Groupe 4 : Baptiste, Nolann, Lounis, Harshanaa, Louisa, Lilian
Projet ROB3 2025-2026
INFORMATIONS
- Chef de projet : Louisa
- Responsable du Wiki : Baptiste
Le programme est structuré en trois fonctions principales :
- Responsable informatique : Lilian
- Responsable mécanique : Nolann
- Responsable électronique : Harshanaa
- Joker : Lounis
Contexte :
Créer un robot capable de se déplacer dans un périmètre défini afin d’attraper un objet à l’aide d’une pince et de le déposer à une autre position. Voir Sujet du projet.
Liste du matériel
-
2 moteurs KTECH
-
1 moteur dynamique
-
1 pince 3551
-
2 capteurs à ultrasons
-
1 câble USB pour télécharger les programmes Arduino
-
1 convertisseur UART-USB pour communiquer avec le PC
-
1 carte Arduino Mega avec 2 shields enfichés
1ère séance (19/02/2026) :
I) Discussion des méthodes (mécanique)
On a dans un premier temps établi les objectifs nécessaires pour réaliser le robot.
On a ensuite discuté et réfléchi sur la schématisation d'un premier modèle.
Concernant les composants pratiques pour l’évolution et les interactions de notre robot dans l’espace, nous disposons de deux-roues que l’on peut motoriser à l’aide de deux moteurs, d’une roue folle, d’un troisième moteur, d’une pince et de deux capteurs à ultrasons.
Ces deux capteurs peuvent nous permettre à la fois de situer le robot dans l’arène en mesurant la distance qui le sépare des barrières et de calculer la distance qui sépare le robot du totem à déplacer.
Pour ce faire, nous avons trouvé judicieux de placer un capteur sur le côté droit de notre robot pour mesurer la distance entre lui et la barrière qui est à côté, et l’autre devant le robot pour mesurer la distance entre lui et le totem ou la barrière en face, selon la situation.
Pour avoir une idée de la forme de notre châssis, nous nous sommes d’abord intéressés à la fixation des deux-roues mobiles et de leurs moteurs propres.
Les moteurs ont pratiquement le même diamètre que les roues et nous avons estimé qu’il serait compliqué de les fixer sur le châssis sans que ce dernier ne touche le sol. Nous avons donc opté pour un châssis qui se situerait au-dessus des moteurs et des roues (ceux-ci fixés en dessous) et qui porterait la batterie et les autres composants électroniques.
Cela implique d’avoir un châssis avec une hauteur d’environ 7 cm par rapport au sol, ce qui est déjà un peu plus haut que la partie du totem utile à la prise. Nous avons donc cherché une solution qui permettrait de positionner la pince du robot plus bas que le châssis, le capteur à ultrasons lui-même plus bas que la pince (avec la pince juste au dessus du capteur) , car celle-ci va monter et redescendre, et le troisième moteur derrière cette même pince pour la lever ou la descendre (en rotation) une fois qu’elle a pris le totem.
Dans cette configuration, il n’y avait pas de place pour fixer la roue folle à l’avant du châssis donc nous avons décidé de la fixer à l’arrière.
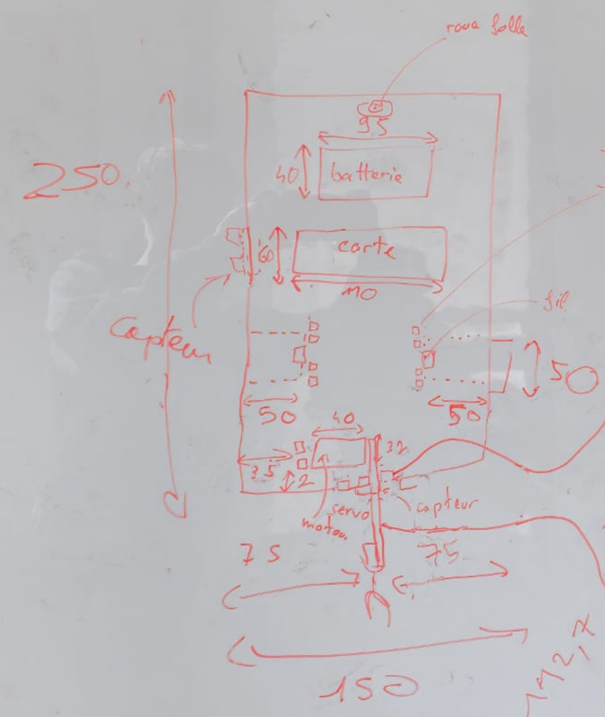
Puisqu’un dessin vaut mieux que 1000 mots, voici la première représentation de notre robot :
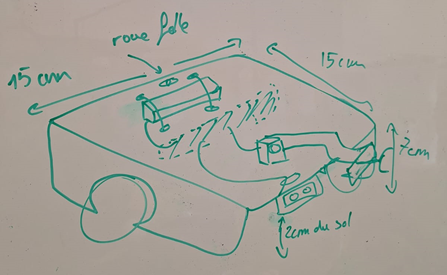
Pour l’instant, nous avons imaginé le châssis et les pièces liant le troisième moteur et la pince construits avec des planches de médium que l’on peut découper au laser.
