PROJET ROB3 (Mattéo, Mathis, Manu, Victor, Maxence, Athar, Maxime) .
Schwarze
13/02/2025
Activités du jour :
- Répartitions des rôles
- Découverte des différents pièces
- Commencement du Diagramme de Grantt
- Commencement du Planning
Répartition des rôles :
- Responsable informatique : Maxence
-
Pôles informatique : Maxence, Manu, Mathis
-
Responsable électronique: Mattéo
- Pôle électronique : Matthéo, Victor
-
Responsable mécanique : Maxime
- Pôle mécanique : Maxime, Athar
-
Chef de projet : Victor
- Responsable batterie :Athar
- Responsable moteur : Matthéo
- Responsable Planning : Mathis
Pôles informatique :
- Stratégies pour réaliser l'objectif : (position des capteurs pour localiser les différents obstacles/objets)
- Test du capteur ultrason avec la carte arduino
- Modification du programme arduino pour avoir une meilleur précision de la distance
- Test des moteurs CC (un puis deux)
- Test du servomoteur
Pôle électronique :
briderdetermination du cablage pour les moteurs
Les moteurs on besoin d'être alimenté en 12V DC de plus ils comuniquents via le bus CAN(les bornes H et L sur le shield ), la carte arduino peut-être alimentée directement en 12V via la prise jack
- Determination du cablage des capteur et actioneurs
Il a fallut ce mettre d'accord sur le pining des entrée et sorties ce shéma a été décidé : 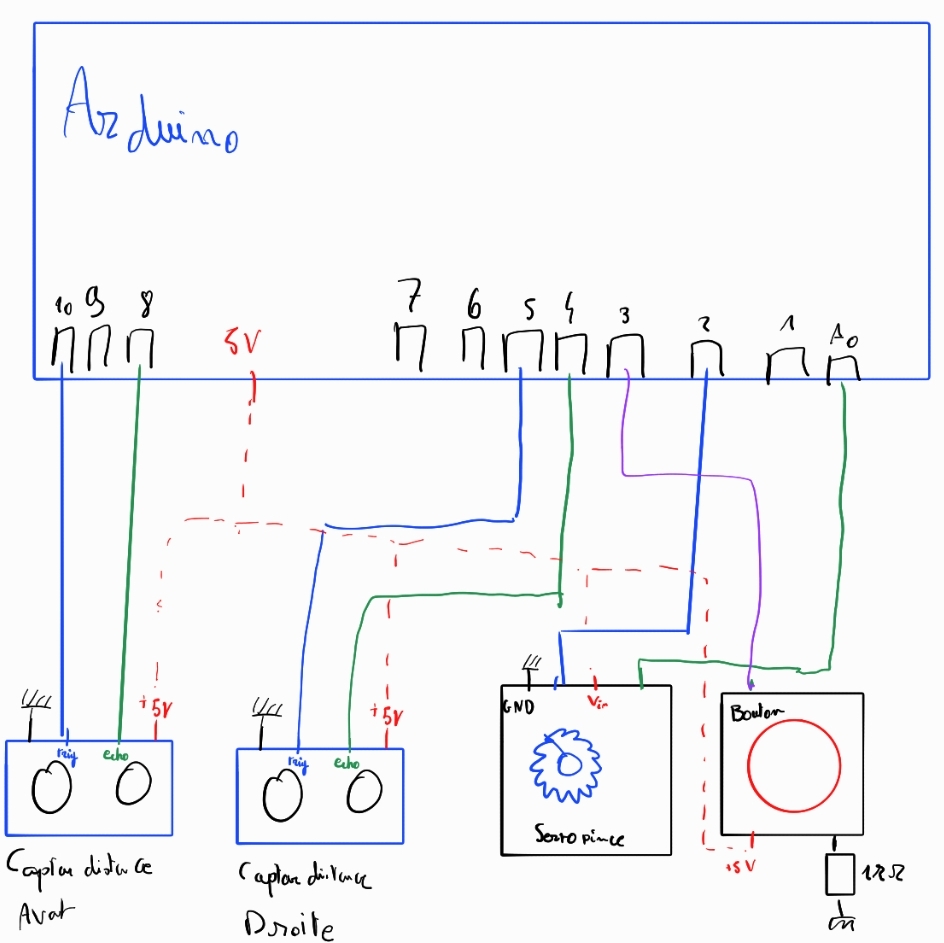
Le plus compliqué a été de gerrer le 5V commun. Pour ce faire nous avons utilisé des wago personels.
