Projet ROB3: Rami, Yannis, Vasilis
Dossier de Préconception
Informations
Membres
TOBBAL Yannis: tobbalya@gmail.com
ARIDI Rami: rami.aridi@etu.sorbonne-universite.fr
SKARLEAS Vasileios: vasileios.skarleas@etu.sorbonne-universite.fr
Cursus
Polytech 3eme année | Spécialité: Robotique
Délais
Début: 14/02/24
Fin: 23/05/24
Cahier des charges
But
Le but est de créer un robot capable de dessiner différentes formes sur une feuille de papier. Il doit pouvoir réaliser des formes préprogrammée ainsi qu'être contrôlé manuellement.
Objectifs
Le robot est fixé sur un support carré horizontal comportant une zone de dessin de 10*10 cm. Il y a 2 exercice qu'il doit réussir
Exercice 1
Dessiner des formes prédéfinies
Le robot doit être capable de réaliser en 10 +- 0.2 secondes:
-Une ligne droite de 5cm
-Une ligne droite de 5cm en pointillés
-Un cercle de 2.5cm de rayon
-Un cercle de 2.5cm de rayon en pointillés
Exercice 2
Permettre à un utilisateur de dessiner
L'utilisateur doit être capable d'utiliser le robot pour dessiner la forme qu'il veut sur la zone de dessin. Le robot est contrôlé par un joystick qui doit donc être doté des fonctions utilisés dans l'exercice 1 (Déplacement, relever le stylo etc...)
Besoins
Il faut donc créer un robot qui:
- Maintienne un effecteur (le stylo) afin de dessiner
- Se déplace:
- Dans un plan horizontal: Créer les formes
- Verticalement: Dessiner ou non, pour les pointillés
- Enregistre des formes prédéfinies
- Soit capable d'être contrôlé précisément par le joystick
Matériel
Copié du sujet
- Un crayon
- Interface de commande :
- Une carte arduino UNO avec câble USB-B;
- Un joystick:
- Une platine de protoypage;
- Alimentation régulée 5V ;
- Câbles, LEDs, boutons poussoirs, résistances.
- Motorisation :
- Deux servomoteurs HS422 180°;
- Un servomoteur Emax ES08A 180°.
- Mécanique :
- Matière PLA pour impression 3D;
- Feuilles medium : 3mm et 6mm d'épaisseur;
- Vis et écrous : M2, M2.5, M3, M4.
- Roulements et axes de diamètre 4mm.
- Informatique
- Ressources CAO.zip contient les fichiers Solidworks pour les deux modèles de servomoteurs
- datasheets.zip contient les documentations de quelques-uns des composants fourni
Machines utilisées
Trotec Speedy 100
Idées

Idée 1 - Robot de roues
Robot à roue
Idée 2 - 3D Printing
Inspiration de 3D
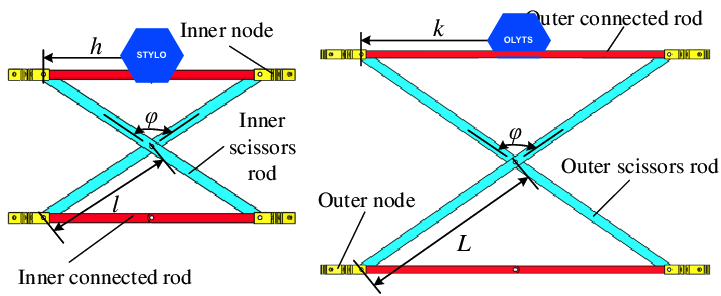
Idée 3 - Scissors mecanism
Inspirés du "Scissors mechanism", on voudrait attacher deux servomoteurs à la base du mécanisme et un système de commande d'actionneur au point "STYLO". Cette pleins des avanatges telles que :
- Nous pouvons avoir un espace d'écriture plus grand grâce à la tendance du mécanisme à s'étendre
FacilitezFaciliter la création de cercles- Ainsi que des lignes droites dans le même sens du stylo très précis
Malheureusement, cette solution présente également un inconvénient. Les mouvements étant plutôt révolutionnaires, créer des lignes droites verticales du stylo semble limité et dans certains cas extrêmes impossible.
Idée 4 - Point d'intersection
Idee de Rami
Décision
Notre décision finale est de créer un robot simplifié inspiré de SCARA. Il s'agit d'un robot de deux articulations (mouvement rotoïde) et d'un effecteur avec un répére perpendiculaire à celle des articulations du robot, tout en supportant un mécanisme de commande du stylo.
Cette décission est basé sur les points des vues suivantes:
- Idée robot de roues
- Ce robot faudrait être basé sur la principe d'odommétrie et sans un capteur des rotations, l'asservissement du mouvement d'un point de vue informatique semble non fiable.
