Groupe 4 : Baptiste, Nolann, Lounis, Harshanaa, Louisa, Lilian
Projet ROB3 2025-2026
INFORMATIONS
- Chef de projet : Louisa
- Responsable du Wiki : Baptiste
- Responsable informatique : Lilian
- Responsable mécanique : Nolann
- Responsable électronique : Harshanaa
- Joker : Lounis
Contexte :
Créer un robot capable de se déplacer dans un périmètre défini afin d’attraper un objet à l’aide d’une pince et de le déposer à une autre position.
Cahier des charges :
Le robot devra :
-
Se déplacer dans une zone limitée
-
Détecter un objet
-
S’en approcher
-
L’attraper avec une pince
-
Se rendre à une position cible
-
Déposer l’objet
Liste des matériaux
-
2 moteurs KTECH
-
1 moteur dynamique
-
1 pince 3551
-
2 capteurs à ultrasons
-
1 câble USB pour télécharger les programmes Arduino
-
1 convertisseur UART-USB pour communiquer avec le PC
-
1 carte Arduino Mega avec 2 shields enfichés
1er séance (19/02/2026) :
II) Discussion des méthodes (mécanique)
On a dans un premier temps établi les objectifs nécessaire pour réaliser le robot.
On a ensuite discuté et réfléchi sur la schématisation d'un premier modèle.
III) Vérifications des composants électronique et programme
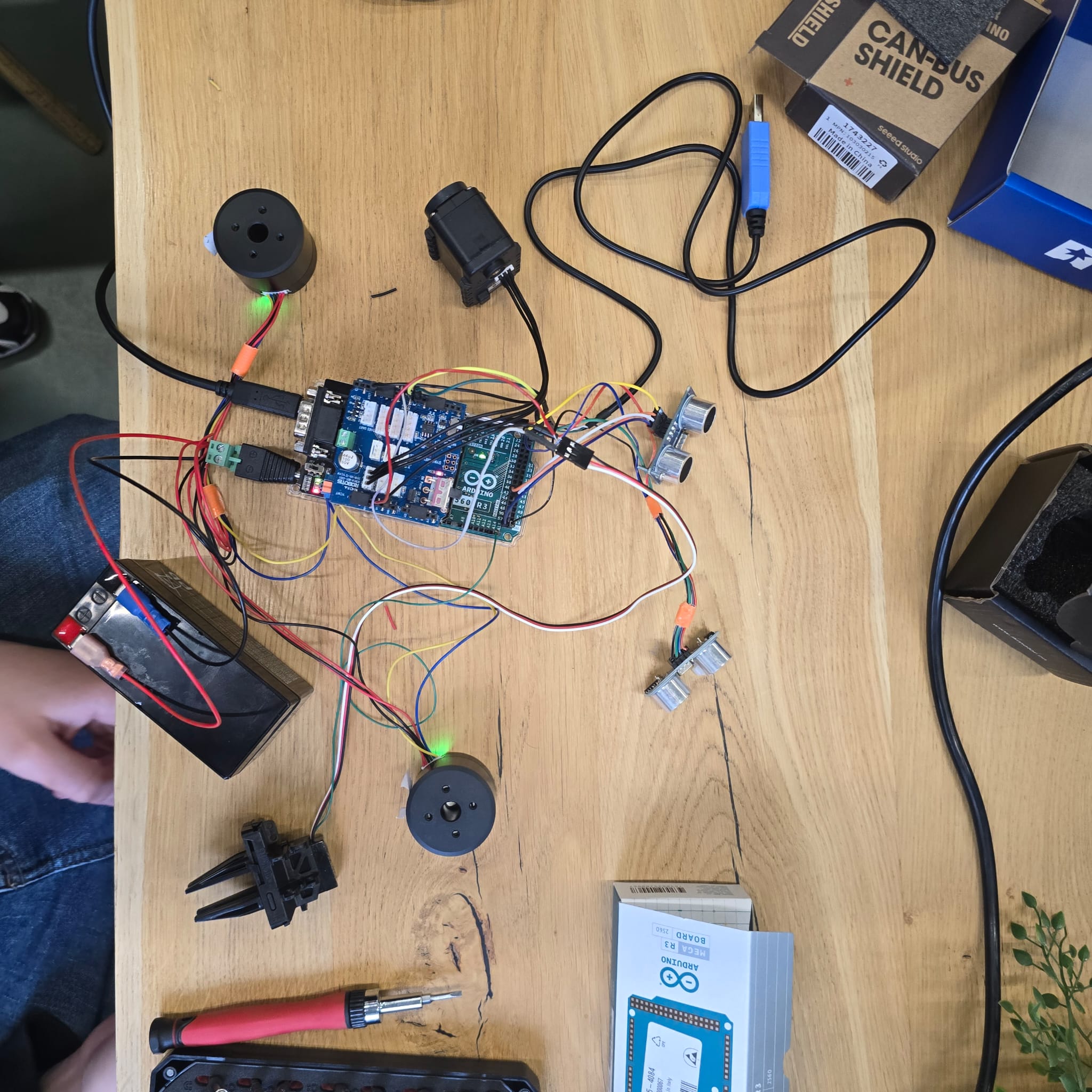
En parallèle de la discussion sur notre modèle, on a commencé par vérifier avec Arduino le bon fonctionnement de tous les capteurs et des moteurs utilisés dans le projet, pour ce faire on a utilisé un programme test.
Description du programme de test utilisé
Ce programme Arduino permet de contrôler un petit système robotique composé de deux moteurs KTECH (pour le déplacement), d’un moteur Dynamixel (pour faire bouger un bras), d’un servo moteur qui commande une pince (gripper) et de deux capteurs à ultrasons qui détectent les obstacles.
Au démarrage, le programme initialise les communications avec les moteurs et prépare les capteurs. Ensuite, dans la boucle principale, le robot mesure en permanence la distance des obstacles grâce aux capteurs à ultrasons.
Le fonctionnement du robot alterne toutes les deux secondes, dans un cycle total de quatre secondes :
-
Pendant les deux premières secondes, les deux moteurs KTECH tournent vers l’avant et la pince s’ouvre.
-
Pendant les deux secondes suivantes, les moteurs tournent en arrière et la pince se ferme.
Les capteurs à ultrasons permettent d’arrêter les moteurs ou la pince : si un obstacle est détecté à moins de 8 cm, les moteurs s’arrêtent ou la pince cesse de fermer/s’ouvrir selon le capteur qui détecte l’obstacle (les deux capteurs ont des rôles différents).