Des soudures on été faites pour reliers certain cables et les agrandirs. Nous avons optez pour un montage sans labdec car nous n'en avion pas d'assez petite.
Pôle mécanique :
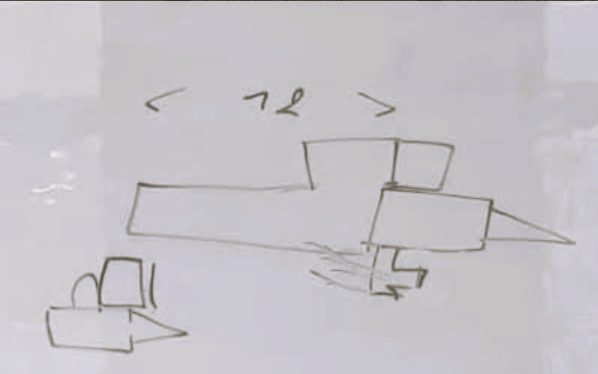
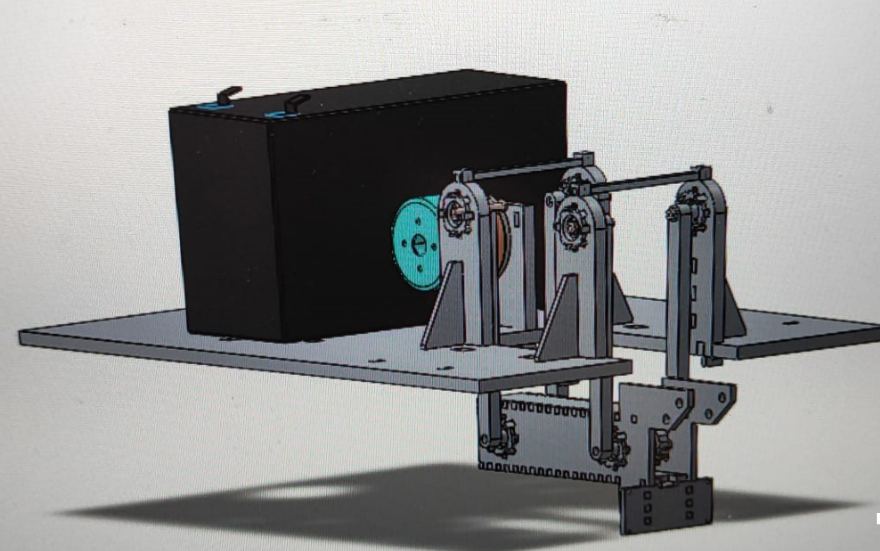
- Imagination du Robot :
Tout d'abord il faut prendre en compte le cahier des charge et concevoir plusieurs schémas de robots et choisir une des propositions.

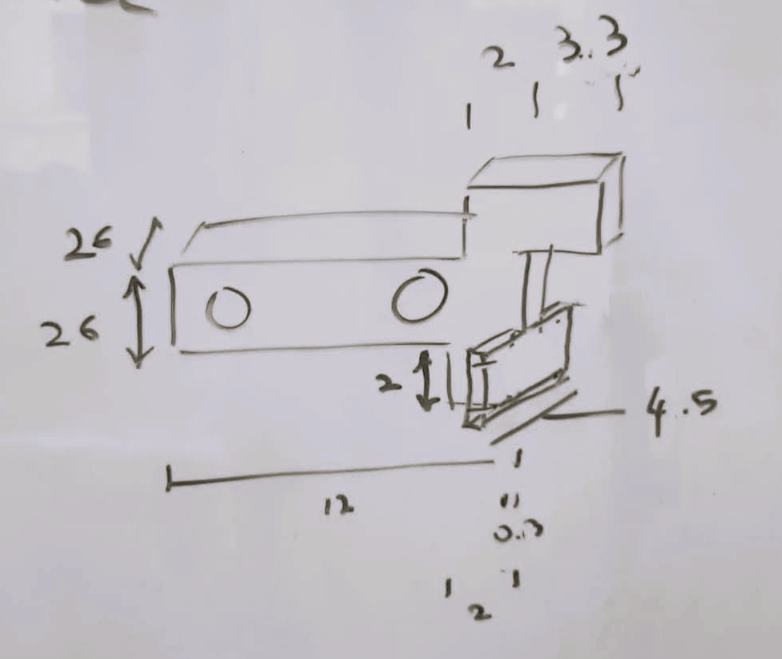
- Conception de la pince :
Ensuite on conçoit la pièce central du Robot. On a imaginer une pièce cubique facilitant le passage des files et renforçant la structure. Cette pièce est équipé de la pince plastique et d'un capteur.