II) Vérifications des composants électroniques et programme
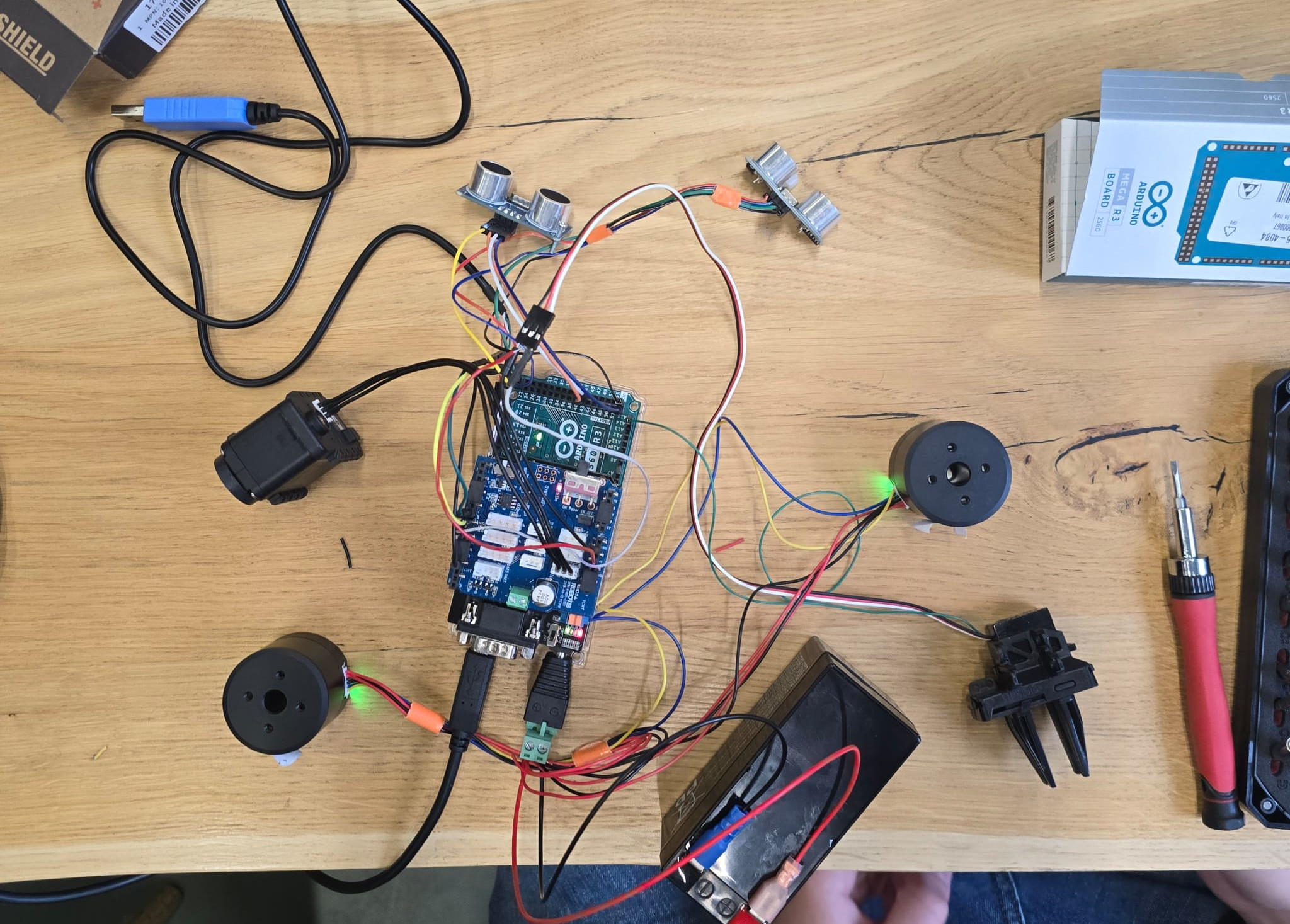
En parallèle de la discussion sur notre modèle, on a commencé par vérifier avec Arduino le bon fonctionnement de tous les capteurs et des moteurs utilisés dans le projet, pour ce faire on a utilisé un programme test.
Description du programme de test utilisé
Ce programme Arduino permet de contrôler un petit système robotique composé de deux moteurs KTECH (pour le déplacement), d’un moteur Dynamixel, d’un servo moteur qui commande une pince et de deux capteurs à ultrasons qui renvoient la distance qui les sépare d'un potentiel obstacle.
Au démarrage, le programme initialise les communications avec les moteurs et prépare les capteurs. Ensuite, dans la boucle principale, le robot mesure en permanence la distance des obstacles grâce aux capteurs à ultrasons.
Le fonctionnement du robot alterne toutes les deux secondes, dans un cycle total de quatre secondes :
-
Pendant les deux premières secondes, les deux moteurs KTECH tournent vers l’avant et la pince s’ouvre.
-
Pendant les deux secondes suivantes, les moteurs tournent en arrière et la pince se ferme.
Les capteurs à ultrasons permettent d’arrêter les moteurs ou la pince : si un obstacle est détecté à moins de 8 cm, les moteurs s’arrêtent ou la pince cesse de fermer/s’ouvrir selon le capteur qui détecte l’obstacle (les deux capteurs ont des rôles différents).
Objectif de ce test :
Vérifier l'intégrité du matériel : S'assurer qu'aucun composant (cartes Arduino, shields, moteurs, capteurs, pince) n'est défectueux.
