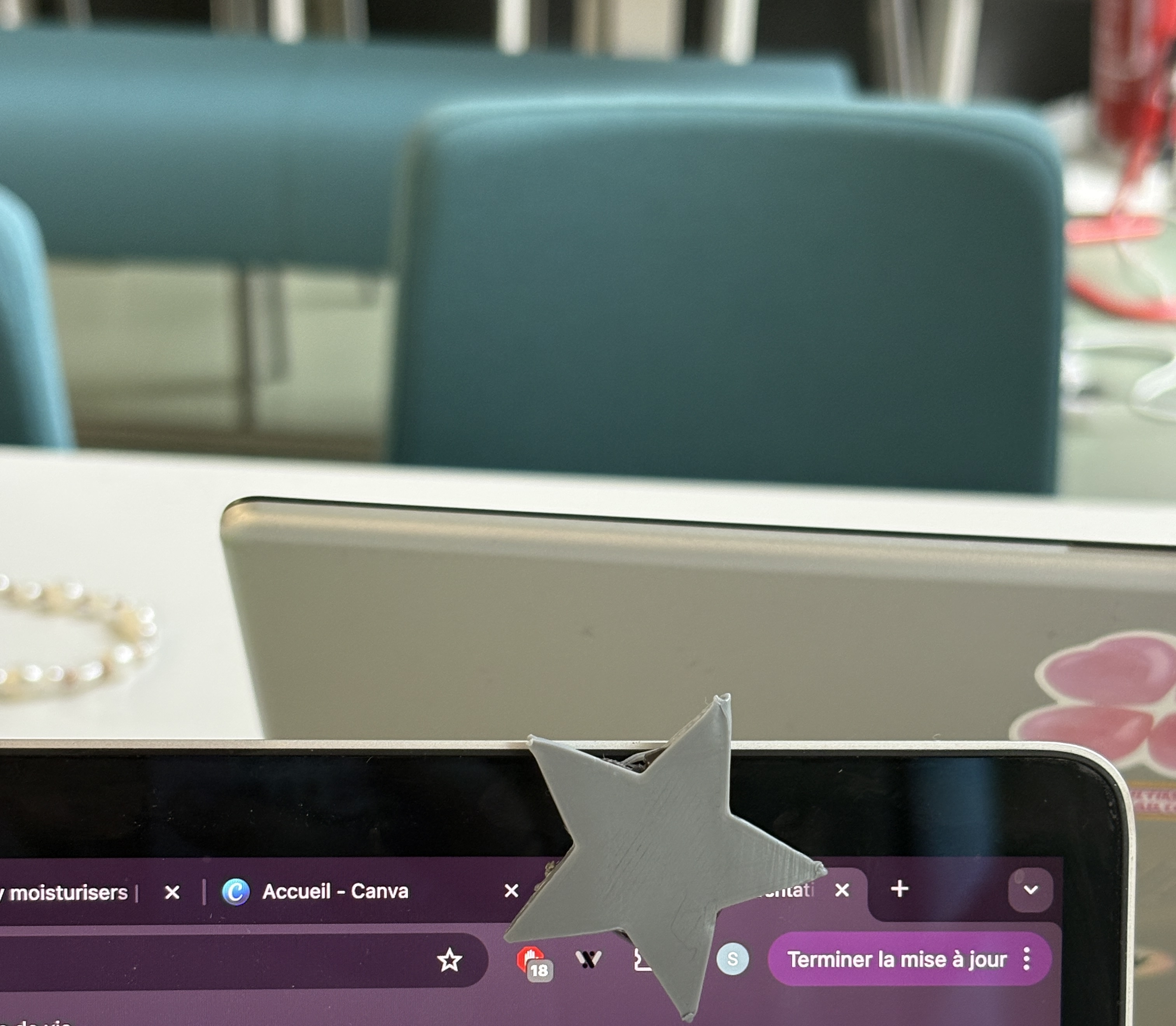
Le projet est réussi : l'aimant adhère bien aux surfaces alimentées comme mon ordinateur sur la photo juste au dessus.
L'étoile présente malheureusement quelques défauts comme les pointes qui sont arrondies et non pointues. Cela met en avant les limites normales de l'impression 3D.
Prototypage : ( avec le codeSarah et Mélissa)
La suite des séances avaient pour but de découvrir le logiciel.prototypage Ceten objetutilisant les cartes Arduino.
