Projet Prototypage Sanjay Ryan Ossian


#include <Wire.h>
#include "paj7620.h"
#include <Servo.h>
#define GES_REACTION_TIME 500
#define GES_ENTRY_TIME 800
#define GES_QUIT_TIME 1000
#define LED_PIN A2
#define SERVO_PIN 9
Servo myservo;
void setup() {
pinMode(LED_PIN, OUTPUT);
digitalWrite(LED_PIN, LOW); // Assurez-vous que la LED est éteinte au démarrage
myservo.attach(SERVO_PIN);
myservo.write(90); // Position neutre du servo
Serial.begin(9600);
Serial.println("\nPAJ7620U2 TEST DEMO: Recognize gestures.");
uint8_t error = paj7620Init();
if (error) {
Serial.print("INIT ERROR, CODE:");
Serial.println(error);
} else {
Serial.println("INIT OK");
}
Serial.println("Please input your gestures:\n");
}
void loop() {
uint8_t data = 0;
uint8_t error = paj7620ReadReg(0x43, 1, &data);
if (!error) {
switch (data) {
case GES_LEFT_FLAG:
digitalWrite(LED_PIN, HIGH); // Allumer la LED
myservo.write(180); // Déplacer le servo à 180°
Serial.println("LED ON - Servo 180 - Left Gesture");
delay(500); // Laisser le temps au servo de bouger
break;
case GES_RIGHT_FLAG:
digitalWrite(LED_PIN, LOW); // Éteindre la LED
myservo.write(0); // Déplacer le servo à 0°
Serial.println("LED OFF - Servo 0 - Right Gesture");
delay(500); // Laisser le temps au servo de bouger
break;
default:
break;
}
}
delay(100);
}
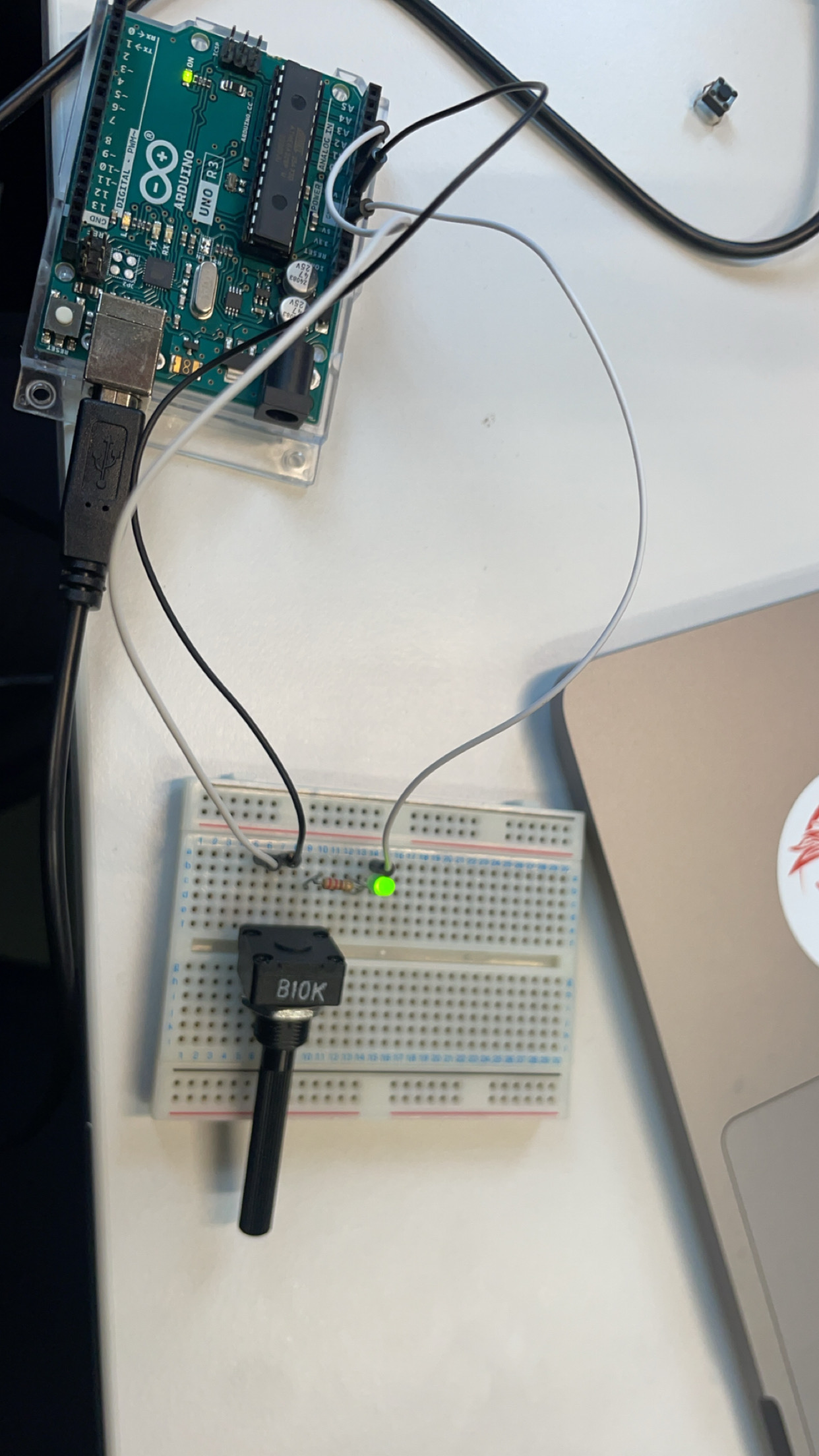
montage :