Valider le câblage : Tester que toutes les connexions électriques (bus CAN, alimentation 12V et 5V, signaux des capteurs, UART) sont correctes et sécurisées.
Configurer l'environnement de développement : Installer correctement l'IDE Arduino, les bibliothèques spécifiques.
Comprendre l'architecture de communication : Le programme utilise la voie de communication UART-USB (via le convertisseur) plutôt que le câble USB standard de l'Arduino, car le shield Dynamixel parasite cette dernière. Cela permet d'apprendre à dialoguer avec la carte en mode autonome.
Se familiariser avec la programmation : Le code fourni sert de base de travail et d'exemple.
Observer le comportement attendu : Le programme example.ino a une logique simple (ouverture/fermeture de la pince, rotation des moteurs, réaction aux obstacles).
Si le robot suit ce comportement, alors on peut dire que :
- Les moteurs KTECH reçoivent bien les commandes de vitesse via le CAN.
- Le moteur Dynamixel reçoit bien ses commandes de position.
- Les capteurs à ultrasons renvoient bien une information.
- La pince est correctement alimentée et commandée.
2ème séance (05/03/2026) :
I) Organisation de la séance
Entre-temps, Louisa a créé un espace de travail commun sur ClickUp afin que l’on puisse mieux s’organiser grâce à la création d’un Gantt et regrouper toutes les informations importantes.
Durant cette deuxième séance, nous nous sommes réparti le travail de cette manière :
· Partie mécanique : détermination du modèle des dimensions précises de chaque pièce composant le châssis
- Baptiste
- Nolann
- Lounis
· Electronique/informatique
- Louisa
- Harshanaa
- Lilian
II) Partie mécanique : Schéma et dimensions précises du châssis
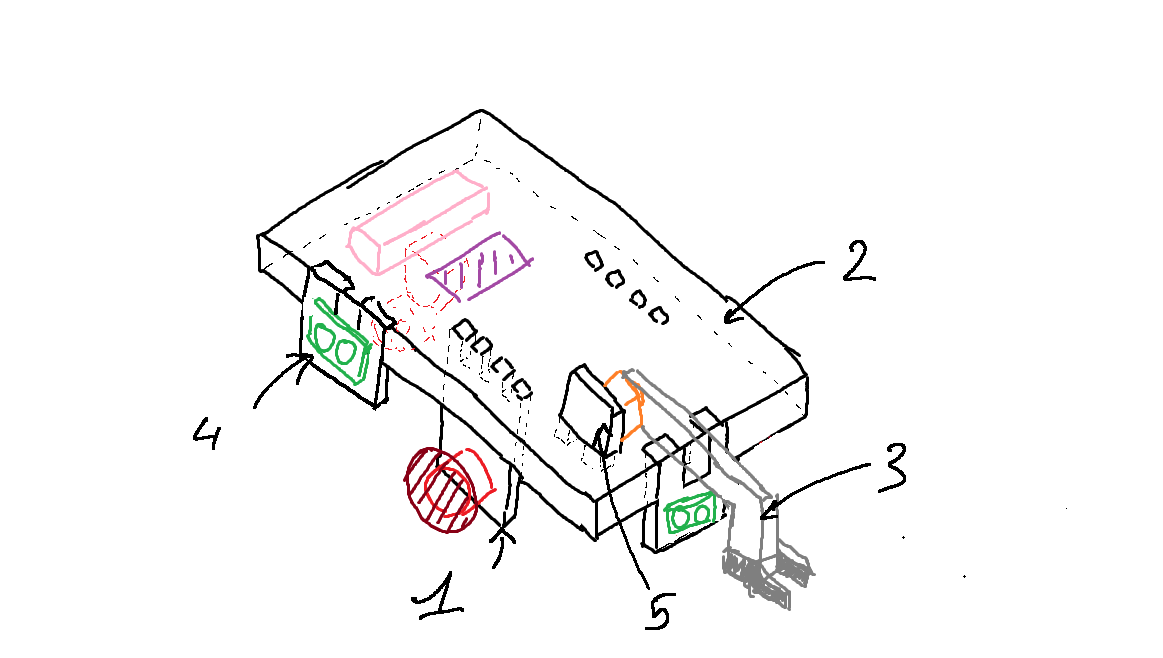
Schéma du prototype du robot
Pour déterminer toutes les dimensions nécessaires à la conception de notre châssis, nous nous sommes basés sur les dimensions renseignées sur les fiches techniques des composants à notre disposition. Nous avons trouvé ses fiches techniques sur Internet et le wiki.
