Smart Wi-Fi RC Car : Intégration Mécatronique Multimodale
Conception hybride (Impression 3D & Laser) pilotée par ESP32:
1. Présentation du Projet
Ce projet final consiste en la création d'un véhicule robotisé autonome, pilotable via n'importe quel ordinateur connecté au même réseau Wi-Fi. L'originalité du projet réside dans sa structure hybride : un châssis technique imprimé en 3D et une carrosserie structurelle découpée au laser.
| Domaine d'Application | Machine / Outil | Logiciel |
| Impression 3D | Prusa MK4S | SolidWorks / PrusaSlicer |
| Découpe Laser | Trotec Speedy 360 | Inkscape / SolidWorks |
| Électronique | ESP32 & L298N | Arduino IDE |
[IMAGE DE LA VOITURE FINALE]
2. Conception Mécanique (Parties 1 & 3)
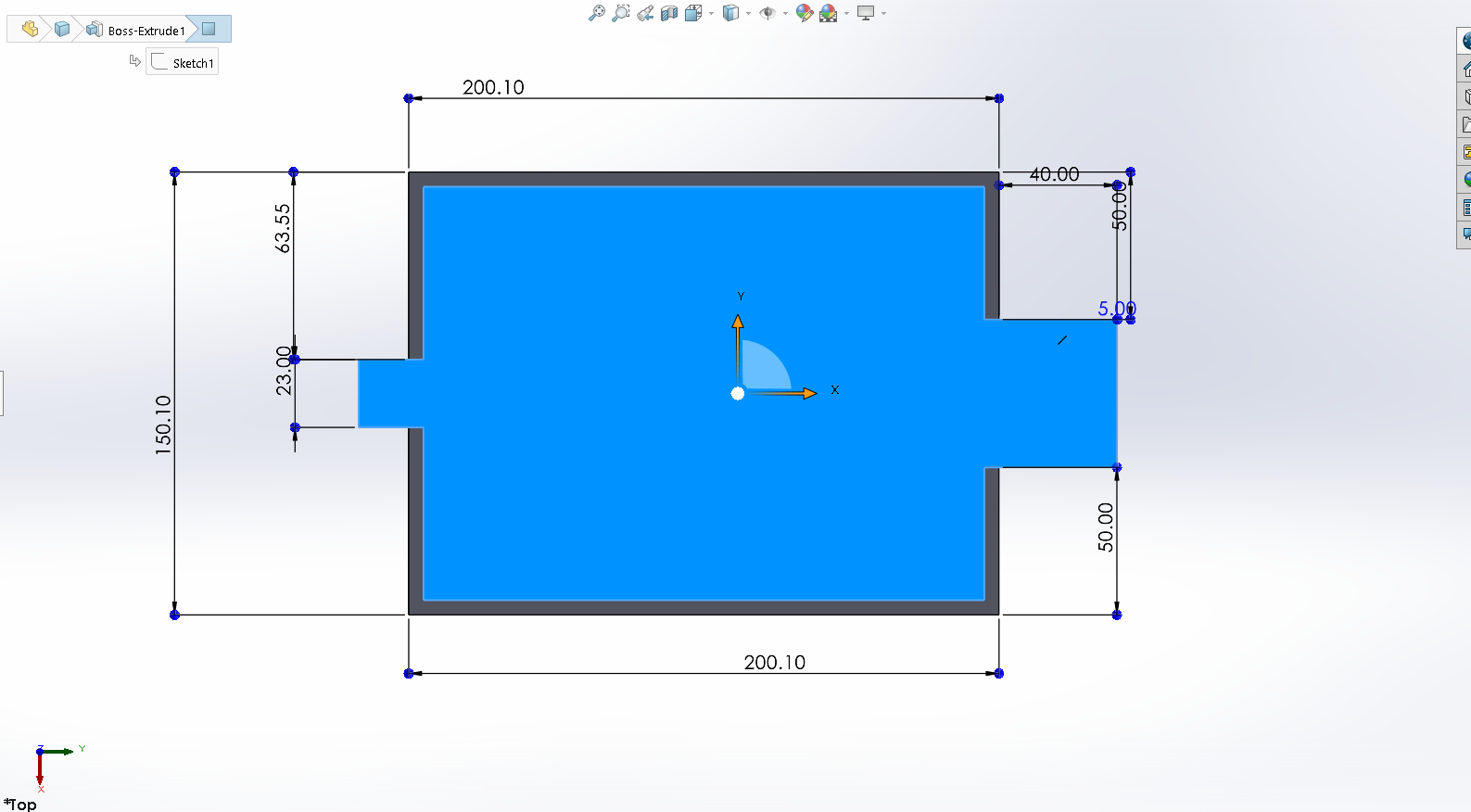
