Introduction
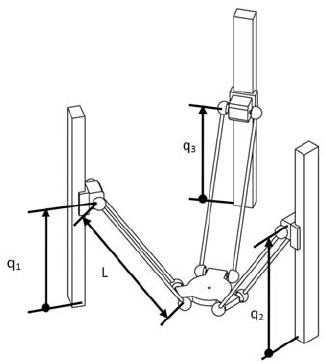
Le Tripteron est une machine faisant partie de la famille des robots parallèles1. inventée en 2004 à l'Université de Laval à partir de recherches théoriques2.
Sa particularité, comme d'autres robots parallèles, est que l'élément terminal est relié à la base par plusieurs chaînes cinématiques qui sont découplées/indépendantes ; alors que les robots sériels possèdent leur chaînes cinématiques (et leurs degrés de liberté) reliés.
Exemple:
| Parallel Robots | Serial Robots |
Delta Robot (1985) |
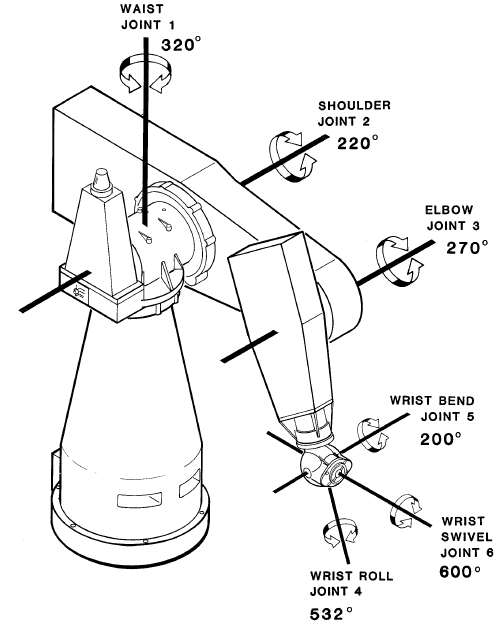
Puma Robot (1980) |
Le but du projet sera de construire ce manipulateur parallèle et de l'équiper de plusieurs éléments terminaux interchangeables pour diverses applications (impression 3D, découpe laser, jet d'encre, pince de préhension, etc).
Bibliographie:
- Ré
ferencesférences sur les robots parallèles:les - (disponible sur Primo):
Parallel Robots, Merlet Jean-Pierre
Structural synthesis of parallel robots, Gogu Grigore, Gladwell Graham, Maurice Leslie
2. Laboratoire de robotique: Tripteron et Quadrupteron (mécanismes à 3 et 4 ddl) (ulaval.ca)
1.