Plateforme expérimentale : Arduino
Matériel principal : Arduino Uno
1. INTRODUCTION
Cette séance vise l’appropriation d’une plateforme de prototypage microcontrôlée par la mise en œuvre progressive de fonctions fondamentales des systèmes embarqués : génération de sorties numériques, gestion temporelle de l’exécution et interaction capteur–actionneur via acquisition analogique.
Premier prototype :
L’objectif est toutde simplementmettre en œuvre une sortie logique afin de caractériser la commutation de potentiel sur une broche numérique et sa traduction en signal lumineux.
Dispositif
- Carte Arduino Uno
- LED intégrée (broche numérique 13)
- Environnement Arduino IDE
Code
void setup() {
unepinMode(LED_BUILTIN, étoile.OUTPUT);
}
void loop() {
digitalWrite(LED_BUILTIN, HIGH);
delay(1000);
digitalWrite(LED_BUILTIN, LOW);
delay(1000);
}
Modèle de fonctionnement
La broche associée à LED_BUILTIN est configurée en sortie. La boucle principale génère une onde carrée de période 2 s par alternance HIGH/LOW, correspondant à une commutation entre ~5 V et 0 V.
Observation
La LED présente un clignotement périodique stable, validant la correspondance entre état logique et émission lumineuse.
Deuxième prototype :
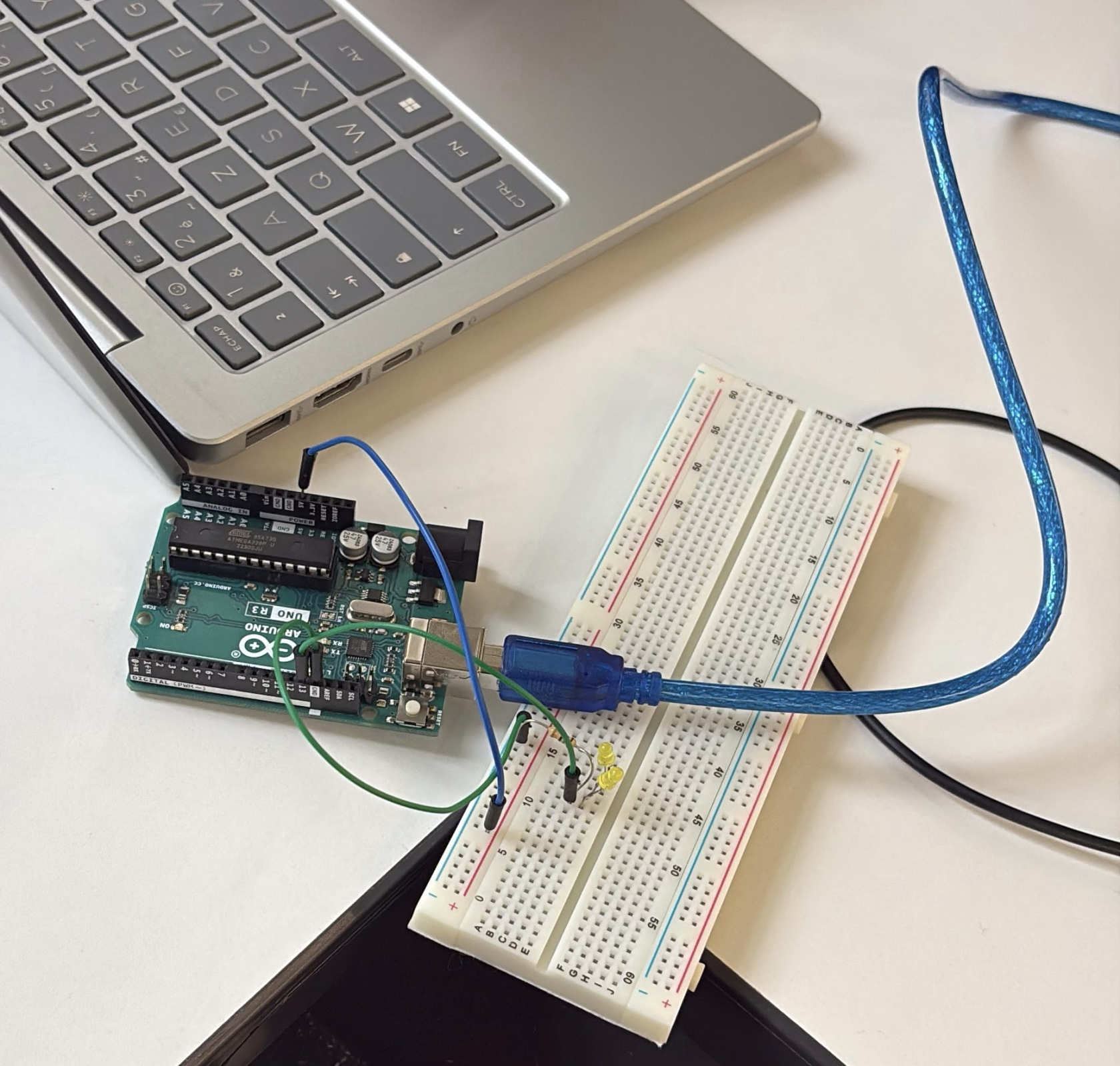
Dispositif
- Carte Arduino Uno
- Deux LED externes
- Deux résistances de limitation de courant
- Breadboard
Code
void setup() {
pinMode(13, OUTPUT);
pinMode(12, OUTPUT);
}
void loop() {
digitalWrite(13, HIGH);
delay(2000);
digitalWrite(13, LOW);
digitalWrite(12, HIGH);
delay(1000);
digitalWrite(12, LOW);
delay(500);
}
Les deux LED ne clignotent pas de manière indépendante.