Support des moteurs des roues (n°1)
Tout d’abord, nous nous sommes rendu compte que les pièces que nous avions imaginé pour soutenir les moteurs des roues, allaient soutenir en réalité la partie du moteur qui tourne. C’est très dérangeant car cela aurait entraîné des frottements et gêné la rotation des roues. Nous avons donc décidé de les supprimer. Les moteurs seront donc seulement fixés sur une pièce en bois à l’aide de 4 vis. Voilà une représentation de cette pièce :
Cette pièce sera fixée sous la base du châssis à l’aide de créneaux et de colle si besoin. (Le bas de la pièce est à 10mm du sol)
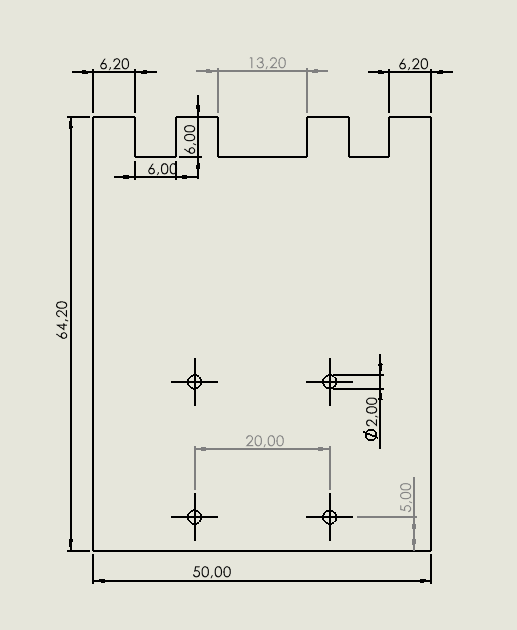
Dimensionnement de la base (n°2)
Ensuite, il a fallu décider de la disposition des différents composants tels que la batterie, la carte Arduino, le moteur restant et les capteurs pour dimensionner la base du châssis.
On choisit finalement les dimensions représentées sur ce schéma :
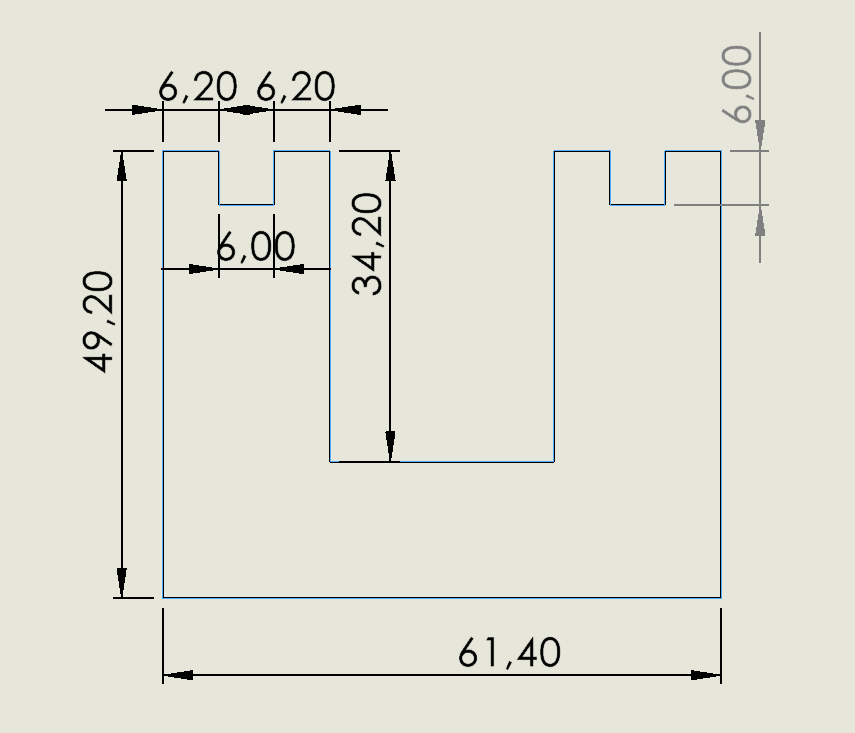
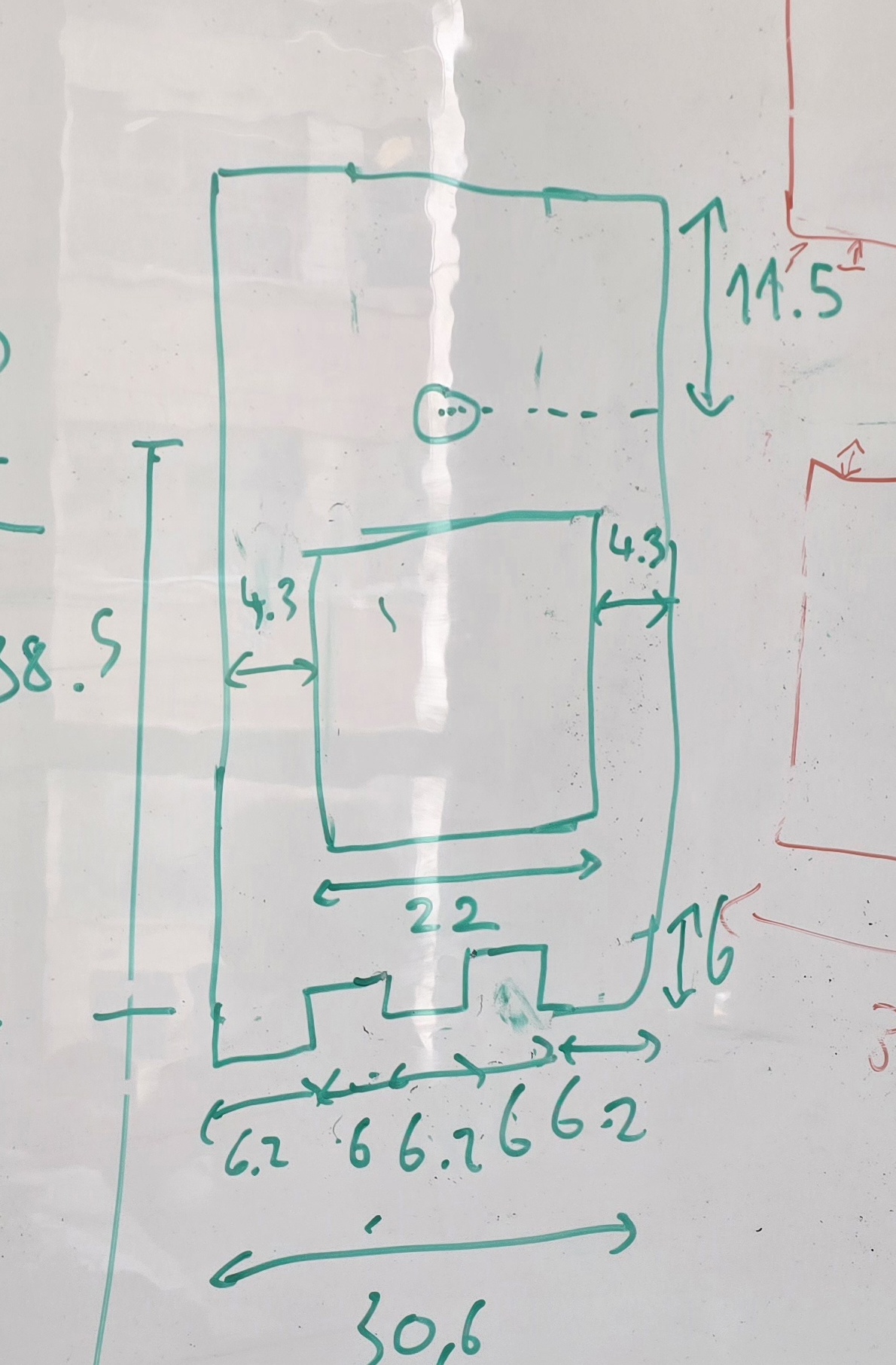
