Encodeur magnétique
Nous avons dû réaliser un capteur (encodeur magnétique) custom-made pour le robot:
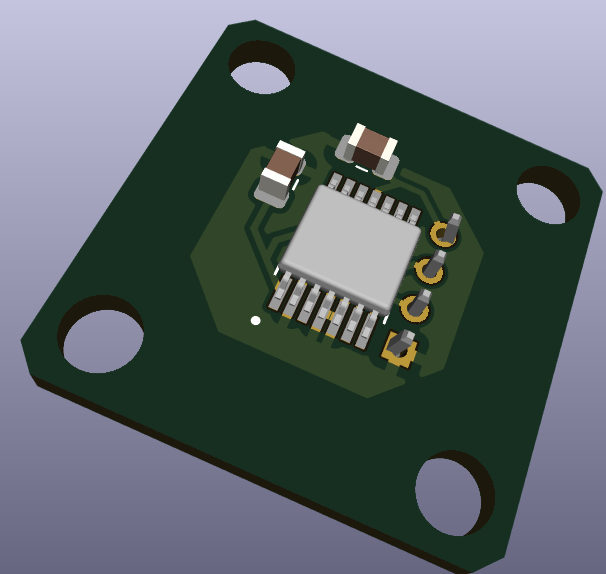
Représentation 3D du circuit
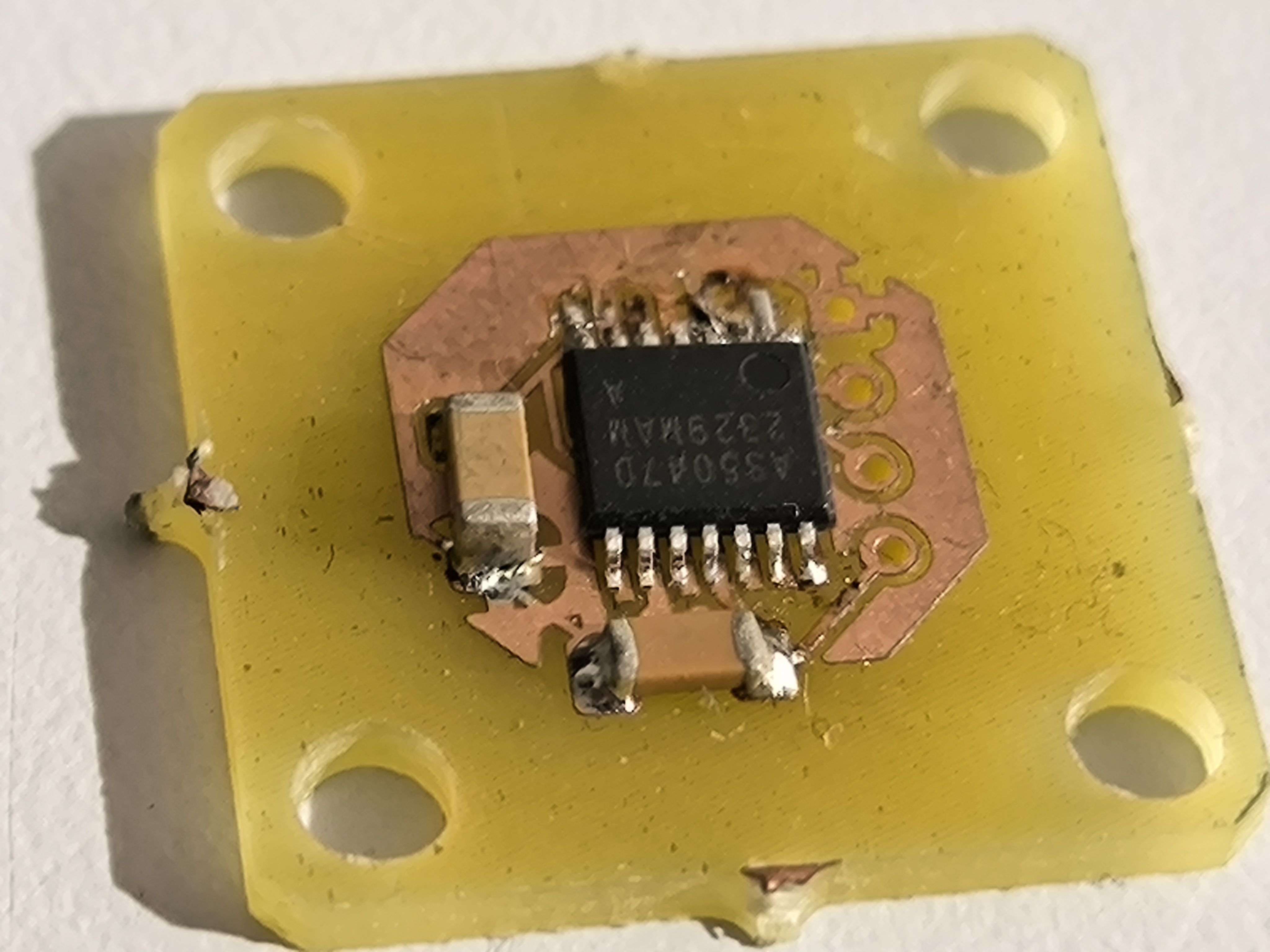
PCB réalisé au Fablab
Nous avons dû réaliser un capteur (encodeur magnétique) custom-made pour le robot:
Représentation 3D du circuit
PCB réalisé au Fablab