Le programme exécute les instructions l’une après l’autre à cause de la fonction delay(), ce qui impose un fonctionnement séquentiel.
Observation :
- Le contrôle de plusieurs LED fonctionne correctement.
- Les délais bloquent l’exécution du programme pendant leur durée.
- Cela montre la limite de cette méthode pour contrôler plusieurs actions en même temps.
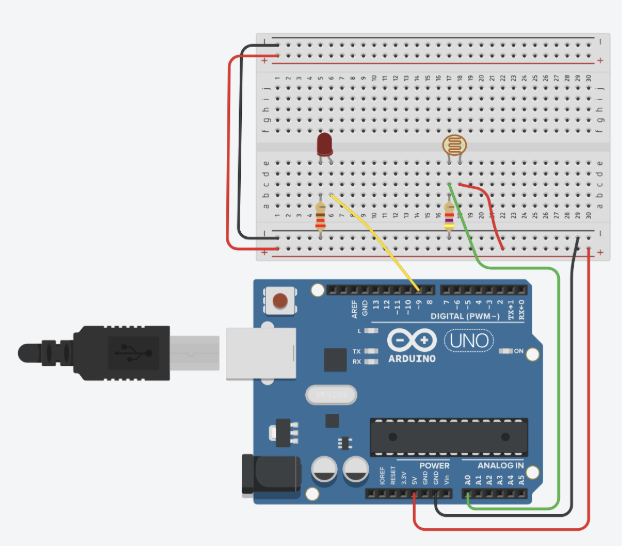
Prototype 3 :
//L’objectif Paramètresest de mettre en œuvre une chaîne d’acquisition analogique et utiliser une grandeur physique (luminosité) comme variable de décision pour le pilotage d’une LED.
branchesDispositif
- Carte Arduino Uno
- Photo-résistance (LDR)
- Résistance de référence (pont diviseur de tension)
- LED + résistance
- Breadboard
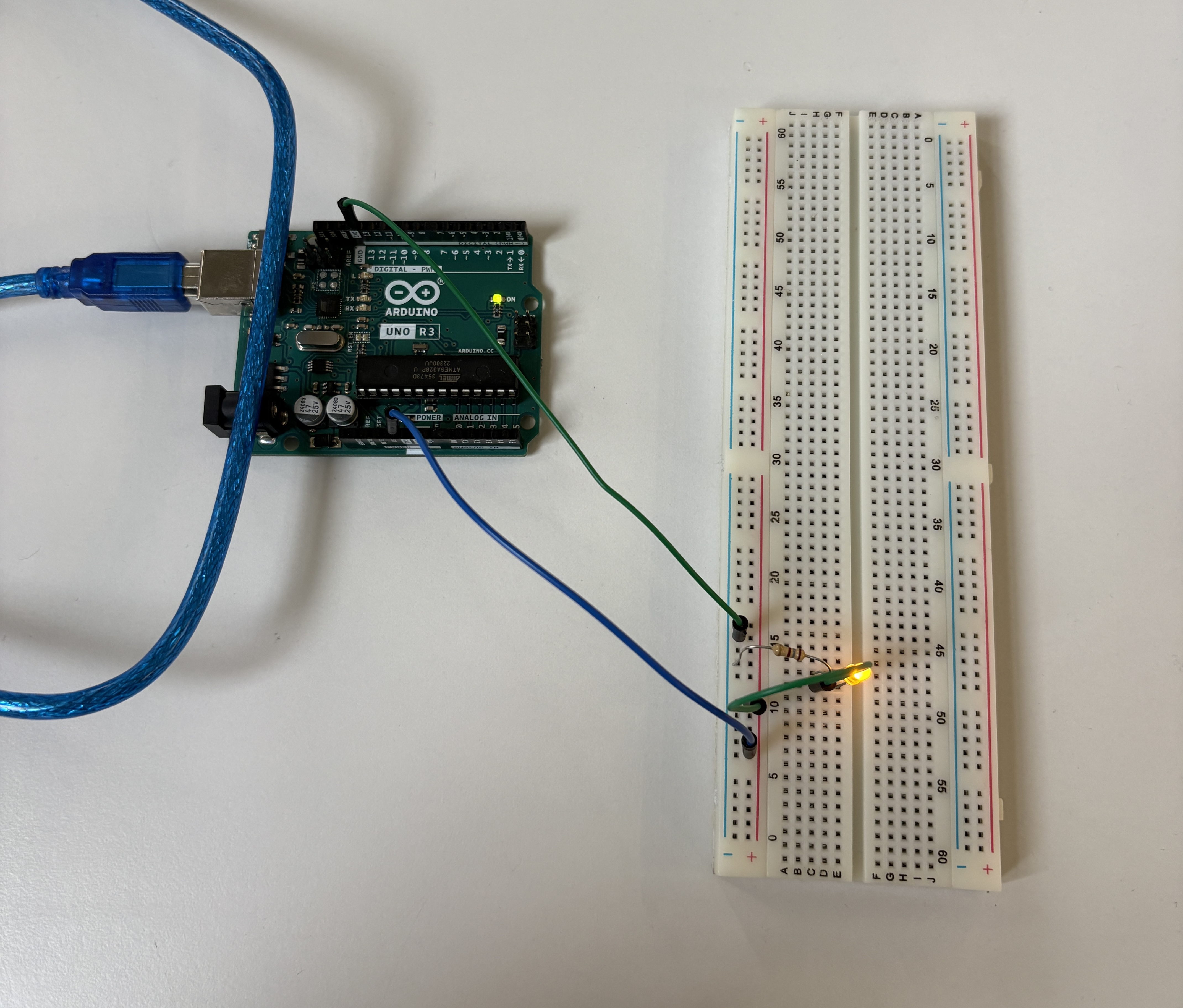
Principe
- Lecture analogique de la tension issue du capteur
- Comparaison à un seuil expérimental
- Activation ou désactivation de la LED selon la condition lumineuse
Code
int capteur = 5; // nombre de pointes
rayon_ext = 20; // rayon extérieur (mm)
rayon_int = 8;A0; // rayonentrée intérieuranalogique (mm)de la photorésistance
epaisseurint led = 5;13; // hauteurLED (interne ou externe)
int seuil = 500; // seuil de l'étoileluminosité (mm)à ajuster)
linear_extrude(heightsetup() = epaisseur)
