Projet Prototypage Sanjay Ryan Ossian


Ce code est un programme Arduino qui utilise le capteur PAJ7620U2 pour détecter et reconnaître 9 gestes différents,rents, puis afficher le résultat sur le moniteur série.rie.
/*
* Copyright (c) 2015 seeed technology inc.
* Website : www.seeed.cc
* Author : Wuruibin
* Modified Time: June 2015
* Description: This demo can recognize 9 gestures and output the result, including move up, move down, move left, move right,
* move forward, move backward, circle-clockwise, circle-counter clockwise, and wave.
*
* The MIT License (MIT)
*
* Permission is hereby granted, free of charge, to any person obtaining a copy
* of this software and associated documentation files (the "Software"), to deal
* in the Software without restriction, including without limitation the rights
* to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
* copies of the Software, and to permit persons to whom the Software is
* furnished to do so, subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in
* all copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
* FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
* AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
* LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
* OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
* THE SOFTWARE.
*/
#include <Wire.h>
#include "paj7620.h"
/*
Notice: When you want to recognize the Forward/Backward gestures, your gestures' reaction time must less than GES_ENTRY_TIME(0.8s).
You also can adjust the reaction time according to the actual circumstance.
*/
#define GES_REACTION_TIME 500 // You can adjust the reaction time according to the actual circumstance.
#define GES_ENTRY_TIME 800 // When you want to recognize the Forward/Backward gestures, your gestures' reaction time must less than GES_ENTRY_TIME(0.8s).
#define GES_QUIT_TIME 1000
void setup()
{
uint8_t error = 0;
Serial.begin(9600);
Serial.println("\nPAJ7620U2 TEST DEMO: Recognize 9 gestures.");
error = paj7620Init(); // initialize Paj7620 registers
if (error)
{
Serial.print("INIT ERROR,CODE:");
Serial.println(error);
}
else
{
Serial.println("INIT OK");
}
Serial.println("Please input your gestures:\n");
}
void loop()
{
uint8_t data = 0, data1 = 0, error;
error = paj7620ReadReg(0x43, 1, &data); // Read Bank_0_Reg_0x43/0x44 for gesture result.
if (!error)
{
switch (data) // When different gestures be detected, the variable 'data' will be set to different values by paj7620ReadReg(0x43, 1, &data).
{
case GES_RIGHT_FLAG:
delay(GES_ENTRY_TIME);
paj7620ReadReg(0x43, 1, &data);
if(data == GES_FORWARD_FLAG)
{
Serial.println("Forward");
delay(GES_QUIT_TIME);
}
else if(data == GES_BACKWARD_FLAG)
{
Serial.println("Backward");
delay(GES_QUIT_TIME);
}
else
{
Serial.println("Right");
}
break;
case GES_LEFT_FLAG:
delay(GES_ENTRY_TIME);
paj7620ReadReg(0x43, 1, &data);
if(data == GES_FORWARD_FLAG)
{
Serial.println("Forward");
delay(GES_QUIT_TIME);
}
else if(data == GES_BACKWARD_FLAG)
{
Serial.println("Backward");
delay(GES_QUIT_TIME);
}
else
{
Serial.println("Left");
}
break;
case GES_UP_FLAG:
delay(GES_ENTRY_TIME);
paj7620ReadReg(0x43, 1, &data);
if(data == GES_FORWARD_FLAG)
{
Serial.println("Forward");
delay(GES_QUIT_TIME);
}
else if(data == GES_BACKWARD_FLAG)
{
Serial.println("Backward");
delay(GES_QUIT_TIME);
}
else
{
Serial.println("Up");
}
break;
case GES_DOWN_FLAG:
delay(GES_ENTRY_TIME);
paj7620ReadReg(0x43, 1, &data);
if(data == GES_FORWARD_FLAG)
{
Serial.println("Forward");
delay(GES_QUIT_TIME);
}
else if(data == GES_BACKWARD_FLAG)
{
Serial.println("Backward");
delay(GES_QUIT_TIME);
}
else
{
Serial.println("Down");
}
break;
case GES_FORWARD_FLAG:
Serial.println("Forward");
delay(GES_QUIT_TIME);
break;
case GES_BACKWARD_FLAG:
Serial.println("Backward");
delay(GES_QUIT_TIME);
break;
case GES_CLOCKWISE_FLAG:
Serial.println("Clockwise");
break;
case GES_COUNT_CLOCKWISE_FLAG:
Serial.println("anti-clockwise");
break;
default:
paj7620ReadReg(0x44, 1, &data1);
if (data1 == GES_WAVE_FLAG)
{
Serial.println("wave");
}
break;
}
}
delay(100);
}
Ce code est un programme Arduino qui utilise le capteur PAJ7620U2 pour détecter des gestes et allumer/éteindre une LED en fonction des mouvements de la main.