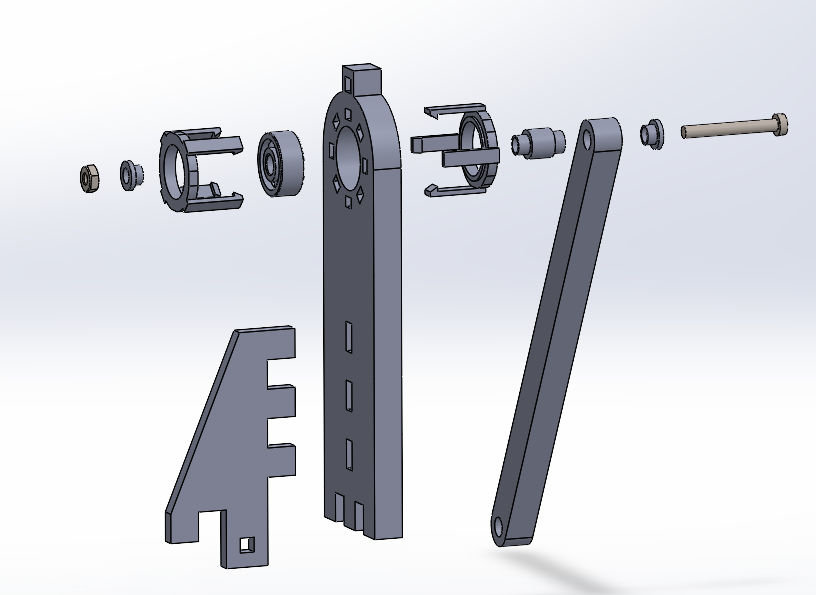
- Conception des bras et pilier :
On a conçut le système avec roulements qui connecte le bras et une autre pièce, ce système est le même au deux extrémité de celui-ci (la pince et le pilier).
On a conçut 4 piliers leur bras pour que la pince est un mouvements stable.
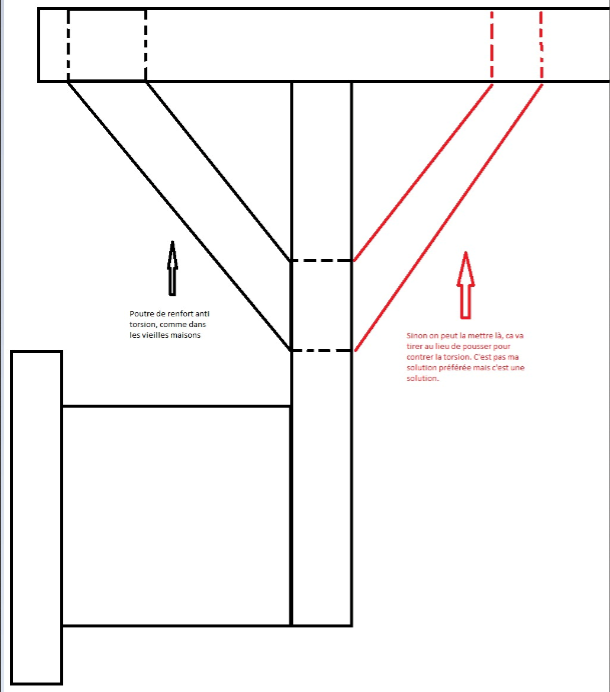
On a rajouter des renforts en haut et en bas des piliers.