polygon(points = [{
forpinMode(led, (i = [0 : 2*branches-1])OUTPUT);
let(Serial.begin(9600); // pour voir les valeurs mesurées
}
void loop() {
angleint valeur = i * 180analogRead(capteur); // branches,lecture du capteur
r = (i % 2 == 0) ? rayon_ext : rayon_intSerial.println(valeur);
)if (valeur < seuil) {
[digitalWrite(led, rHIGH); * cos(angle),// rsombre *→ sin(angle)LED ]allumée
]) } else {
digitalWrite(led, LOW); // lumineux → LED éteinte
}
delay(200);
}
Visualisation :Observation
La variation d’éclairement modifie continûment la valeur mesurée ; la LED change d’état lorsque le seuil est franchi, établissant une boucle perception–décision–action.
exercices mettent en évidence la correspondance entre modèle logiciel et comportement matériel. L’usage de temporisations bloquantes simplifie l’implémentation mais limite l’indépendance temporelle des actionneurs. L’intégration d’un capteur analogique démontre la capacité du système à fermer une boucle de contrôle élémentaire dépendante de l’environnement.
// Paramètresbille_radius = 3; // rayon d'une billenb_billes = 10; // nombre de billesespacement = 8; // distance entre les billes$fn = 50;
// Génération des billesfor (i = [0 : nb_billes-1]) { translate([i * espacement, 0, 0]) sphere(r = bille_radius);}