Projet ROB3-A Robot écrivain : Bastien Antonin Antonin
Un modèle de documentation minimal pour tous les types de projets. Toutes les catégories ci-dessous doivent être renseignées, même de façon succincte.
IMPORTANT : Merci de sélectionner le / les tags adéquats dans le menu de droite, et de ne pas créer de nouveau tag.
Les fichiers sources doivent idéalement être joints à cette page grâce à l'icône trombone du menu de droite.
Des hésitations sur comment bien documenter et utiliser l'interface ? Consultez le tutoriel "Comment documenter"
Informations
| COUQUE Bastien | bastien.couque@etu.sorbonne-universite.fr |
Étudiant Robotique 3-A Polytech Sorbonne |
| CHAUVET Antonin | antonin.chauvet@etu.sorbonne-universite.fr |
Étudiant Robotique 3-A Polytech Sorbonne |
| CENSIER Antonin |
Étudiant Robotique 3-A Polytech Sorbonne |
Date de début de Projet : 8 FévrierJanvier 2024
Date de fin du Projet : 30 mai 2024
Contexte
Ce projet de robotique s'inscrit dans le cadre de nos études d'ingénieur en robotique, en première année du cursus d'ingénieur à Polytech Sorbonne.Nous effectuerons ce projet par groupe de 3 afin d'apprendre la gestion de projet en équipe tel que nous serons amenés à effectuer à l'avenir en milieu professionnel. Nous aurons un total de 6 séances de 3h30 afin de mener à bien ce projet et d'en faire une démonstration.
Robotique
Objectifs
L'objectif principal de ce projet est de concevoir et réaliser un système robotique, c'est-à-dire sa partie mécanique, sa motorisation, sa commande et son interface de pilotage. Les fonctions que notre système robotique doit être capable de réaliser sont :
- Tracer, avec l'aide d'un crayon fixé sur l'organe terminal du robot une ligne de 5 cm de long, une ligne pointillée de 5cm de long, un cercle de 2,5 cm de rayonne,rayon, un cercle pointillé de 2,5 cm de rayonne.rayon.
Le tracé de chacune des figures doit être réalisé en 10 secondes +/- 0,2 secondes.
- Tracer, avec l'l’aide d'd’un crayon fixé sur l'l’organe terminal du robot, un dessin imposé dans un carré de 5cm par 5cm. Le déplacement de l'l’organe terminal du robot devra être piloté par un joystick . Il est possible que la figure soit discontinue, et donc il faut prévoir de pouvoir relever le crayon du support horizontal sur lequel on écrit.
Une fonction supplémentaire, optionnelle , peut être réalisée :
- Être capable de modifier la vitesse de déplacement du robot via
l'l’interface.
Nous garderons un tête, tout le long du projet, l'objectif de minimiser la quantité de matière utilisée pour le mener à bien.
L'objectif reste avant tout d'apprendre par la pratique les bases de la gestion d'un projet (c'est-à-dire la façon de s'organiser en équipe pour atteindre un objectif donné avec des moyens donnés) que d' aboutir à un prototype fonctionnel.

Ajouter au moins une image de votre projet
Matériel
Un1crayonplanche de CP peuplier 3mm (dimensions 300*600mm)Interfacescotch decommande :Une carte arduino UNO avec câble USB-B;peintre
Uncollejoystick:à boisUnecoupeur- papier de
protoypage;verre Alimentationgrainréguléemoyen5V ;Câbles, LEDs, boutons poussoirs, résistances.
Deux servomoteurs HS422 180°;Un servomoteur Emax ES08A 180°.
Matière PLA pour impression 3D;Feuilles medium : 3mm et 6mm d'épaisseur;Vis et écrous : M2, M2.5, M3, M4.Roulements et axes de diamètre 4mm.
(80-100)
Machines utilisées
ImprimanteTrotec 3DDécoupe laserSpeedy100
Construction
(Fichiers, photos, code, explications, paramètres d'usinage, photos, captures d'écran...)
Étape 1
La première étape de notre projet était de poser sur une feuilles toutes nos idées. Trois d'entre elles ont eu le mérite d'être schématiser.