Fixation de la pince (n°3)
Nous avons ensuite dimensionné les pièces qui relient le moteur à la pince :
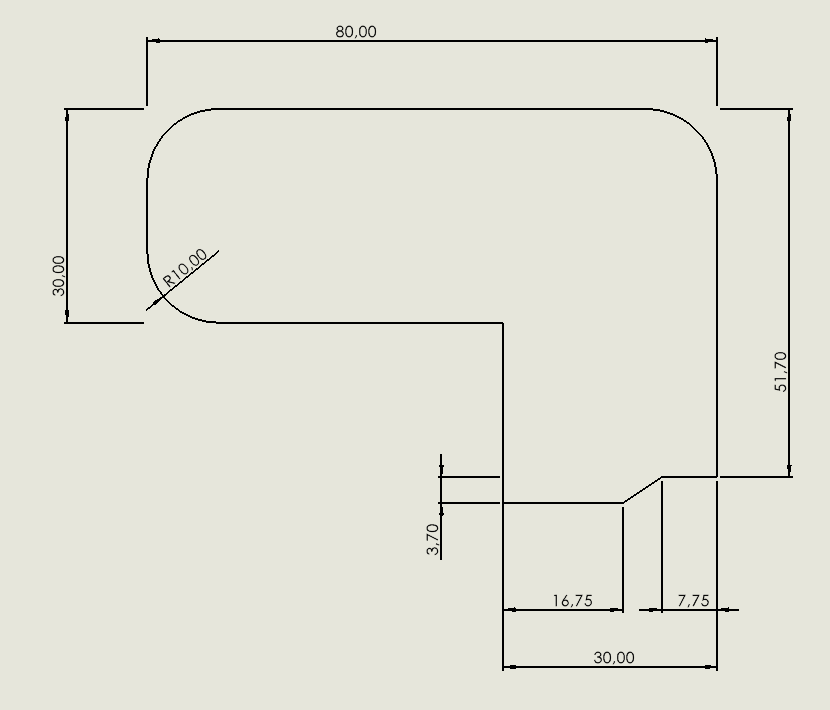
Il s’agit de deux pièces en bois que l’on fixerait ensemble soit en les vissant, soit en les collant.
Leur épaisseur n’est pas précisée sur ce schéma mais elle est de 6 mm chacune afin que l’on ait une épaisseur d’au moins 1,2 cm afin d’y fixer la pince qui présente cet écartement à l’endroit prévu pour sa fixation.
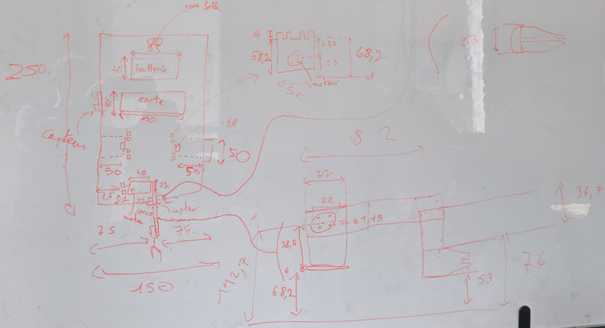
Finalement, lorsque l’on regroupe toutes les informations, on obtient ce schéma :
Dimensionnement des créneaux :
Pour dimensionner les créneaux nous avions dû avoir besoin de connaître la dimension des créneaux et des trous pour que ces derniers puissent former une liaison encastrement. Grâce aux tests effectués par le groupe de Valentine, nous avions conclu qu'une largeur de 0.2 mm plus grande que le trou était nécessaire pour avoir une liaison encastrement qui ne bouge pas.
