PROJET ROB3 (Mattéo, Mathis, Manu, Victor, Maxence, Athar, Maxime) .
Schwarze
13/02/2025
Activités du jour :
- Répartitions des rôles
- Découverte des différents pièces
- Commencement du Diagramme de Grantt
- Commencement du Planning
Répartition des rôles :
- Responsable informatique : Maxence
-
Pôles informatique : Maxence, Manu, Mathis
-
Responsable électronique: Mattéo
- Pôle électronique : Matthéo, Victor
-
Responsable mécanique : Maxime
- Pôle mécanique : Maxime, Athar
-
Chef de projet : Victor
- Responsable batterie :Athar
- Responsable moteur : Matthéo
- Responsable Planning : Mathis
Pôles informatique :
- Stratégies pour réaliser l'objectif : (position des capteurs pour localiser les différents obstacles/objets)
- Test du capteur ultrason avec la carte arduino
- Modification du programme arduino pour avoir une meilleur précision de la distance
- Test des moteurs CC (un puis deux)
- Test du servomoteur
Pôle électronique :
- brider les moteurs
Pôle mécanique :
- Imagination du Robot :
Tout d'abord il faut prendre en compte le cahier des charge et concevoir plusieurs schémas de robots et choisir une des propositions.
- Conception de la pince :
Ensuite on conçoit la pièce central du Robot. On a imaginer une pièce cubique facilitant le passage des files et renforçant la structure.
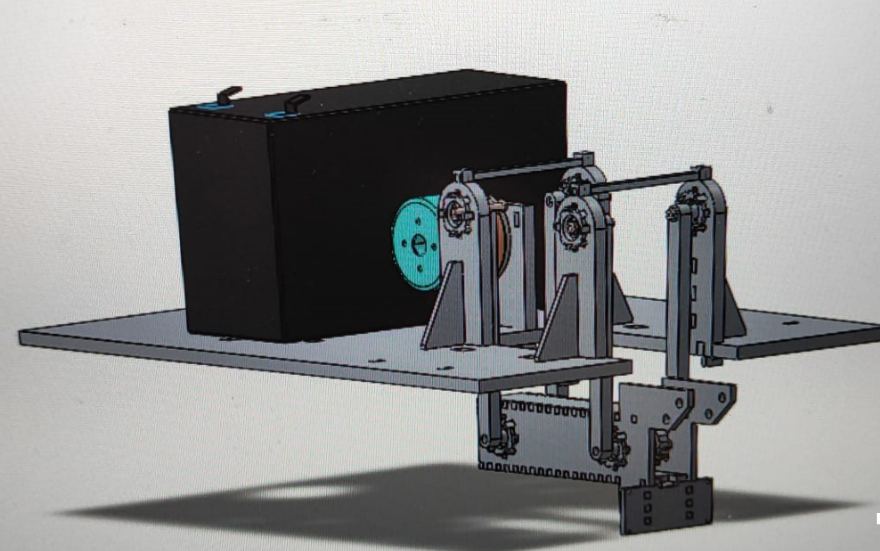
- Conception des bras et pilier :
On a conçut le système avec roulements qui connecte le bras et une autre pièce, ce système est le même au deux extrémité de celui-ci (la pince et le pilier).
On a conçut 4 piliers leur bras pour que la pince est un mouvements stable.
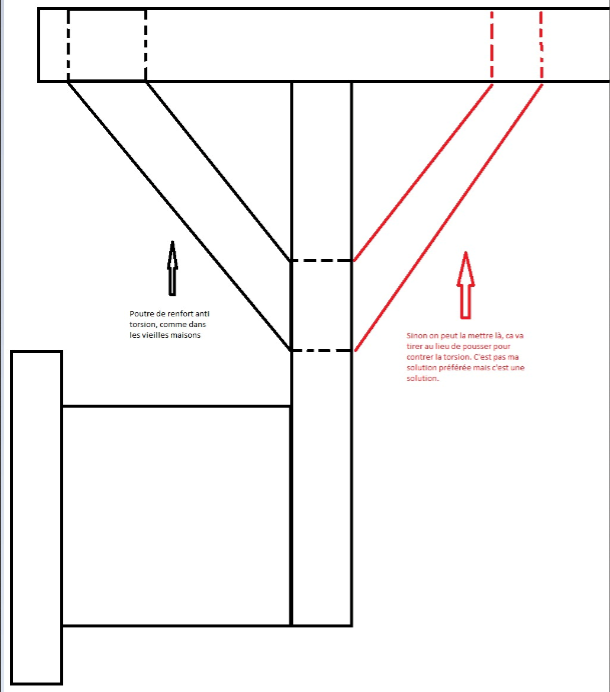
On a rajouter des renforts en haut et en bas des piliers.
- Ajout des Roues :
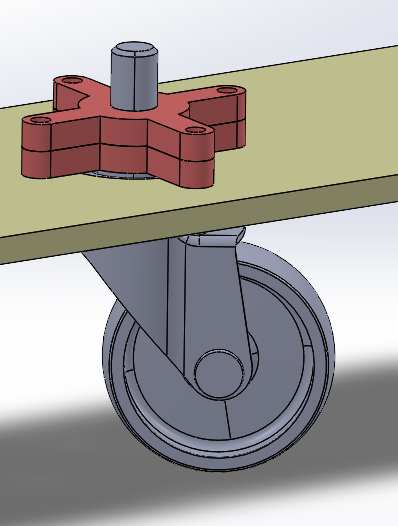
On a d'abord ajouté les roues avec leur moteur a l'avant au milieu des piliers puis on a rajouté la roue folle a l'arrière. Il a fallu faire attention à la différence de hauteur entre les différentes roues pour que le plateau reste parallèle au sol et au passage des files.
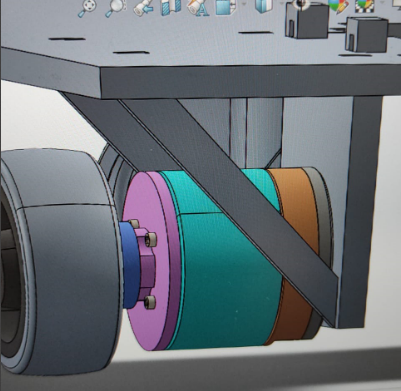
Notre première idée de renfort ne marchais pas car la partie cyan tourne, Il y aurais trop de frottement.