La première solution serait un robot à deux roues, avec en un point du châssis, son effecteur. Il y aurait un moteur pour chaque roue ainsi qu'un moteur pour lever l'effecteur.
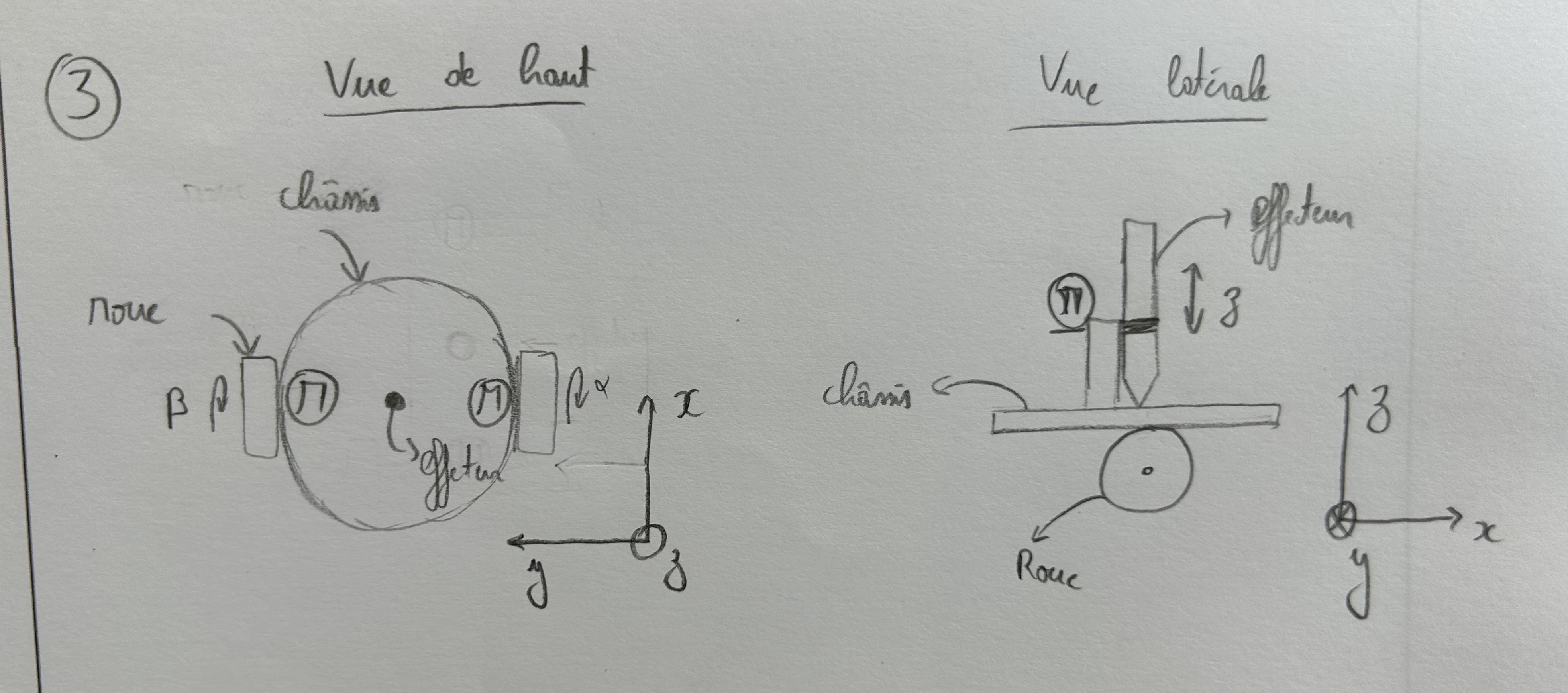
Seulement ce robot nous pose quelques problèmes.
- précision de l'odométrie
- utilisation de servomoteurs pour contrôler la rotation des roues
- l'équilibre globale du robot
- positionnement sur la feuille, il est demandant de l'endroit où nous le posons
Cette option propose néanmoins des avantages.