Nous avions donc fait des créneaux de 6.2 mm de largeur espacés de 6 mm entre eux.
Dans le chassis, les trous (censés acceuillir les créneaux) font donc 6 mm de longueur et de largeur tandis que les pleins séparant les trous font 0.2 mm de plus de longueur.
Nous avons répété ce principe pour tous les créneaux.
III) Partie Electronique et Informatique
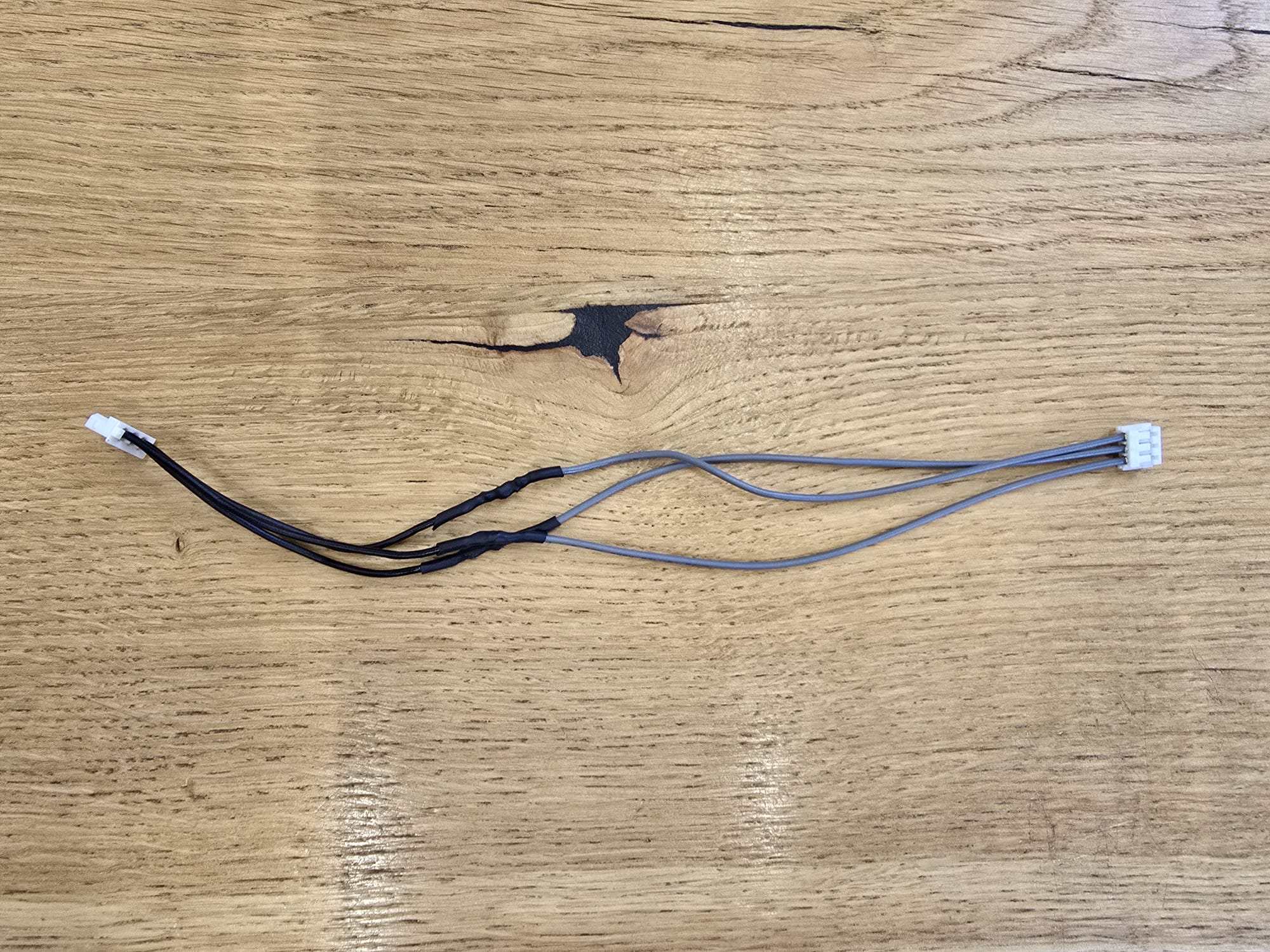
Lounis a également fabriqué le câble qui permet de brancher le servo-moteur à la carte Arduino grâce à du soudage. En effet, on a commencé avec deux câbles à 3 fils chacun qu'on cherche à souder entre eux pour faire un seul câble. On place d'abord les gaines thermorétractables sur la fin de chaque fil (pour un seul câble), ensuite on va chercher à souder les trois fils de chaque câble avec les 3 fils de l'autre câble de façon à ce que la face de l'embout en plastique d'un des câbles soit du côté métallique et que l'embout en plastique de l'autre câble soit du côté non métallique et que le fil de droite d'un câble corresponde au fil de droite de l'autre câble dans cette même position pour éviter une torsion des câbles lors du branchement. On les soude ensuite dans cette même position de façon à ce que les fils préalablement dénudés de cuivre ou autre métal conducteur s'entortillent autour du métal conducteur de l'autre fil (celui qu'on veut souder de sorte à respecter la position expliquée avant), puis on chauffe le métal à souder qu'on laisse couler à l'intérieur de l'entortillage des deux fils, de sorte à ce que lorsque le métal refroidit et que les fils de métal conducteur soient soudés entre eux. Puis une fois cette étape terminée pour tous les fils, on chauffe la gaine thermorétractable à l'endroit du soudage et on répète l'opération pour les 3 fils.
