Seance-1
Durant cette séance, on a avancé sur plusieurs fronts concernant la conception et la simulation de notre bras robotique.
On a d'abord réfléchi au design global du bras, notamment au nombre de degrés de liberté à lui donner. On s'est orienté vers une architecture à 4-5 DDL avec des liaisons pivots, ce qui nous a semblé le meilleur compromis pour couvrir un rayon de mouvement suffisant. On a aussi commencé à se pencher sur la cinématique directe et inverse, qui sera centrale pour la suite du projet.
En parallèle, on a travaillé sur le dimensionnement mécanique : après analyse des efforts et moments appliqués sur le bras, on a fixé sa longueur à environ 30 cm. On a également sélectionné les moteurs adaptés à chaque articulation selon le couple nécessaire. Après analyse, nous avons déduit que pour la base et le bras, deux moteurs FB5118M (10kg·cm) seraient suffisants. Pour l’articulation de l’´épaule, un moteur plus puissant SER0030 (20kg·cm) est n´nécessaire pour supporter le poids et les moments plus importants. Enfin, pour l’avant-bras et la pince, deux moteurs SER0051 (5kg·cm chacun) permettent d’assurer les mouvements sans risque des surcharge. Ce choix de moteurs permet d’´équilibrer performance et sécurite, tout en optimisant la consommation et la compacité du système
Du côté simulation, on a essayé de prendre en main Genesis avec un robot Franka pour tester un système de pick and place. On a aussi commencé à modéliser le bras sur SolidWorks en vue de l'intégrer dans le simulateur.
Problèmes rencontrés
- Fixation de la pince dans Genesis : lors du pick and place, l'objet s'attachait au bras mais n'était pas correctement "collé" à la pince, ce qui causait des décalages pendant la simulation. On a dû retravailler le code pour corriger ça.
- Conversion STL → XML : on n'a pas réussi à convertir proprement notre modèle SolidWorks en fichier XML compatible avec Genesis. Des problèmes de position, rotation et fixation des pièces entre elles sont apparus. Ce point sera le principal objectif de la prochaine séance, en passant par OnShape.
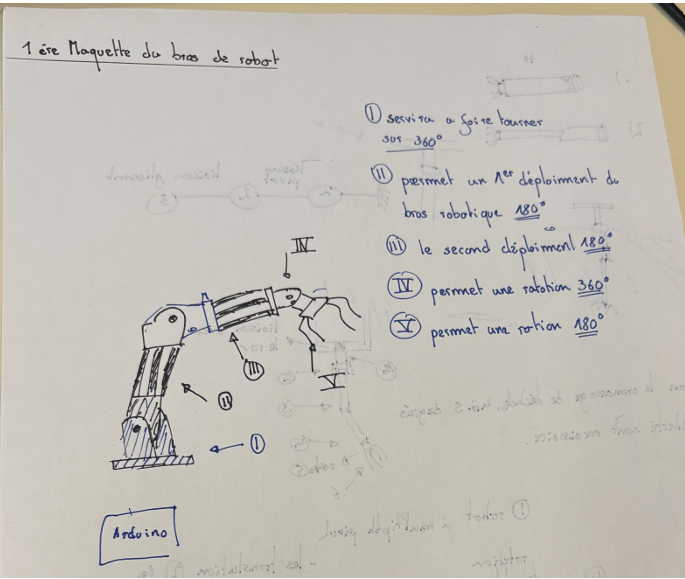
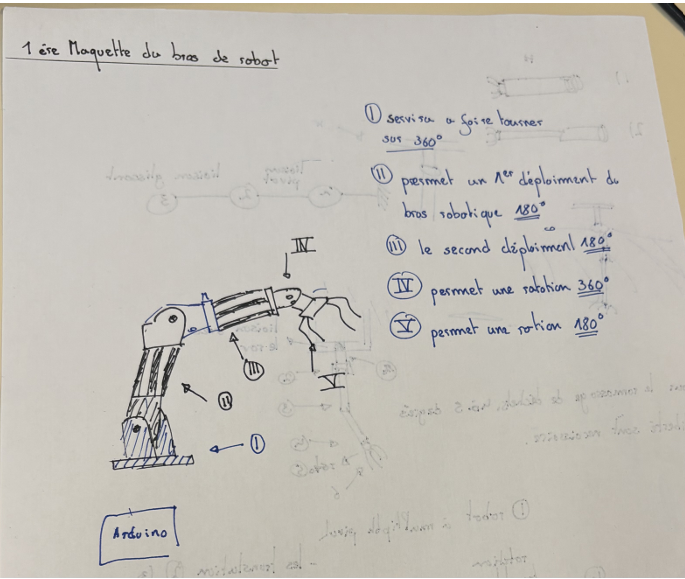 Schéma du bras robotique.
Schéma du bras robotique.
No Comments