#include <Wire.h>
#include "paj7620.h"
#define GES_REACTION_TIME 500
#define GES_ENTRY_TIME 800
#define GES_QUIT_TIME 1000
#define LED_PIN A2
void setup() {
pinMode(LED_PIN, OUTPUT);
digitalWrite(LED_PIN, LOW); // Assurez-vous que la LED est éteinte au démarrage
Serial.begin(9600);
Serial.println("\nPAJ7620U2 TEST DEMO: Recognize gestures.");
uint8_t error = paj7620Init();
if (error) {
Serial.print("INIT ERROR, CODE:");
Serial.println(error);
} else {
Serial.println("INIT OK");
}
Serial.println("Please input your gestures:\n");
}
void loop() {
uint8_t data = 0;
uint8_t error = paj7620ReadReg(0x43, 1, &data);
if (!error) {
switch (data) {
case GES_LEFT_FLAG:
digitalWrite(LED_PIN, HIGH); // Allumer la LED
Serial.println("LED ON - Left Gesture");
delay(GES_QUIT_TIME);
break;
case GES_RIGHT_FLAG:
digitalWrite(LED_PIN, LOW); // Éteindre la LED
Serial.println("LED OFF - Right Gesture");
delay(GES_QUIT_TIME);
break;
default:
break;
}
}
delay(100);
}
Ce code est un programme Arduino qui utilise un capteur de reconnaissance de gestes PAJ7620U2 pour contrôler une LED et un servo-moteur en fonction des gestes détectés.
#include <Wire.h>
#include "paj7620.h"
#include <Servo.h>
#define GES_REACTION_TIME 500
#define GES_ENTRY_TIME 800
#define GES_QUIT_TIME 1000
#define LED_PIN A2
#define SERVO_PIN 9
Servo myservo;
void setup() {
pinMode(LED_PIN, OUTPUT);
digitalWrite(LED_PIN, LOW); // Assurez-vous que la LED est éteinte au démarrage
myservo.attach(SERVO_PIN);