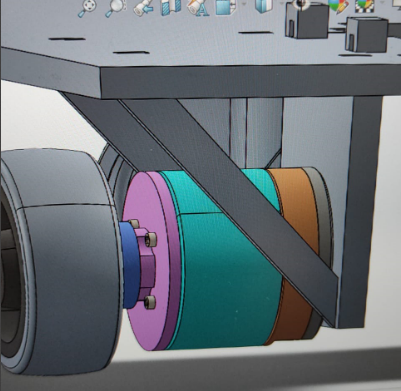
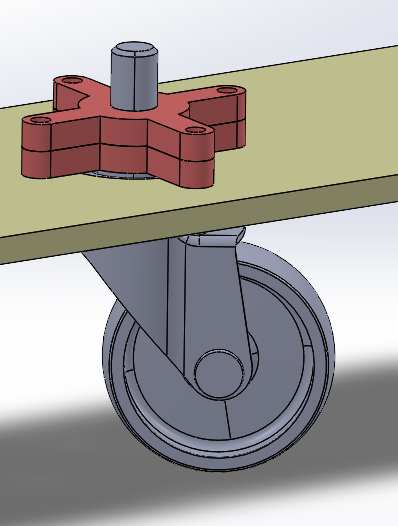
- Ajout des Roues :
On a d'abord ajouté les roues avec leur moteur a l'avant au milieu des piliers puis on a rajouté la roue folle a l'arrière. Il a fallu faire attention à la différence de hauteur entre les différentes roues pour que le plateau reste parallèle au sol et au passage des files.
Notre première idée de renfort ne marchais pas car la partie cyan tourne, Il y aurais trop de frottement.

Donc nous avons imaginé un système de renfort plus classique

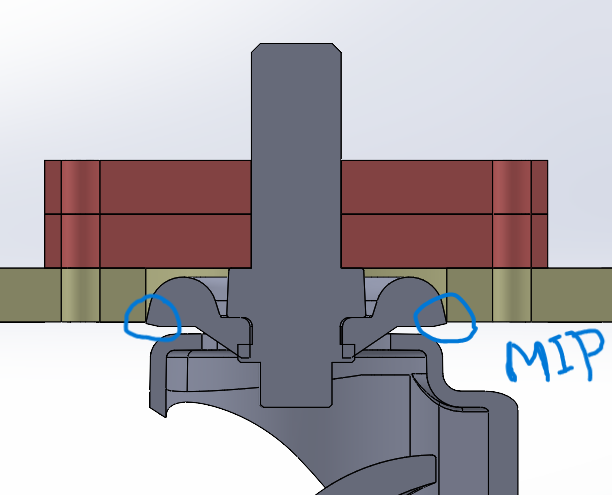
Pour la roue folle on a choisis de faire la MIP
- Ajout du moteur pour le bras :
On a choisi déporté le moteur, on ne la pas mit à la place d'un pilier. On a utiliser un système d'engrenage et le même system de support que celui des roues.