3ème séance (26/03/2026) :
I) Finalisation de la conception mécanique
a) Finalisation du dimensionnement
Supports des capteurs (n°4)
Pour le maintien des capteurs à une hauteur de 40mm du sol, nous avons décidé de réaliser 2 fois la même pièce pour le capteur du côté et celui de devant. Cette pièce étant accrochée au bord du châssis avec des encoches.
Support du moteur du support de pince (n°5)
Le moteur déplaçant la pince est fixé de manière similaire aux moteurs des roues. Sa pièce de support étant accrochée à la base par le dessus avec des encoches.
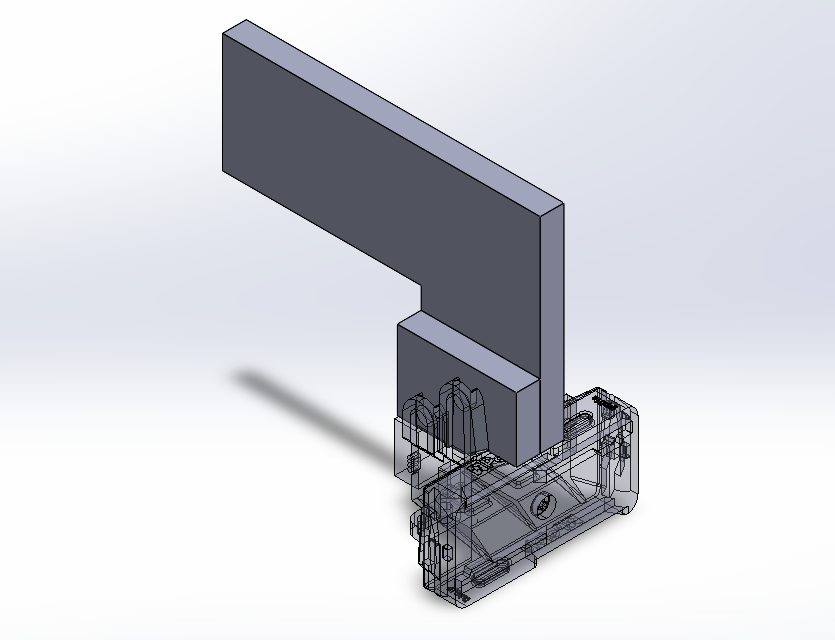
b) Modélisation CAO
À partir des schémas côtés, nous avons utiliser le logiciel SolidWorks pour modéliser toutes nos pièces en 3D. Cette étape est nécessaire pour passer à la création des fichiers pour la découpe laser.
II) Test des composants et de l'arène
Conditions expérimentales
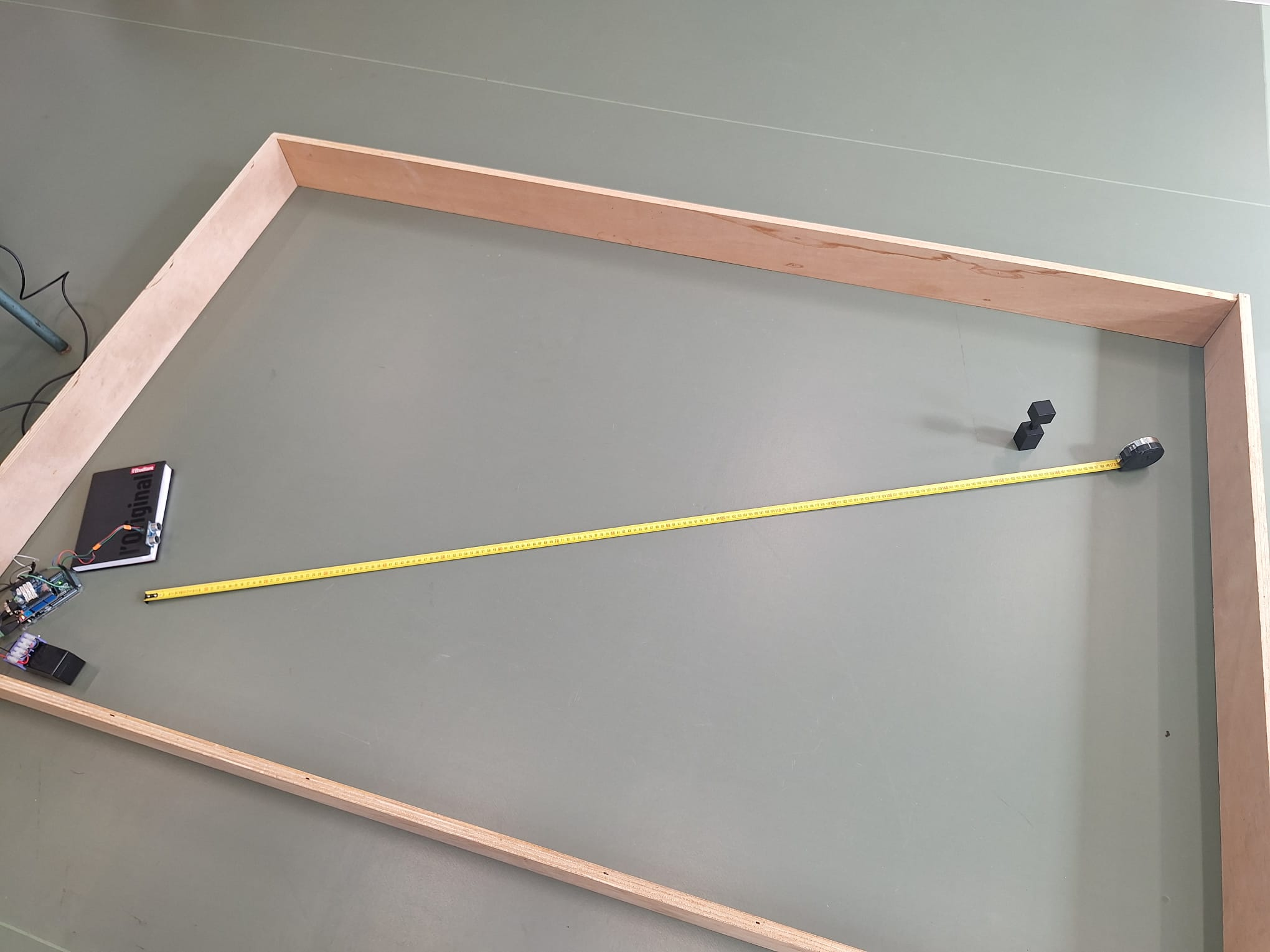
- Épaisseur du mètre à prendre en compte ≈ 6,5 cm
- Position du capteur
- 19,5 cm du bord en longueur
- 25,5 cm en largeur
- Position du totem
- 30 cm de largeur
- 13,2 cm de longueur
Résultats des tests
- Mur en bois
- Distance mesurée ≈ 176 à 180 cm
- Détection correcte
- Totem mal orienté
- Distance mesurée ≈ 179–180 cm
- Le capteur détecte le mur
- Totem bien orienté
- Distance mesurée ≈ 170 cm
- Détection correcte
- Totem avec plus d’écart
- Distance réelle ≈ 157 cm
- Distance mesurée ≈ 155 cm
- Bonne précision
Limites principales
- Angle de détection
- Mauvais alignement du totem → le signal rebondit mal
- Le capteur détecte le mur au lieu du totem
- Orientation du capteur
- Dépend du positionnement émetteur/récepteur
- Mauvaise orientation → mauvaise détection
Comportement général
- Peu sensible au bruit et aux mouvements environnants
- Erreurs possibles lors du déplacement du capteur ou en présence d’objets proches (ex : doigts)
- Re-stabilisation rapide après perturbation
- Précision limitée mais suffisante pour le projet
III) Développement informatique
a) logigramme et logique de programmation
Organisation générale
- Gestion des déplacements
- Gestion de la rotation
- Gestion du bras et de la pince
