StarBot - Groupe 6 - Bastien, Carl, Joyce, Jasmine, Virgile, Elias
OrganisationI de- l'L'équipe
I.1 - Présentation des membres de l'équipe :
II - Organisation des séances
II.1 - 19 Février 2026 - Séance 1
II.1.1 Objectif de la séance
- Test du kit fourni afin de voir les problèmes potentiels
- Création de la page wiki
- Organisation de l'équipe
- Choix des rôles
- Discussion autour de la conception mécanique
Réalisation durant la séance
TousLors lesde objectifsla ontpremière séance, une présentation du projet nous a été réalisés.donné ainsi que la présentation de l'environnement de travail (Fablab) et des machines associées.
Réflexion
Suite Mécaniqueà (prenom)cela,
Testnous avons décidé de tous prendre connaissance du kitcahier (prenom)
des charges pour nous organiser au mieux l'équipe.Ci-après vous trouverez les différentes tâches réalisées ainsi que la/es personnes associées à chaque tâche
Organisation de l'équipe (toute l'équipequipe)
Avant de commencer nous avons réparti les rôles suivants ;
- Responsable Electronique
- Responsable Mécanique
- Responsable informatique
- Chef de projet
Ces rôles n'ont pas pour but la répartition du travail, mais le suivie des tâches dans un domaine particulier.
Réflexion Mécanique (Carl - Jasmine - Elias)
Test du kit (Joyce - Bastien)
Cette partie avait pour but de tester le kit fourni au début du projet afin de s'assurer que chacun des composants fonctionnait de la bonne façon.
Câblage du kit
Grâce à la documentation qui nous a été fournie, nous avons pu suivre étape par étape le branchement que vous retrouvez sur la figure ci-après :
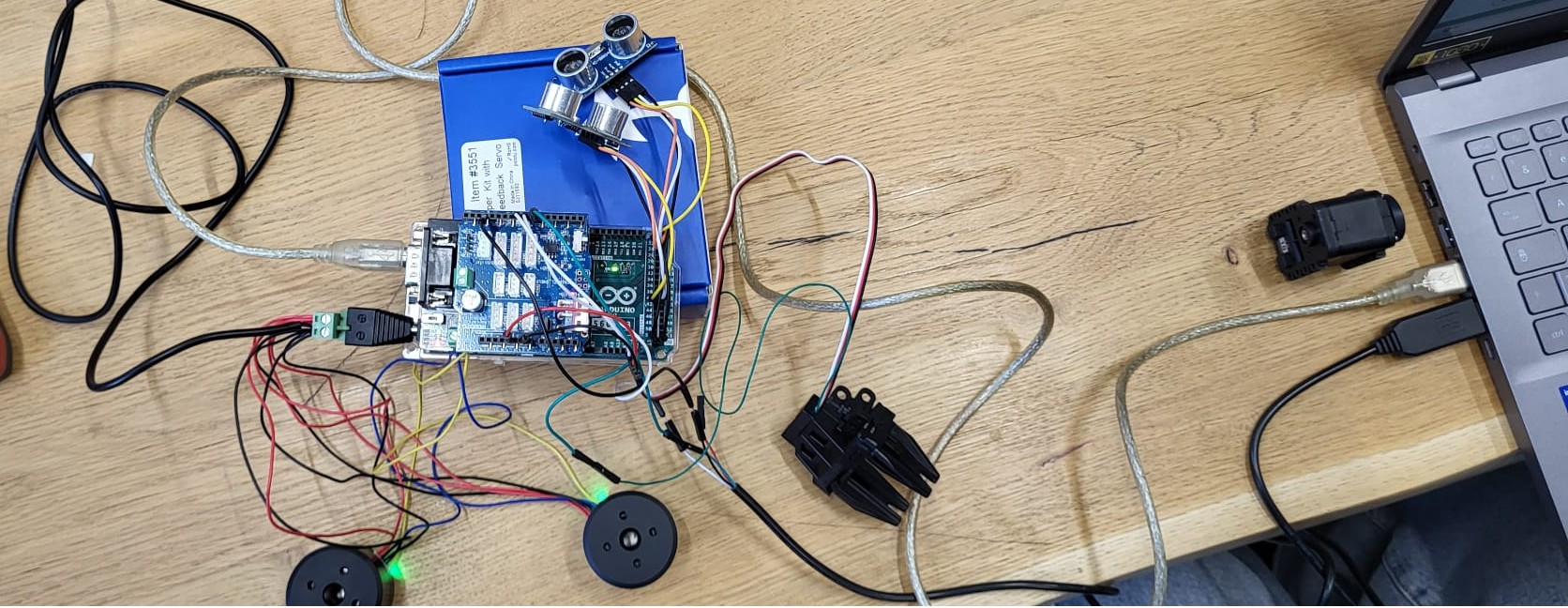
Figure 4 : Câblage Kit de démarrage
Sur la câble ci-dessus, nous avons branché chaque composant nécessaire au projet final (Capteurs ultrasons, Pince, Moteur Dynamixel, Shields arduino). Il est important de voir que l'alimentation 12V est le câble noir situé en haut à gauche de la figure 4.