- Ajout de la batterie et de la carte Arduino :
- Optimisations :
Activité 06/03/2025
Pôle informatique :
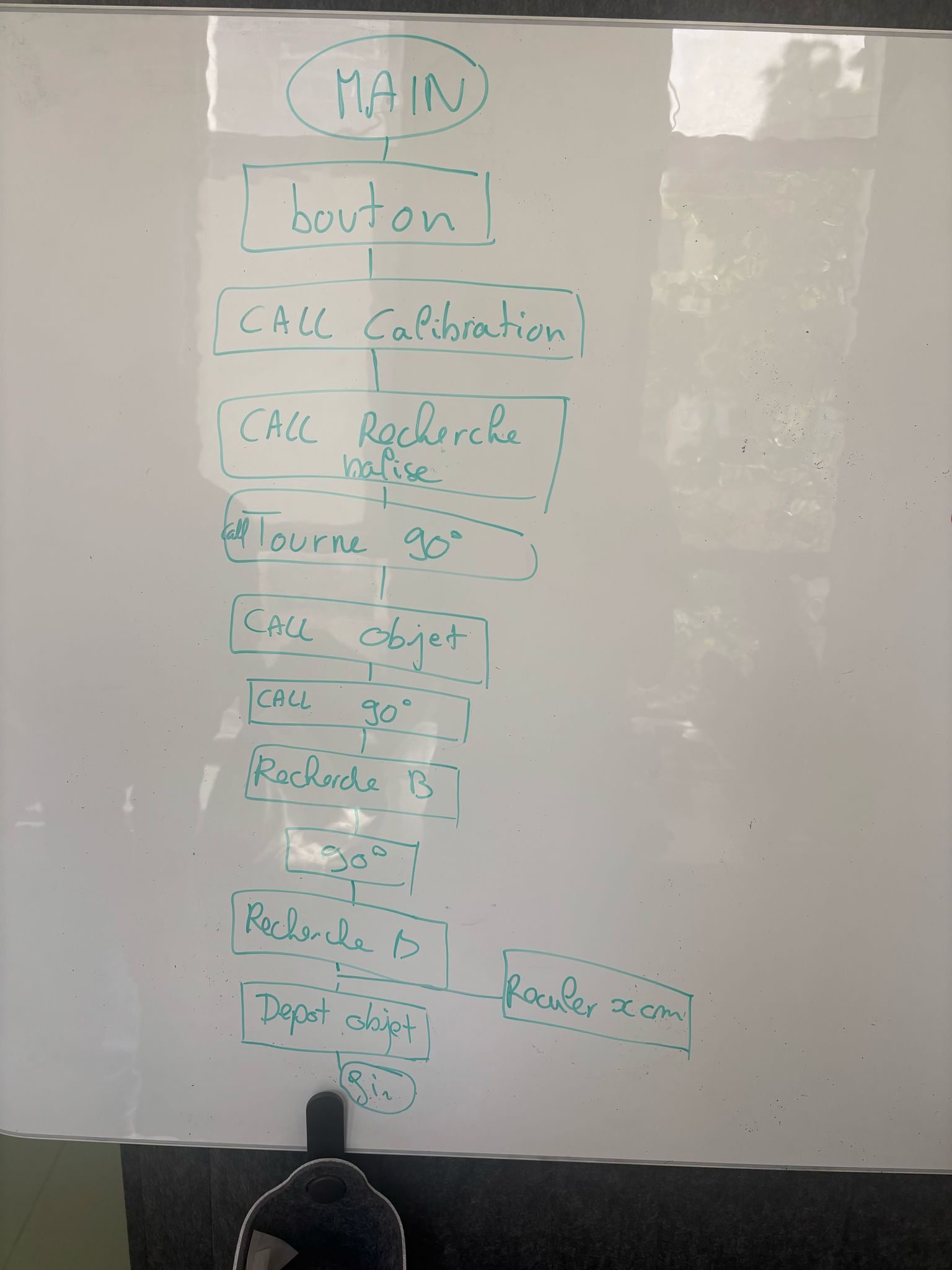
- création d’une fonction bouton_poussoir avec led
Pôle électronique :
Pôle mécanique :
Activité 13/03/2025
Pôle informatique :
Pôle électronique :
Pôle mécanique :
Activité 20/03/2025
Pôle informatique :
Pôle électronique :
Pôle mécanique :
Pôle mécanique :
Activité 15/05/2025
Pôles informatique :
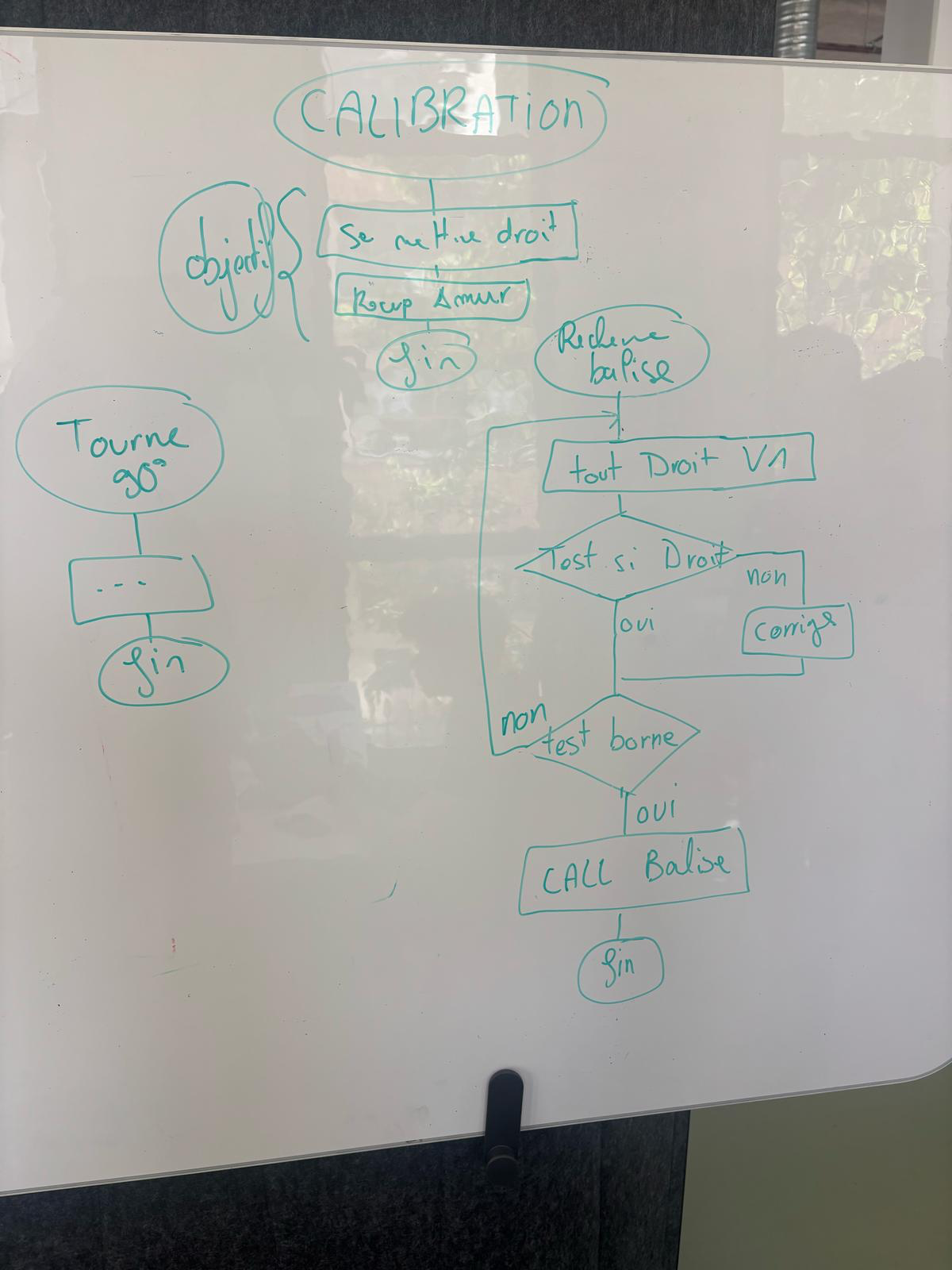
- Organigramme du programme principal
- Organigramme des sous programme
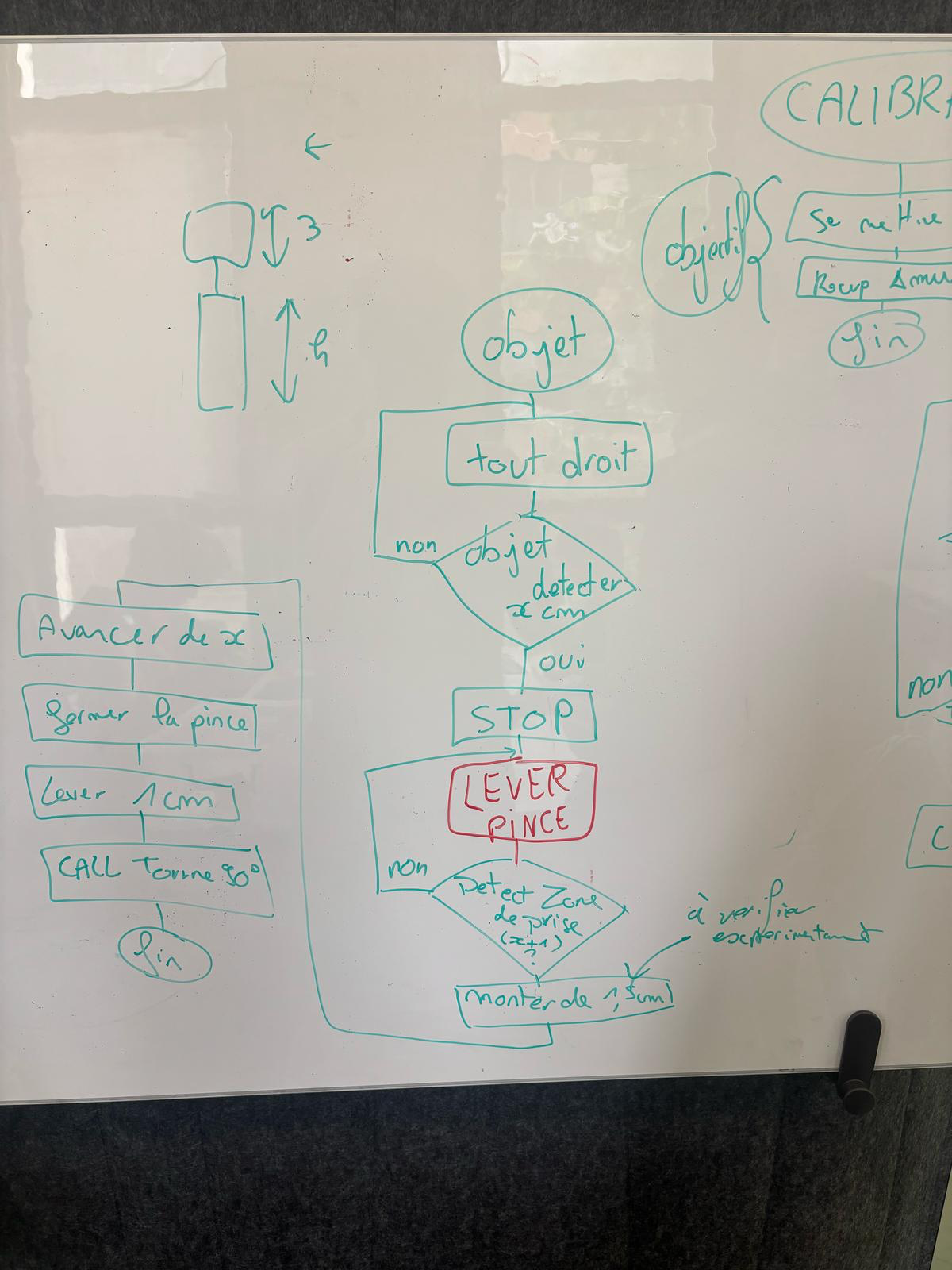
- Répartition des fonctions à réaliser:
- Tourner à 90° // Mathis
- Ouverture et fermeture de la pince // Fait par Manu
- Recherche Balise // Maxence
- Odometrie // Mathis
- Calibration // Manu
- Objet // Maxence