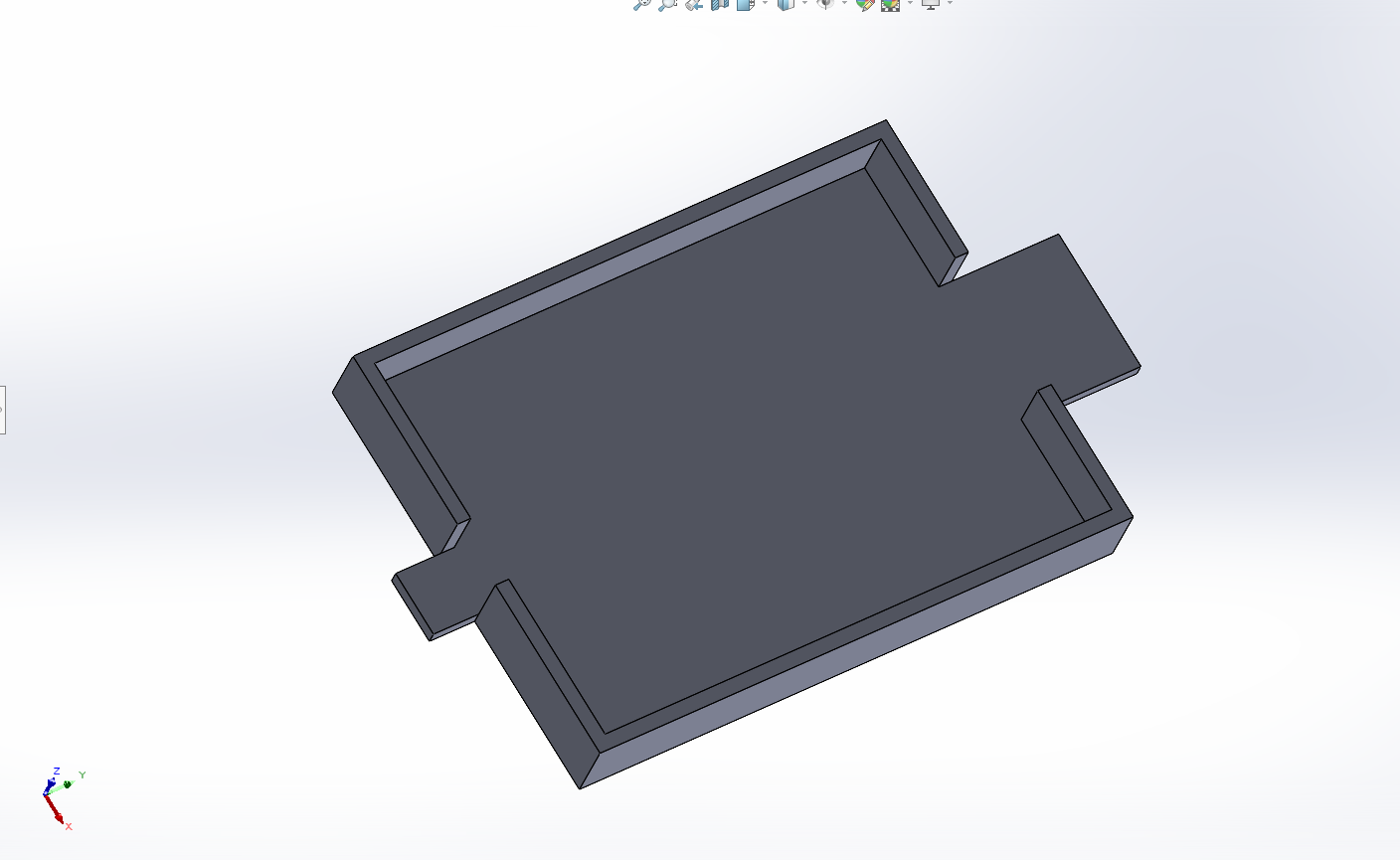
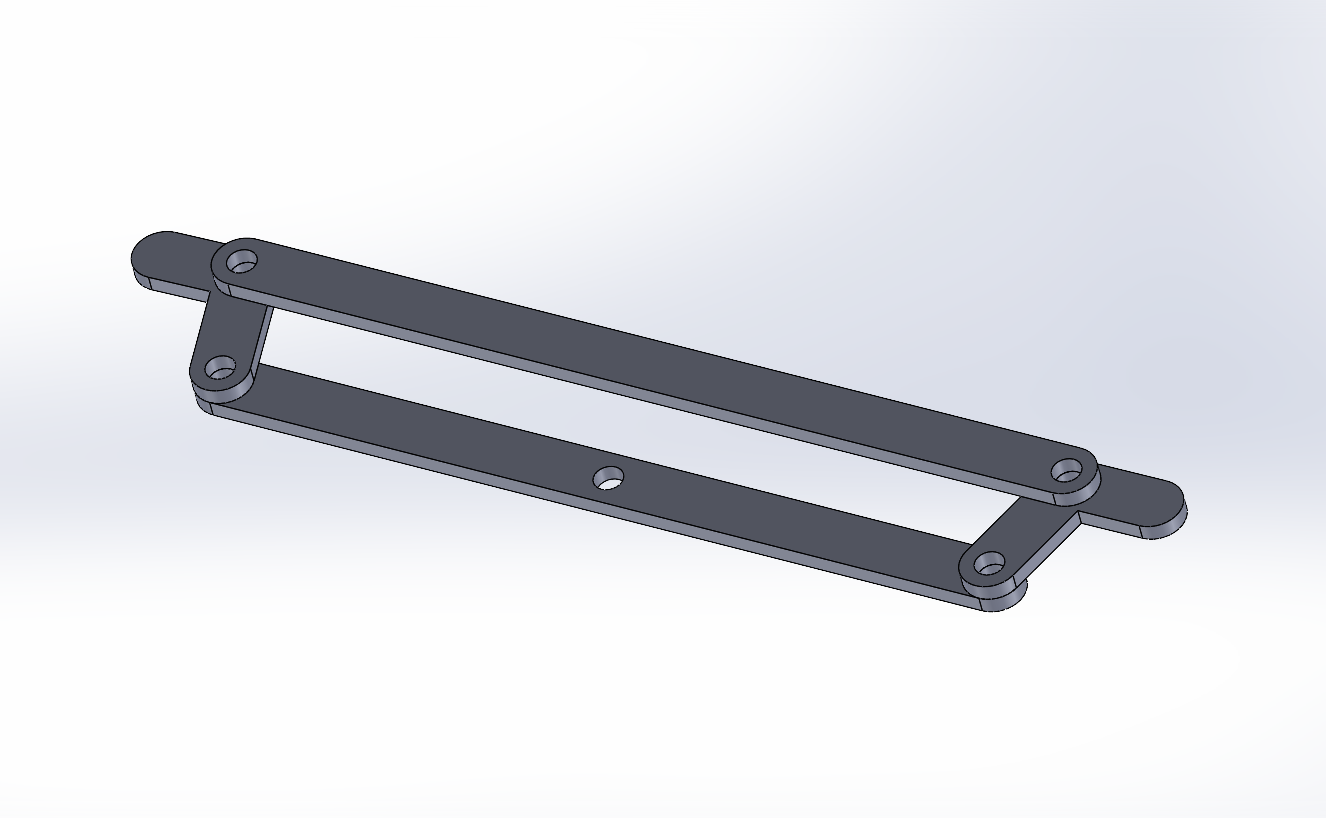
La Base du Châssis (Impression 3D)
La base a été conçue pour servir de squelette rigide. Elle doit accueillir tous les composants électroniques tout en offrant des points d'ancrage solides pour les trains roulants. Nous avons optimisé les dimensions pour permettre au boîtier laser de s'y emboîter parfaitement.