Après avoir recopié le code qui permet de tester chaque élément du kit, nous avons pu observer le bon fonctionnement de chaque élément. Voir les figure ci-après (VIDEO ???)
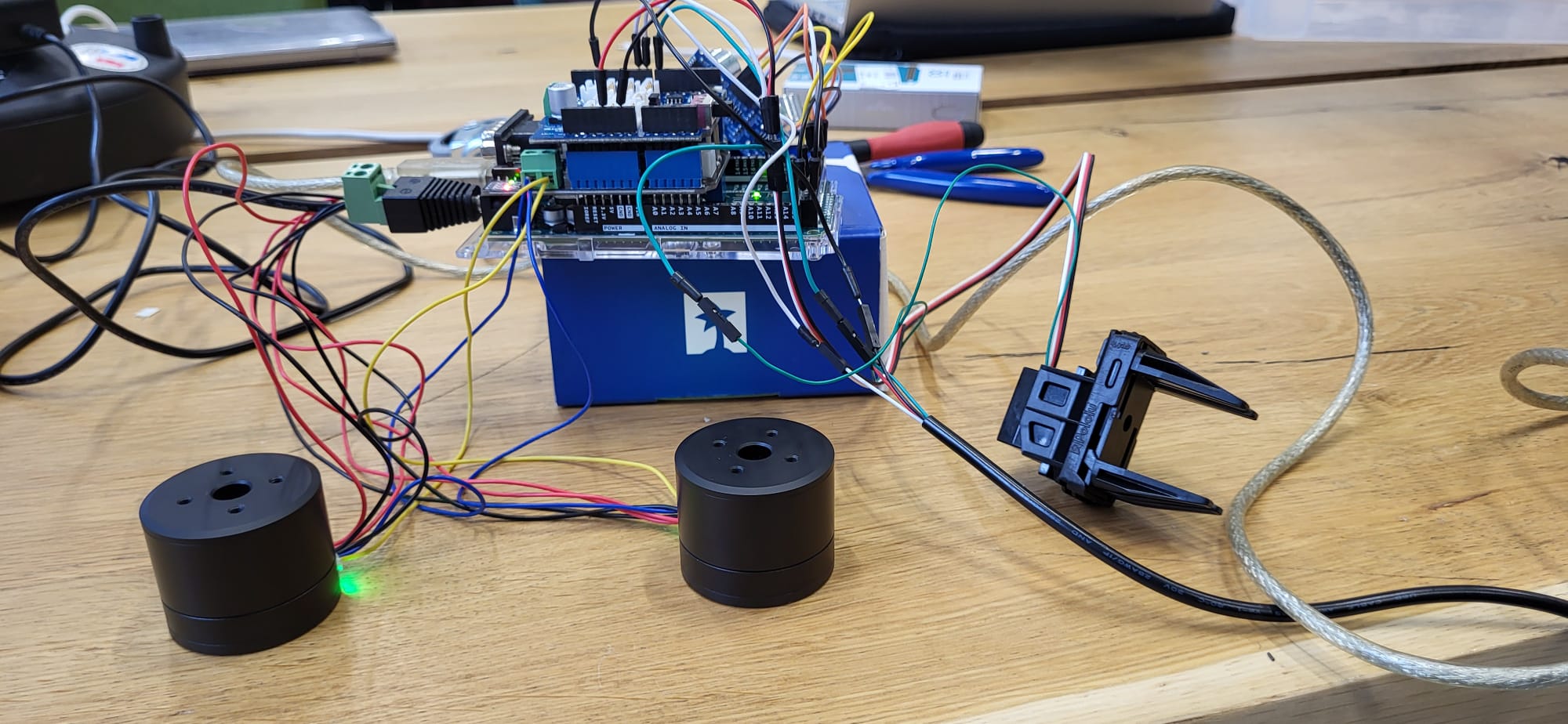
Figure 5 : Illustration du bon fonctionnement des équipements du Kit (pince ouverte, moteur en rotation)
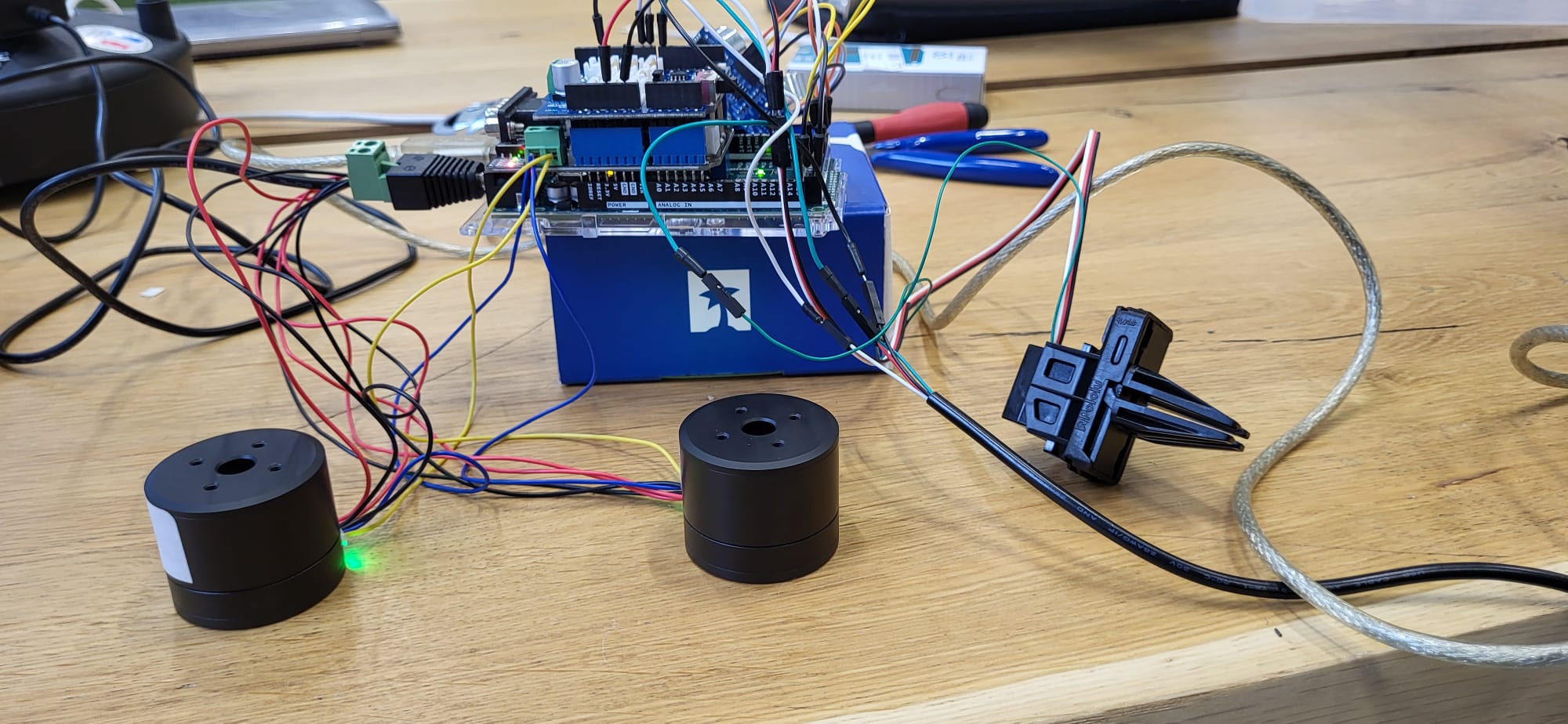
Figure 6 : Illustration du bon fonctionnement des équipements du Kit (pince fermée, moteurs en rotation)
Problème rencontrés
Lors du câblage de l'alimentation 12V avec les moteurs Dynamixel, il nous est apparu que les leds des moteurs - normalement vertes - restées ici éteintes. Nous avons alors décidé de prendre un multimètre et de tester la tension au borne de la batterie. Nous avons relevée une tension de 5V ce qui révèle une batterie défectueuse ou déchargée.
Nous avons alors prix une alimentation symétrique 12V avec des cordons d'alimentation dénudés afin de correctement les brancher aux moteurs.
Création du Wiki (toute l'équipe)
organisationpage
La
Partie 1 : Description des séances
Partie 2 : Réalisation du projet
Objectif prochaine seanceséance (Toute l'équipe)
Après avoir mis en commun le travail avec l'ensemble de l'équipe nous avons décidé des réalisation nécessaire lors de la prochaine séance.
1- gant
2- Algo programme (schéma )
3- Dimensionner les elmtséléments du robot
4- Commencer la conception 3D
5- Commencer la programmation
Réalisation du robot
DescritpionDescription des étapes réalisée une par une
"doc technique"