- Compensation mouvement bras // Mathis


Pôle électronique :
- Relier tous les câbles des servo moteurs + les deux capteurs aux VCC et GND
- Relier les câbles de data au pins que voulais le pôle informatique
Pôle mécanique :
Activité 22/05/2025
Pôle informatique :
- Test de fonctionnement des trois moteurs ( le robot peut avancer et lever son bras )
- Recherche de la valeur du couple nécessaire au moteur pour lever le bras tout en haut
- Continuation des fonctions odometrie, tourner à 90°, avancer, ect.. pour les modifier suite à leur non fonctionnement
Pôle électronique :
- mise en place des branchements
Pôle mécanique :
- essais d’améliorer le lever de bras avec un élastique pour soulager le moteur, puis finalement le moteur a un couple suffisamment pour maintenir le bras lever
Activité 04/06/2025
Pôle informatique :
- mise en commun des différents code réalisés par chacun des membres du pôle informatique
- test des fonctions
- après plusieurs essais, et de mesure, amélioration de la fonction pour avance
- fonction odometrie n’a pas l’air de fonctionner correctement et elle est utilisée pour tourner à 90° donc création d’une fonction plus expérimentale ou on va faire tourner le robot à une certaine vitesse pendant un certain temps pour obtenir 90°.
- test de la fonction qui permet de lire
Pôle électronique :
- amélioration des branchements
- mise en place du bouton sur le robot
- recharge de la batterie ainsi que test du fonctionnement avec uniquement la batterie
Pôle mécanique :
- amélioration et conception de nouvelles pièces pour un meilleur maintien de la batterie
Activité 05/06/2025
Pôle informatique :
Pôle électronique :
Pôle mécanique :