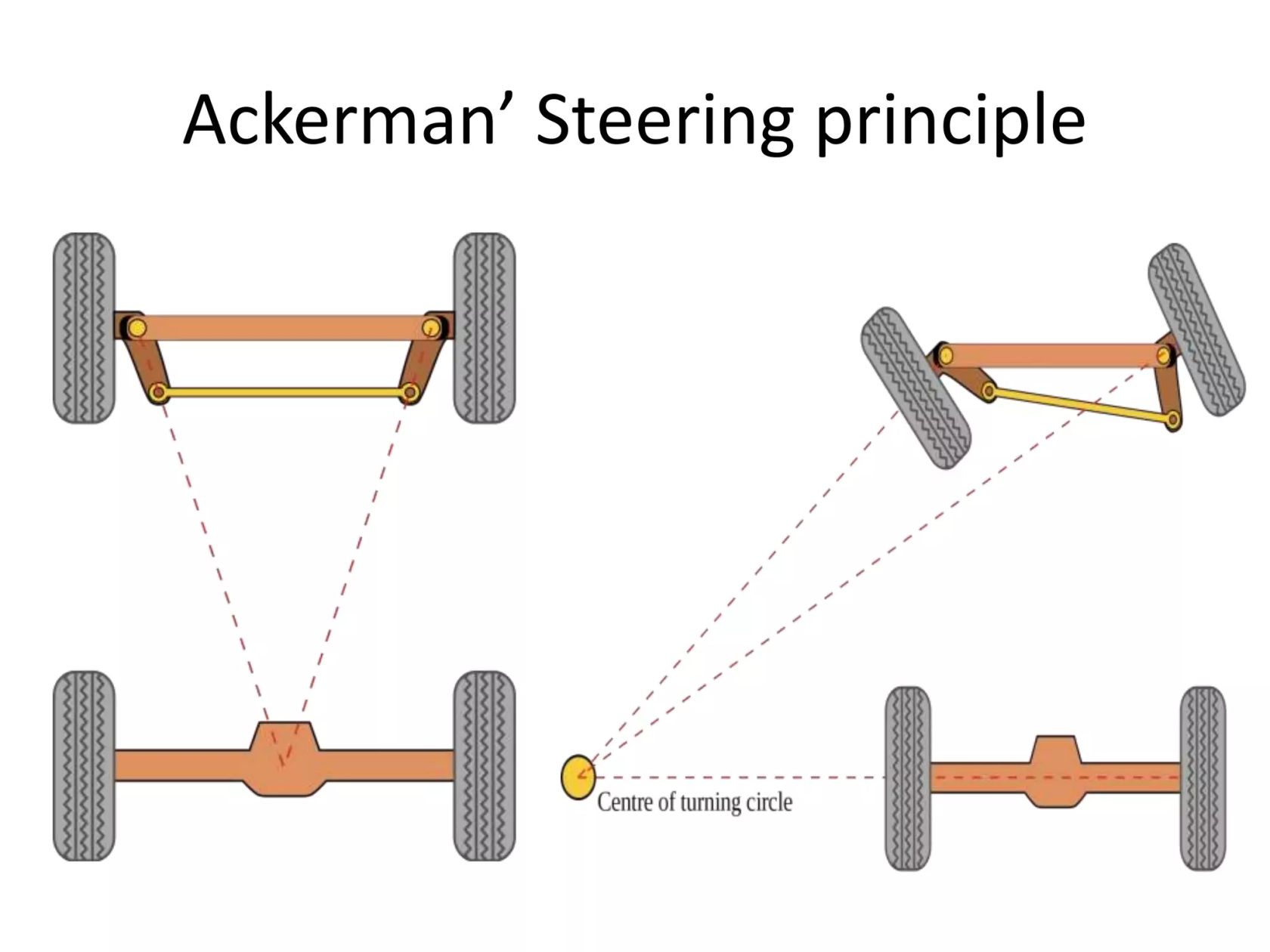
Le Mécanisme de Direction (Ackerman Steering)
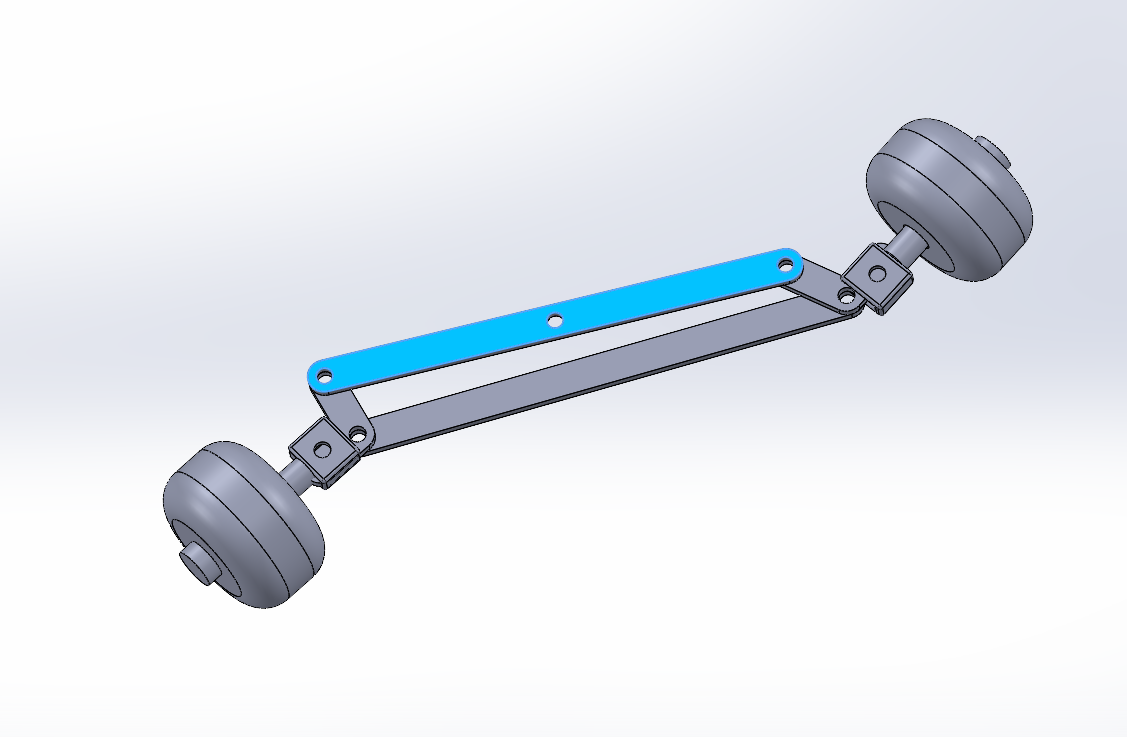
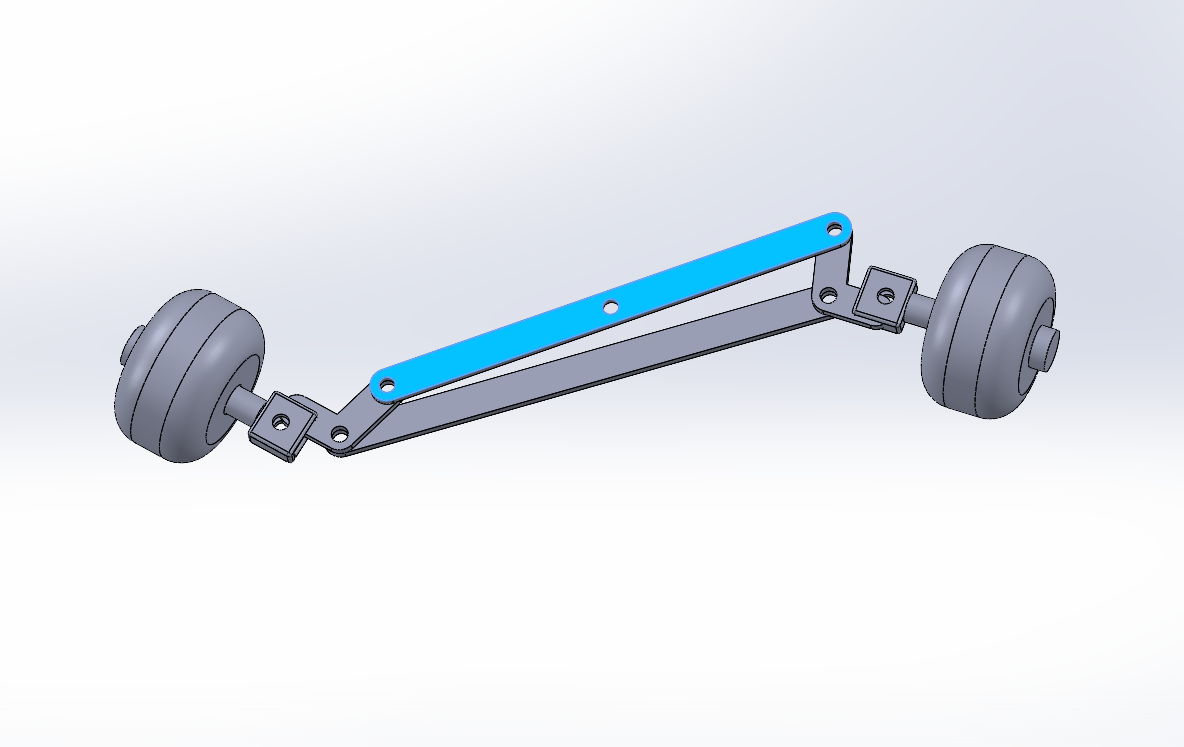
Pour assurer une conduite réaliste, nous avons implémenté le principe de géométrie de direction