Ces fonctions sont coordonnées par une logique principale qui enchaîne les actions en fonction des objectifs et des données des capteurs.
Logique de fonctionnement
Déplacement
- Le robot avance à vitesse constante
- Deux modes possibles
- pendant une durée donnée
- jusqu’à atteindre une distance mesurée par le capteur
- Utilisation des capteurs pour ajuster la trajectoire si nécessaire
Rotation
- Le robot doit pouvoir effectuer une rotation de 90° à gauche ou à droite
- La rotation peut être réalisée
- soit par temporisation (moins précis)
- soit en utilisant les capteurs pour corriger l’angle
- Une correction peut être appliquée pour compenser les erreurs liées au sol ou aux moteurs
Manipulation (bras + pince)
- Séquence de prise
- fermer la pince
- lever le bras
- Séquence de dépôt
- baisser le bras
- ouvrir la pince
- Respect strict de l’ordre des actions
Logigramme
Début
→ Initialisation
→ Avancer
→ Vérifier distance (capteur)
→ Si condition atteinte
→ Arrêt
→ Avancer vers objectif
→ Action bras/pince
→ Fin ou boucle
b) squelette du programme
INITIALISATION
boucle principale :
avancer(vitesse)
si distance < seuil :
arreter()
tourner_90(direction)
si objectif atteint :
sequence_prendre()
si zone depot atteinte :
sequence_deposer()
fonction avancer(vitesse) :
activer moteurs
fonction arreter() :
stopper moteurs
fonction tourner_90(direction) :
lancer rotation
corriger avec capteurs si nécessaire
fonction sequence_prendre() :
fermer_pince()
lever_bras()
fonction sequence_deposer() :
baisser_bras()
ouvrir_pince()
IV) Bilan séance
Bilan
Cette troisième séance a permis de finaliser notre préparation théorique, avançant sur la partie mécanique avec la modélisation sur SolidWorks, la partie électronique avec les différents tests sur les capteurs et la partie sur la logique informatique du robot en établissant son logigramme et le squelette du programme Arduino. Cette séance nous permet donc d'aborder les premières étapes sur la phase de montage et les premiers essais pratiques.
Objectif prochaine séance
- Découpe des pièces du châssis
- Commencer montage mécanique
- Essais programme
No Comments