StarBot - Groupe 6 - Bastien, Carl, Joyce, Jasmine, Virgile, Elias
I - L'équipe
I.1 - Présentation des membres de l'équipe :
II - Organisation des séances
II.1 - 19 Février 2026 - Séance 1
II.1.1 Objectif de la séance
- Test du kit fourni afin de voir les problèmes potentiels
- Création de la page wiki
- Organisation de l'équipe
- Choix des rôles
- Discussion autour de la conception mécanique
Réalisation durant la séance
Lors de la première séance, une présentation du projet nous a été donné ainsi que la présentation de l'environnement de travail (Fablab) et des machines associées.
Suite à cela, nous avons décidé de tous prendre connaissance du cahier des charges pour nous organiser au mieux l'équipe.
Ci-après vous trouverez les différentes tâches réalisées ainsi que la/es personnes associées à chaque tâche
Organisation de l'équipe (toute l'équipe)
Avant de commencer nous avons réparti les rôles suivants ;
- Responsable Electronique
- Responsable Mécanique
- Responsable informatique
- Chef de projet
Ces rôles n'ont pas pour but la répartition du travail, mais le suivie des tâches dans un domaine particulier.
Réflexion Mécanique (Carl - Jasmine - Elias)
Dans cette partie, nous vous présenterons la réflexion que nous avons menée pour arriver au design final de notre robot.
Notre premier design était grandement influencé par celui montré en exemple. Il comportait une liaison glissière permettant de se déplacer sur la hauteur. Cependant, un premier problème s'est posé. La hauteur de notre robot, imposée par les roues, ne nous permettait pas d'atteindre l'objet qui a une hauteur inferieure à celle du robot.
IMAGE DESIGN 1&2
La première solution trouvée à ce problème a été de combiner une liaison glissière et une liaison pivot, comme montré ci dessus. Cela réglait le problème de hauteur du StarBot. En effet, le robot peut maintenant, en reculant, faire baisser la hauteur de la pince plus bas que le robot, attraper et soulever le totem. Comme demandé dans la consigne. Malheureusement, nous disposons uniquement de trois moteurs dont deux sont déjà utilisés pour les roues. Cette solution nécessiterait plus qu'un moteur, ce qui nous a poussé à imaginer un nouveau design.
IMAGE DESIGN FINAL
Enfin, nous avons imaginé un robot en forme de fourche qui prendrait directement le totem sans utiliser de pince. Cette solution a été assez vite abandonnée car elle ne correspondait pas aux attendus. La dernière version, qui est celle qui, selon nous, répond le mieux à nos besoins, est celle où le bras est constitué d'une unique liaison pivot. La pince est avancée par rapport au châssis du robot et la liaison pivot nous permet d'atteindre des hauteurs plus basses que les autres sans pour autant nous compliquer la vie avec plus de moteurs à gérer.
Une fois que ce design a été validé par toute l'equipeéquipe nous avons réfléchis à des solutions pour les autres problèmes qui se posent.
- La roue libre a une hauteur plus grande que les roue motrices. Pour pallier ce problème nous avons pensé a fixer les moteurs sur une plaque qu'on fixera au châssis. Ainsi, en réglant la hauteur de la plaque on compense la hauteur de la roue libre.
- La position de l'ultrason peut être problématique dans certains cas. En effet, l'ultrason posé à l'avant du robot pourra être bloqué par la pince et le totem au moment de la récupération ce qui empêcherait de pouvoir faire les calculs de position pour le chemin retour. Nous avons conclu que le robot pourrait soulever le totem assez haut pour ne pas obstruer le champs d'action des capteurs.
Test du kit (Joyce - Bastien)
Cette partie avait pour but de tester le kit fourni au début du projet afin de s'assurer que chacun des composants fonctionnait de la bonne façon.