d'Ackermann. Ce système permet à la roue intérieure de tourner avec un angle plus important que la roue extérieure, évitant ainsi le glissement des pneus dans les virages. Le mouvement est assuré par un servomoteur relié à une tringlerie de direction précise.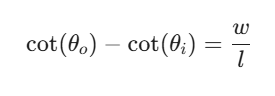
Manipulation Gauche/Droite du mechanisme :
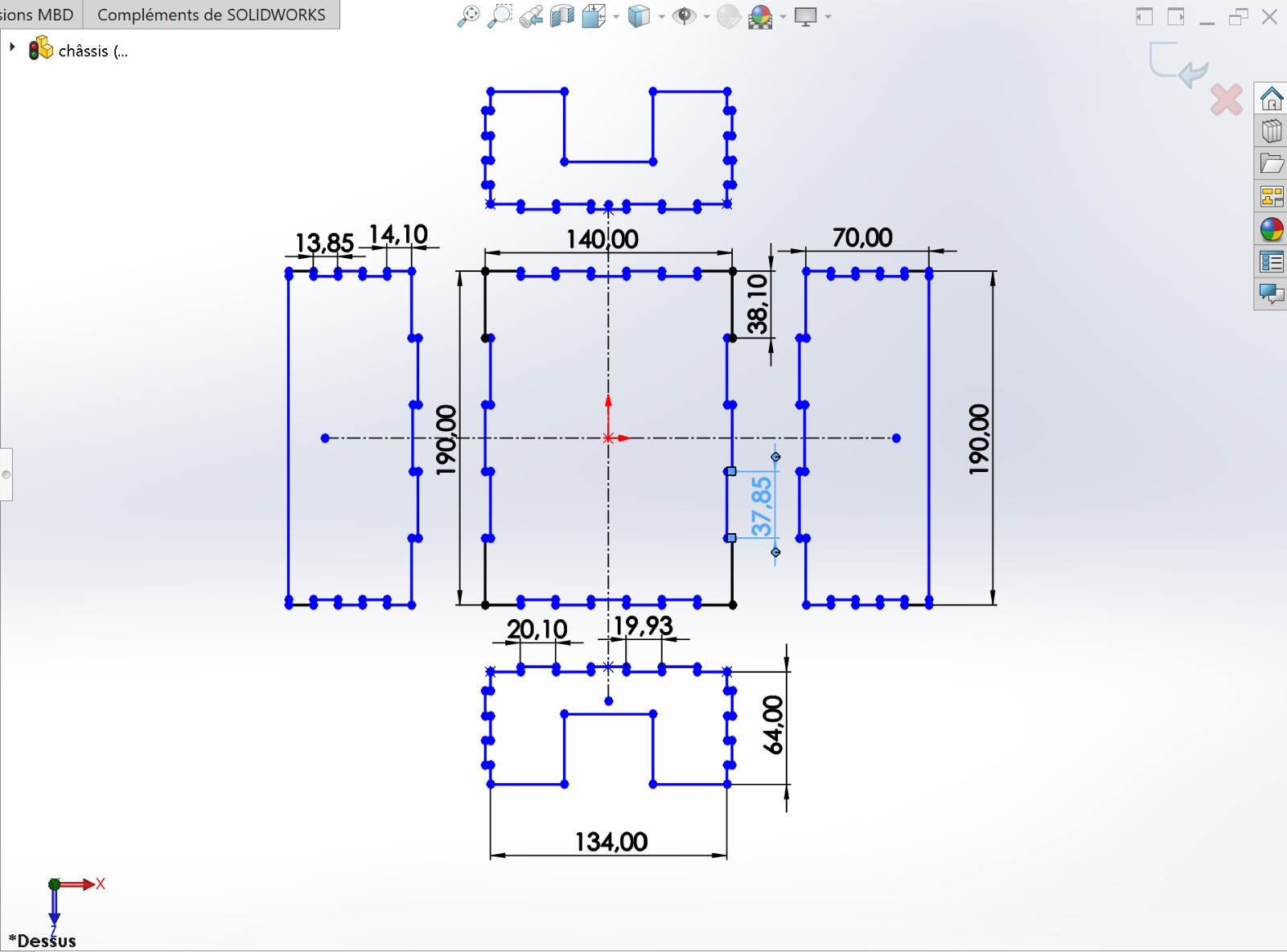
3. Le Boîtier Structurel (Découpe Laser)
Le boîtier supérieur protège l'électronique. Sa conception a été la partie la plus délicate concernant les ajustements de tolérance.
-
Difficulté rencontrée : Le calcul de l'espacement des dents pour l'assemblage par créneaux. Il a fallu ajuster le tracé pour que les parois s'emboîtent sans jeu dans le châssis imprimé, tout en tenant compte du kerf (largeur de coupe) de la Trotec.