- L'utilisation des servomoteurs avec de roues
standardstandards (demander à Yanis) pourraient reagir sur la precision et
- 3D Printing idea
- Scissors mechanism idea
- Selon la mécanique de la piéce, la création des lignes droites perpandiculaires du stylo n'est pas toujours possible à cause des mouvements revolutionaires du mécanisme
- Idée point d'intersection
- Il s'agit d'une idée très complet. Cependant, l'existence du jeu et l'exigence d'exercer une force assez grande dans les extrémités pour que le stylo pourrait se deplacer aux coordonées, demandent une conception des piéces qui sont
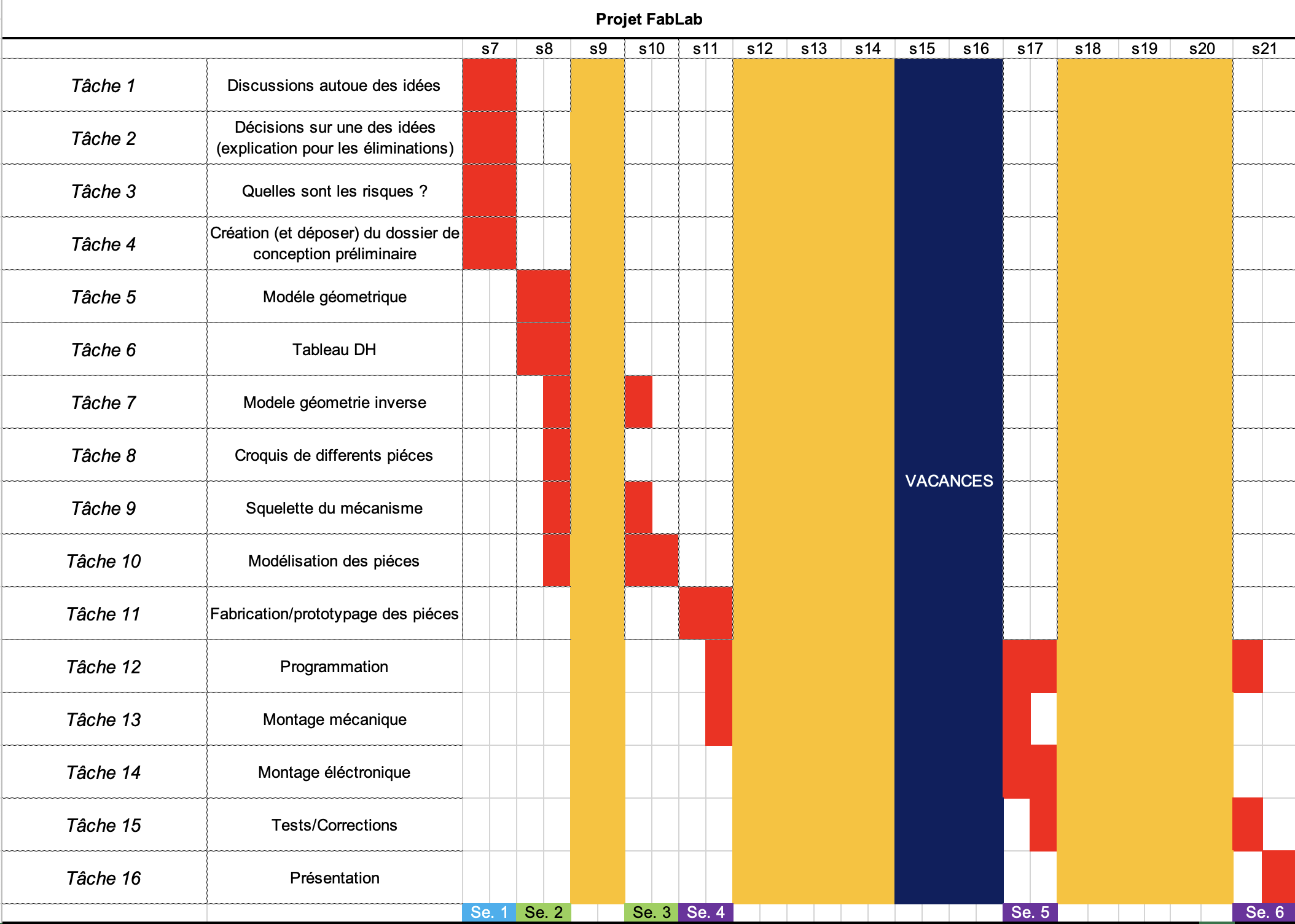
GANTT
Il y a un lien intéractif qui est mis à jour à chaque modification via https://docs.google.com/spreadsheets/d/1DHF06YVmrLnYdHjBLUIrWymk2NDsXfCw9xsFZvuKmwk/edit?usp=sharing
Concéption
Schéma Cinématique + Tableau DH
Il est disponible sur: Schéma Cinématique.pdf
| Frame |
θi+1 | di+1 |
ai |
αi |
| 0 |
θ1 |
h0 |
0 |
0 |
| 1 |
θ2 |
h1 |
L1 |
0 |
| 2 |
θ3 |
0 |
L2 + L3 |
π/2 |
\frac{a|b}+\sqrt{a+b|3}+\int{a|b}dx+\overbrace{a-b|n+1}+\overarc{ABC}+\hat{ABC}+\left\UparrowH\index{2}0\right\Uparrow
Réalisation
Journal de bord / Caléndrier
Avancée du projet à chaque étape, difficultés rencontrées, modifications et adaptations
14/02/2024
Discussion autour du Projet Robotique ROB3 - différents idées, décission, planning.
11/04/2022
Phasellus in purus quis justo feugiat vestibulum quis eu lacus. 😎 Etiam maximus metus vel massa pharetra convallis. Curabitur vel nunc orci. Praesent dolor dui, laoreet non massa non, pellentesque vestibulum quam. Sed posuere, dui quis semper pulvinar, eros nibh commodo elit, nec auctor arcu est et purus.
18/04/2022
Maecenas interdum turpis sit amet rutrum elementum. Aenean eget accumsan ligula. Phasellus et scelerisque lectus. Cras vel venenatis nulla. Integer tristique non diam et molestie. Pellentesque condimentum enim arcu, in commodo nunc commodo vel. Integer vitae neque facilisis, mattis elit sit amet, gravida turpis. Maecenas lectus mauris, fringilla ut lectus eu, condimentum finibus tortor 🤩🤩🤩