Câblage du kit
Grâce à la documentation qui nous a été fournie, nous avons pu suivre étape par étape le branchement que vous retrouvez sur la figure ci-après :
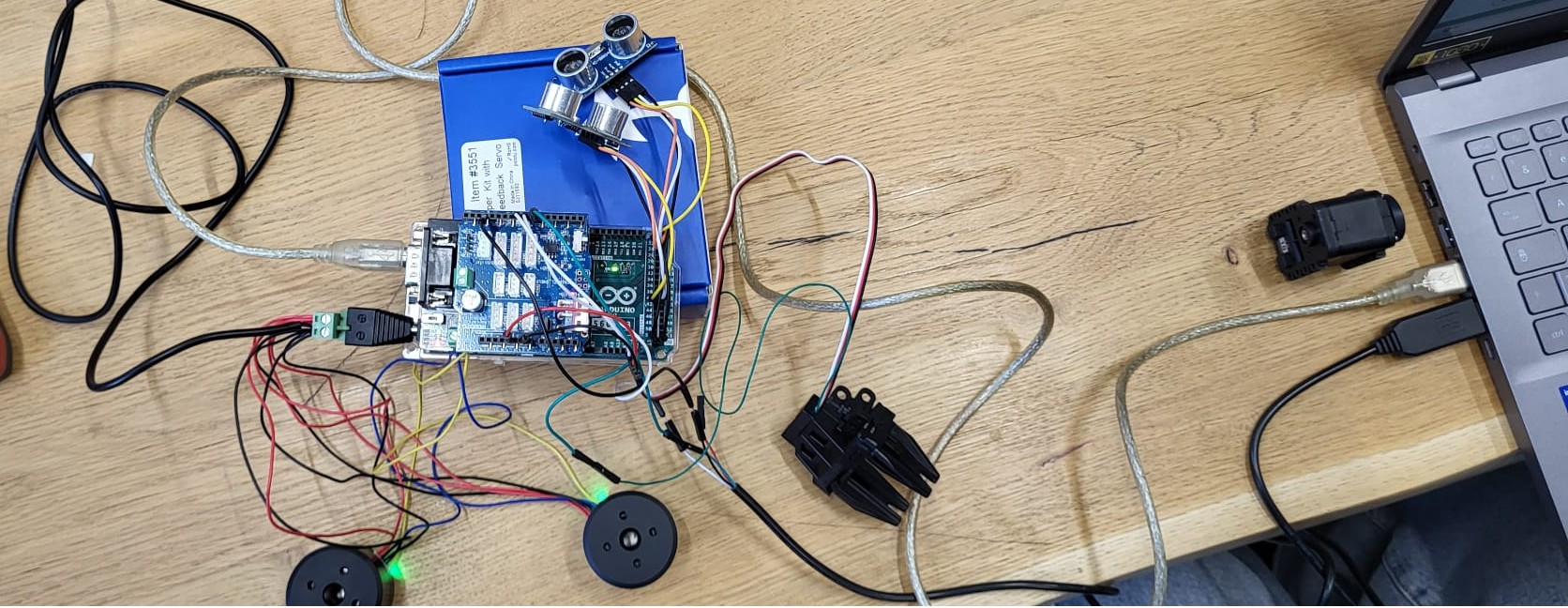
Figure 4 : Câblage Kit de démarrage
Sur la câble ci-dessus, nous avons branché chaque composant nécessaire au projet final (Capteurs ultrasons, Pince, Moteur Dynamixel, Shields arduino). Il est important de voir que l'alimentation 12V est le câble noir situé en haut à gauche de la figure 4.
Après avoir recopié le code qui permet de tester chaque élément du kit, nous avons pu observer le bon fonctionnement de chaque élément. Voir les figure ci-après (VIDEO ???)