myservo.write(90); // Position neutre du servo
Serial.begin(9600);
Serial.println("\nPAJ7620U2 TEST DEMO: Recognize gestures.");
uint8_t error = paj7620Init();
if (error) {
Serial.print("INIT ERROR, CODE:");
Serial.println(error);
} else {
Serial.println("INIT OK");
}
Serial.println("Please input your gestures:\n");
}
void loop() {
uint8_t data = 0;
uint8_t error = paj7620ReadReg(0x43, 1, &data);
if (!error) {
switch (data) {
case GES_LEFT_FLAG:
digitalWrite(LED_PIN, HIGH); // Allumer la LED
myservo.write(180); // Déplacer le servo à 180°
Serial.println("LED ON - Servo 180 - Left Gesture");
delay(500); // Laisser le temps au servo de bouger
break;
case GES_RIGHT_FLAG:
digitalWrite(LED_PIN, LOW); // Éteindre la LED
myservo.write(0); // Déplacer le servo à 0°
Serial.println("LED OFF - Servo 0 - Right Gesture");
delay(500); // Laisser le temps au servo de bouger
break;
default:
break;
}
}
delay(100);
}
Projet Impression 3D : 4 dés
Nous avons décidé d'imprimer des Dés avec des faces personnalisé pour cela nous avons utilisé le dé disponible dans l'inventaire de tinkercad puis il a fallu faire a la main les face, c'est à dire modéliser les nombre à partir de demi-sphére, d'étoiles et de lettres : voici une vue du dessus
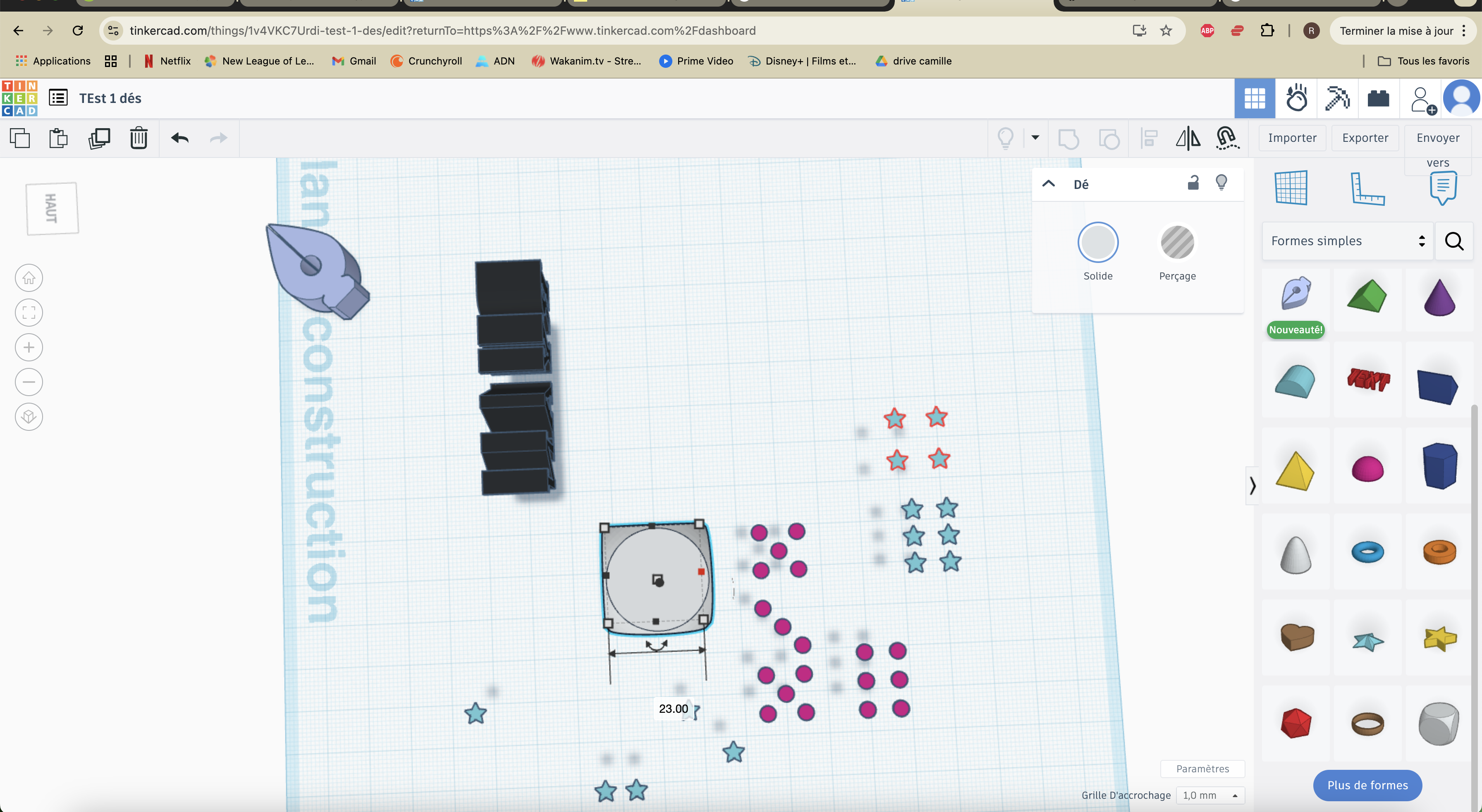
Apres avoir ajusté la hauteur on utilise le perçage sur les nombre et on regroupe avec le dé puis nous avons dupliqué les dés et changé les orientations pour pouvoir comparer les faces et voir le degrés de précision selon l'orientation.