- Dimensions : Nous avons utilisé des esquisses SolidWorks précises pour exporter les faces vers Inkscape en format .dxf
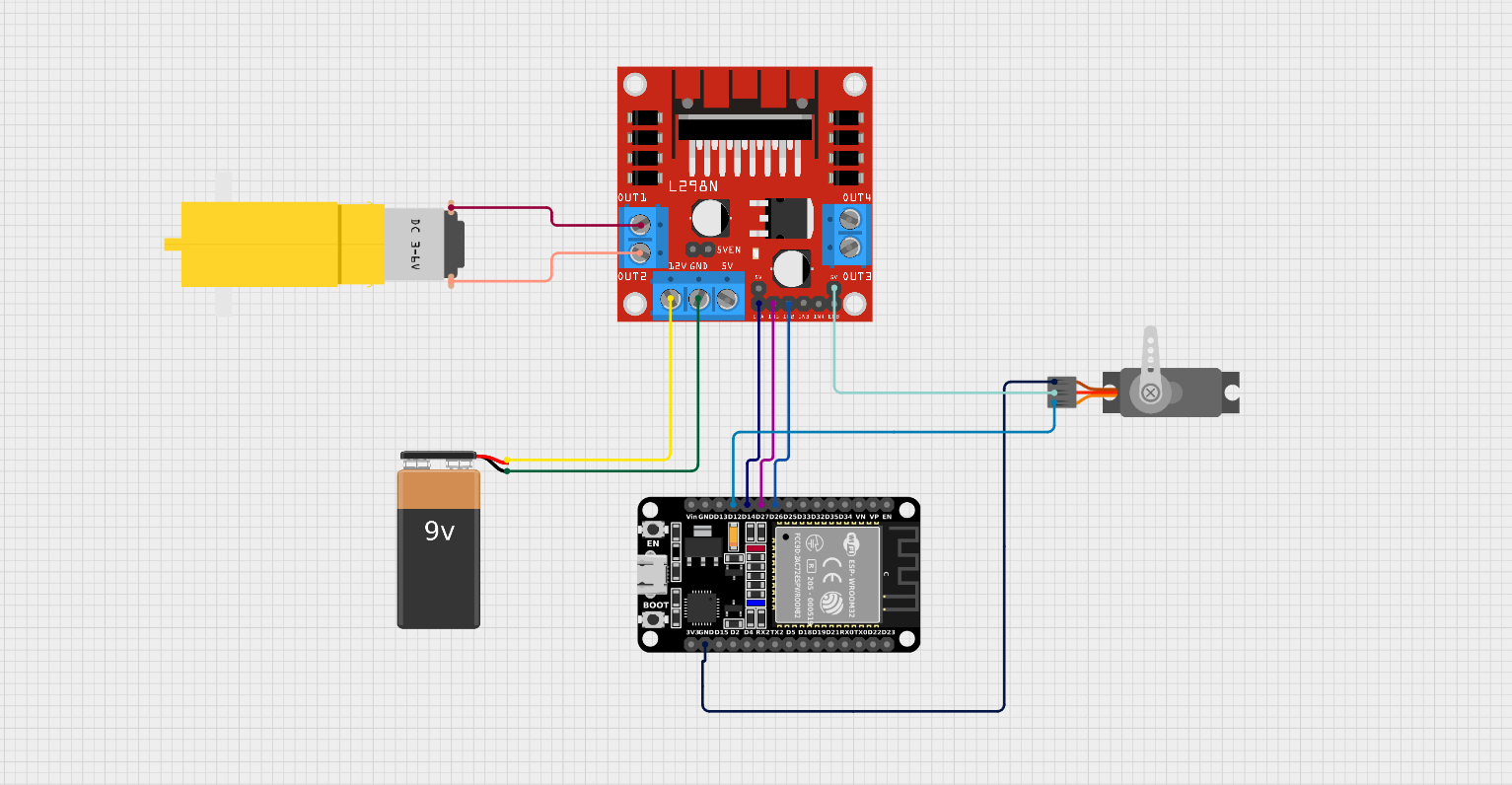
4. Architecture Électronique
Le cerveau de la voiture est une ESP32, choisie pour ses capacités Wi-Fi natives. Elle héberge un serveur web minimaliste permettant de recevoir les commandes HTTP pour diriger les moteurs.
Liste des composants clés
-
Microcontrôleur : ESP32 (Pilotage Wi-Fi).
-
Driver Moteur : L298N (Pont en H pour le moteur DC arrière).
-
Actionneur Direction : Servomoteur (Rotation gauche/droite).
-
Énergie : Batterie 9V montée sur un support accessible pour un remplacement rapide.