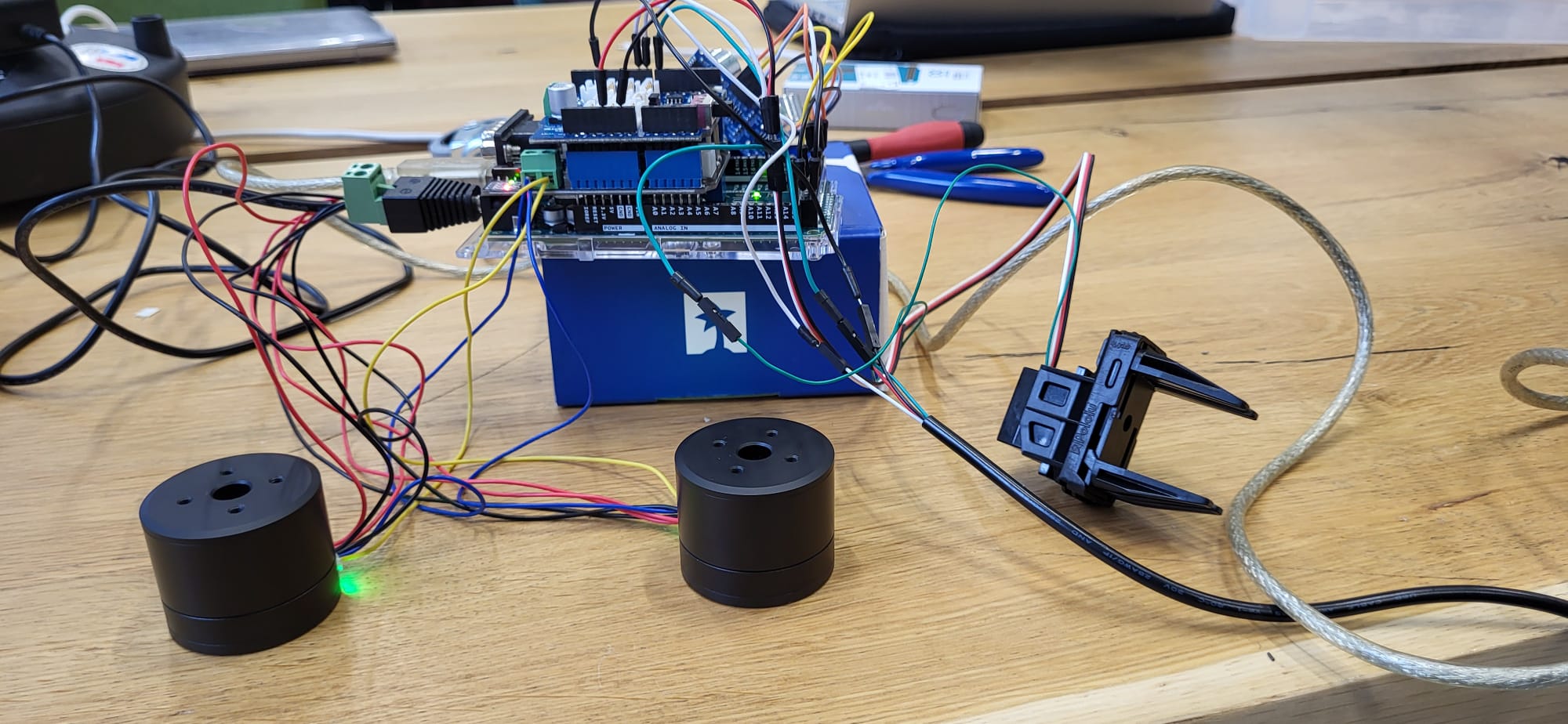
Figure 5 : Illustration du bon fonctionnement des équipements du Kit (pince ouverte, moteur en rotation)
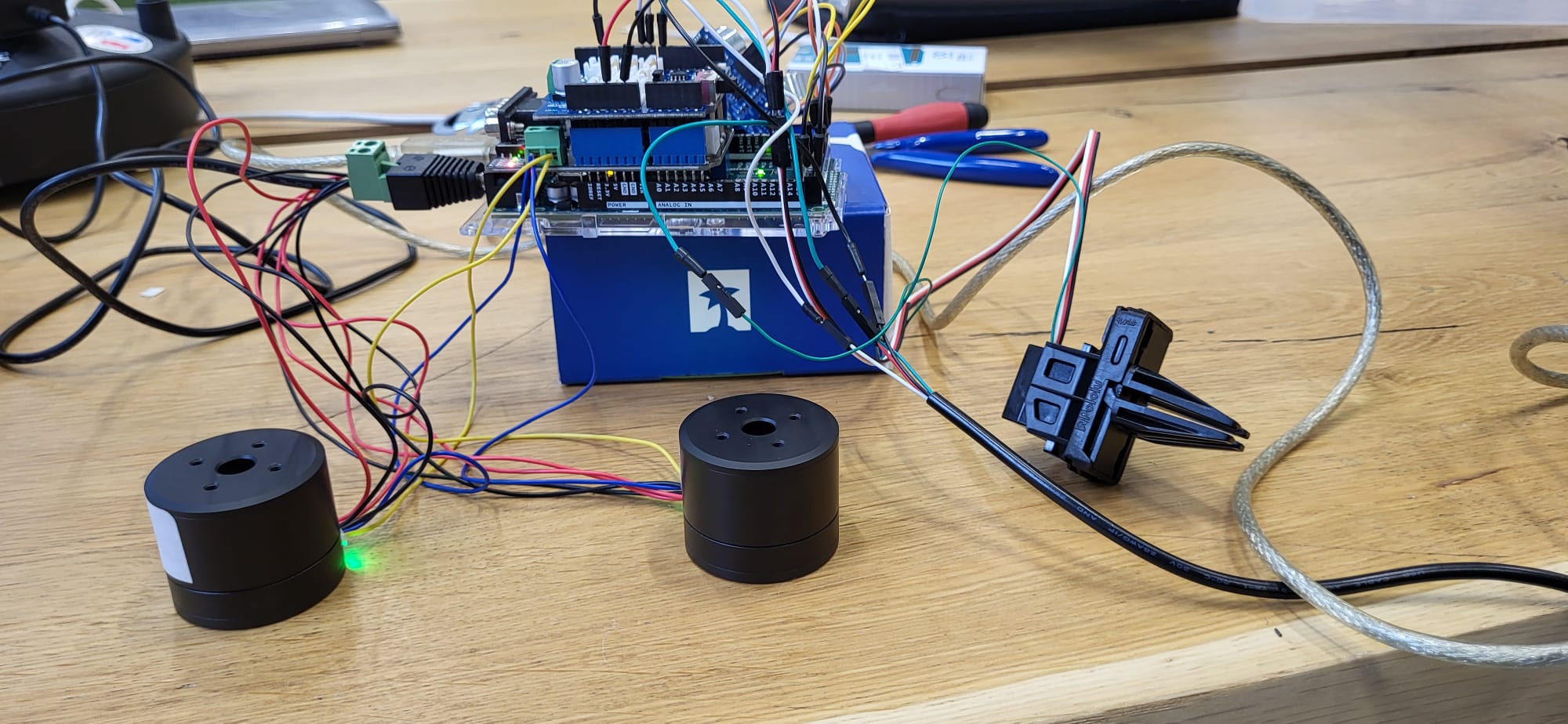
Figure 6 : Illustration du bon fonctionnement des équipements du Kit (pince fermée, moteurs en rotation)
Problème rencontrés
Lors du câblage de l'alimentation 12V avec les moteurs Dynamixel, il nous est apparu que les leds des moteurs - normalement vertes - restées ici éteintes. Nous avons alors décidé de prendre un multimètre et de tester la tension au borne de la batterie. Nous avons relevée une tension de 5V ce qui révèle une batterie défectueuse ou déchargée.
Nous avons alors prix une alimentation symétrique 12V avec des cordons d'alimentation dénudés afin de correctement les brancher aux moteurs.
Création du Wiki (toute l'équipe)
La page Wiki du projet, devant servir à la traçabilité de nos séance ainsi qu'à la potentielle réalisation du projet par un étudiant tiers au projet nous avons décidé de construire la page de la façon suivante :
Partie 1 : Description des séances
Partie 2 : Réalisation du projet
Objectif prochaine séance (Toute l'équipe)
Après avoir mis en commun le travail avec l'ensemble de l'équipe nous avons décidé des réalisation nécessaire lors de la prochaine séance.
1- gant
2- Algo programme (schéma )
3- Dimensionner les éléments du robot
4- Commencer la conception 3D
5- Commencer la programmation
Réalisation du robot
Description des étapes réalisée une par une
"doc technique"