- Compact
- possibilité d'expansion au de-là de la feuille
- Peu de matériel
La deuxième solution est un bras, constitué de deux articulations, une base et un effecteur. Il y aurait donc un moteur par articulation. Pour répondre au cahier des charges il faudrait aussi permettre une translation sur la hauteur afin de contrôler le contact entre l'effecteur et la feuille.

Voici les avantages que présente cette option :
- Guidages des déplacements dans le plan de la feuille simplifiés comparés aux autres
- Utilisation des servomoteurs simplifié
- modèle géométrique de la position de l'effecteur simplifiÉ
- Positionnement simplifé
Défauts :
- placement des moteurs
- guidage de la translation selon l'axe z
La dernière solution imaginée est inspiré du fonctionnement d'une imprimante 3D. Le déplacement de l'éfcetuer s'effectue selon deux translations dans le plan. La première consiste a déplacer l'effecteur suivant un rail horizontal et la seconde consiste à déplacer le rail précédent sur un second rail horitonal. Ces deux mouvements
Étape 2
----
Étape 23
----
Étape 3
----
Journal de bord
Avancée du projet à chaque étape, difficultés rencontrées, modifications et adaptations (facultatif pour les petits projets)
08/02/202403/04/2022
Duis tincidunt Mattis sollicitudin. Énéen possède sapien a metus consectetur, ut blandit tellus finibus. Vivamus convallis tincidunt metus, ut fringilla eros gravida nec. Cras dignissim urna et vestibulum feugiat. Phasellus tempor, nunc quis lobortis volutpat, dolor arcu fermentum elit, in eleifend enim sem fringilla metus. 🚨Donec quis libero vehicula, divers tortor quis, vehicula libero !!! Cras ultricies tempus ante gravida hendrerit.
15/02/202411/04/2022
Phasellus in purus quis justo feugiat vestibulum quis eu lacus. 😎 Etiam maximus metus vel massa pharetra convallis. Curabitur vel nunc orci. Praesent dolor dui, laoreet non massa non, pellentesque vestibulum quam. Sed posuere, dui quis sempre pulvinar, eros nibh commodo elit, nec auctor arcu est et purus.
28/02/202418/04/2022
Mécène interdum turpis sit amet rutrum elementum. Énéen eget accumsan ligula. Phasellus et scelerisque lectus. Cras vel venenatis nulla. Entier tristique non diam et molestie. Condimentum pellentesque enim arcu, in commodo nunc commodo vel. Entier vitae neque facilisis, mattis elit sit amet, gravida turpis. Mécène lectus mauris, fringilla ut lectus eu, condimentum finibus tortor 🤩🤩🤩
07/03/2024
Mécène interdum turpis sit amet rutrum elementum. Énéen eget accumsan ligula. Phasellus et scelerisque lectus. Cras vel venenatis nulla. Entier tristique non diam et molestie. Condimentum pellentesque enim arcu, in commodo nunc commodo vel. Entier vitae neque facilisis, mattis elit sit amet, gravida turpis. Mécène lectus mauris, fringilla ut lectus eu, condimentum finibus tortor 🤩🤩🤩
02/05/2024
Mécène interdum turpis sit amet rutrum elementum. Énéen eget accumsan ligula. Phasellus et scelerisque lectus. Cras vel venenatis nulla. Entier tristique non diam et molestie. Condimentum pellentesque enim arcu, in commodo nunc commodo vel. Entier vitae neque facilisis, mattis elit sit amet, gravida turpis. Mécène lectus mauris, fringilla ut lectus eu, condimentum finibus tortor 🤩🤩🤩
30/05/2024
Mécène interdum turpis sit amet rutrum elementum. Énéen eget accumsan ligula. Phasellus et scelerisque lectus. Cras vel venenatis nulla. Entier tristique non diam et molestie. Condimentum pellentesque enim arcu, in commodo nunc commodo vel. Entier vitae neque facilisis, mattis elit sit amet, gravida turpis. Mécène lectus mauris, fringilla ut lectus eu, condimentum finibus tortor 🤩🤩🤩