Donc nous avons imaginé un système de renfort plus classique

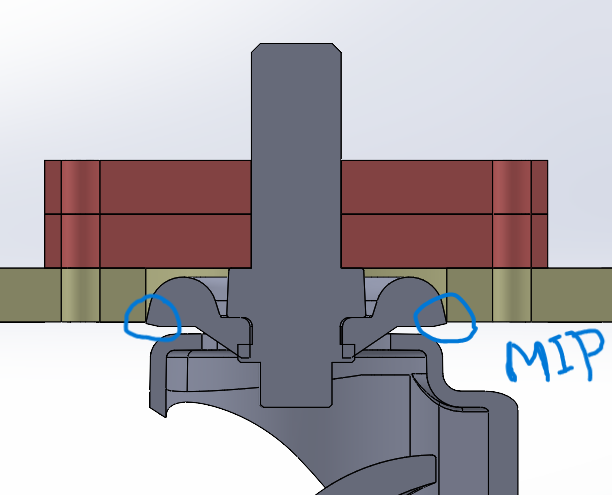
Pour la roue folle on a choisis de faire la mipe
- Ajout du moteur pour le bras :
On a choisi déporté le moteur, on ne la pas mit à la place d'un pilier. On a utiliser un système d'engrenage et le même system de support que celui des roues.

- Ajout de la batterie et de la carte Arduino :
- Optimisations :
Objectif avant la prochaine séance
- Finir le diagramme de Grantt
- Finir le programme