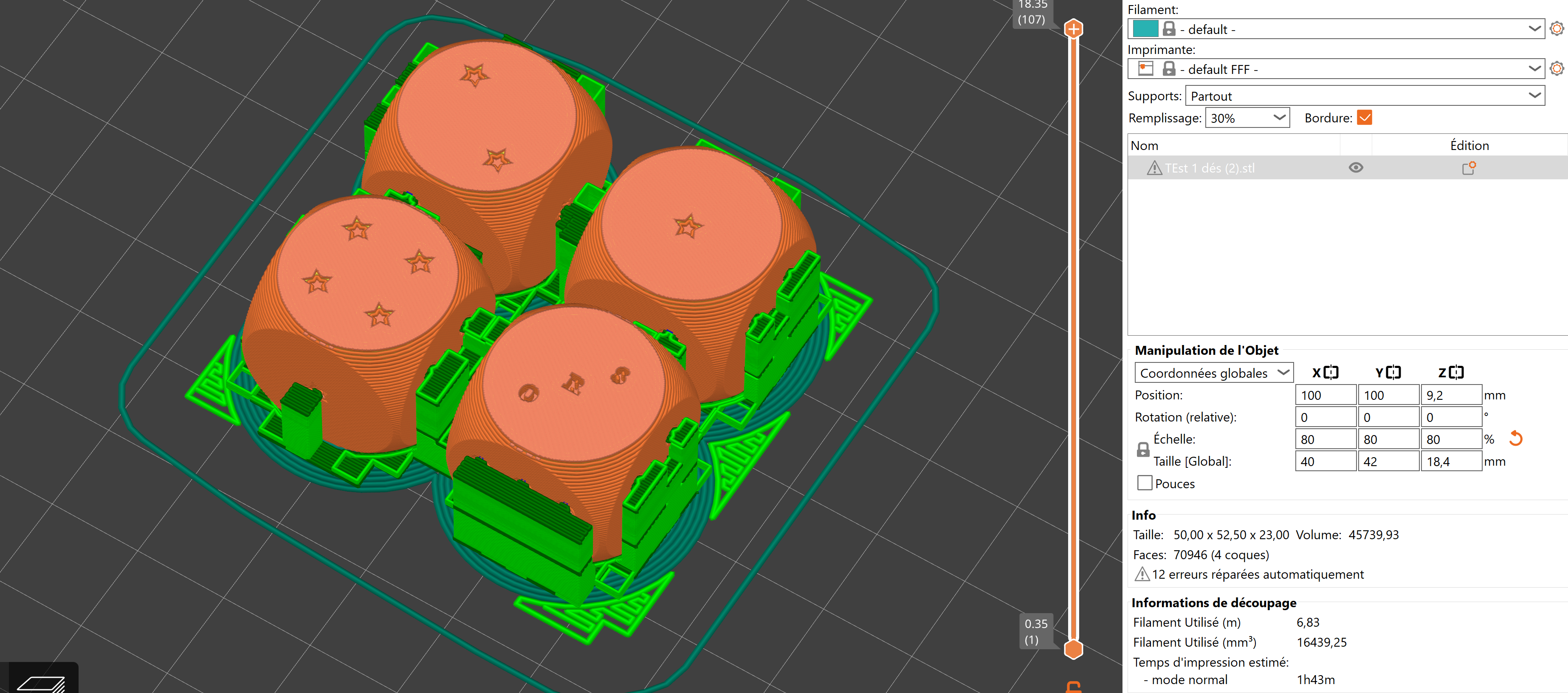
Le paramétrage de l'impression des dés est réalisé sur le logiciel PrusaSlicer. Un remplissage de 30 % a été sélectionné, offrant un bon équilibre entre poids et solidité pour assurer une bonne durabilité. Des supports ont été ajoutés partout pour garantir l'impression correcte des zones en surplomb, bien que cela complique leur retrait après l'impression. Une bordure a également été activée afin d'améliorer l'adhérence au plateau et d'éviter tout décollement en cours d'impression. Enfin, l'échelle des dés a été ajustée à 80 % pour adapter leur taille tout en conservant leurs détails.