Rover Martien
Construction et programmation d'un modèle de rover martien dans le cadre de l'UE Atelier Fablab LU3SV062
Responsable : Nicolas Rividi
Étudiants : Raphaël Forasté et Alexandre Manzanares
Adresses mail:
Raphaël Forasté: raphael.foraste@etu.sorbonne-universite.fr
Alexandre Manzanares: Alexandre.manzanares@etu.sorbonne-universite.fr
https://howtomechatronics.com/projects/diy-mars-perseverance-rover-replica-with-arduino/
Pourquoi fabriquer des rovers planétaires ?
Des sondes ont été envoyées sur Mars dès les années 70 avec les sondes Viking cependant, bien que ces sondes nous aient permis d'obtenir des informations cruciales concernant les systèmes spatiaux elles présentent tout de même une limitation majeure qu'est leur immobilité. Les rovers, utilisés pour la première lors de la mission pathfinder en 1997, sont des véhicules tout terrain capable d'être contrôlés à distance pour explorer d'autres astres et permettent donc d'obtenir plus d'informations sur de plus grands espaces en une seule mission. De plus leur mobilité leur permet de se déplacer vers des points d'intérêt précis détectés grâce à leurs caméras intégrées.
Objectifs du projet:
Réaliser un modèle miniature de rover martien pour la fête des sciences afin de présenter au public les fonctionnalités de ces appareils et leurs objectifs.
Ce rover sera idéalement muni des capteurs et modules suivants: (Les capteurs à mettre en place en priorité sont notifiés par une *)
- Baromètre*
- Thermomètre*
- Sonar (Ultrasonic sensor)*
- Camera + Mire*
- Pointeur laser *
- Système radio (Émetteur + récepteur)**
- Anémomètre
- Accéléromètre
- Bras
- Microphone
- Compteur Geiger
Matériel nécessaire:
-6X DRV8871 DC Motor Driver https://amzn.to/358jKtt
LISTE DE VIS ET AUTRES NÉCESSAIRES POUR L'ASSEMBLAGE :
4 vis m6 à tête hexagonale, longueur 8cm
2 Tiges finetées de 5cm
Matériel déjà obtenu:
-T-slot corner brackets de 2cm (×14) https://amzn.to/3aK2Dzz
-Vis et écrous M3 https://amzn.to/2SXCzMM
- 2 émetteurs et 2 récepteurs RF433MHz
- DRV8871 DC Motor Driver https://amzn.to/358jKtt
- A4988 Stepper Driver https://amzn.to/37S7ufj
- DC-DC Buck Converter https://amzn.to/38FNL6U
- 3S LiPo Battery https://amzn.to/3fjPVua
- FPV Camera and Video Transmitter
-FPV Receiver
-Poutres en Aluminium
-1 Arduino Uno
- 1 Arduino Mega
- 1 Bread board
- Laser KY-008
- Capteur de température et d'humidité: DHT11
-Sonar URM09
-Aluminum Round Tube 20mm
-Rod End Joint 8mm
-8 x Bearing 608RS – 8x22x7mm
-5 x Bearing 625RS – 5x16x5mm
-M3 Bolts various lengths
-4 x Servo horns
-Stepper Motor – NEMA 17
-XT-60 Connector
-T-slot aluminum profiles 20x20mm (nous avons pris 3 barres de 35cm, 4 barres de 40cm et une barre de 53.5cm)
Processus:
1) Réalisation du rover
-Impression armature 3D
-Assemblage de l'armature
-Eclairage
-Caméra
2) Réalisation du laboratoire
-Capteur Température et humidité
-Laser
-Capteur de distance (Sonar)
3) Communication radio
4) Gestion d'une interface permettant d'obtenir les infos du labo (Une bread board déguisée avec boutons)
Journal de bord :
30 janvier 2026 :
- Recherche de capteurs adaptés pour le labo du rover
- Choix du capteur dht11 et du laser
6 février 2026 :
- découverte d'arduino
- Création d'un programme pour allumer le laser et le capteur d'humidité
- Choix du sonar
13 février 2026 :
- création d'un programme pour arrêter les capteurs lorsque le sonar s'approche d'un obstacle
- Récupération de t slots d'alu
20 février 2026:
27 février 2026:
6 mars 2026:
13 mars 2026:

20 mars 2026 :
-Conception du bras robotique:
Taille : 50cm de longueur
5 moteurs pas-à-pas (Stepper motor) reliés à une boite à engrenage pour diminuer la vitesse de rotation du moteur et ainsi augmenter la précision (Boite à engrenage de type Harmonic drive ou train épicyloïdal).
Première articulation reliée au rover via une zone de fixation et contient un moteur permettant mouvements dans z (verticaux) + un moteur permettant mouvements dans x (horizontaux).
Deuxième articulation reliée à la première via un tube en aluminium de 1,5 cm de diamètre et est composé d'un moteur permettant mouvements dans z (verticaux)
Troisième articulation reliée à la première via le même type de tube que précédemment et est composé d'un moteur permettant de réaliser mouvements dans z (verticaux) et un autre moteur permettant mouvements dans y (circulaire dans le plan).
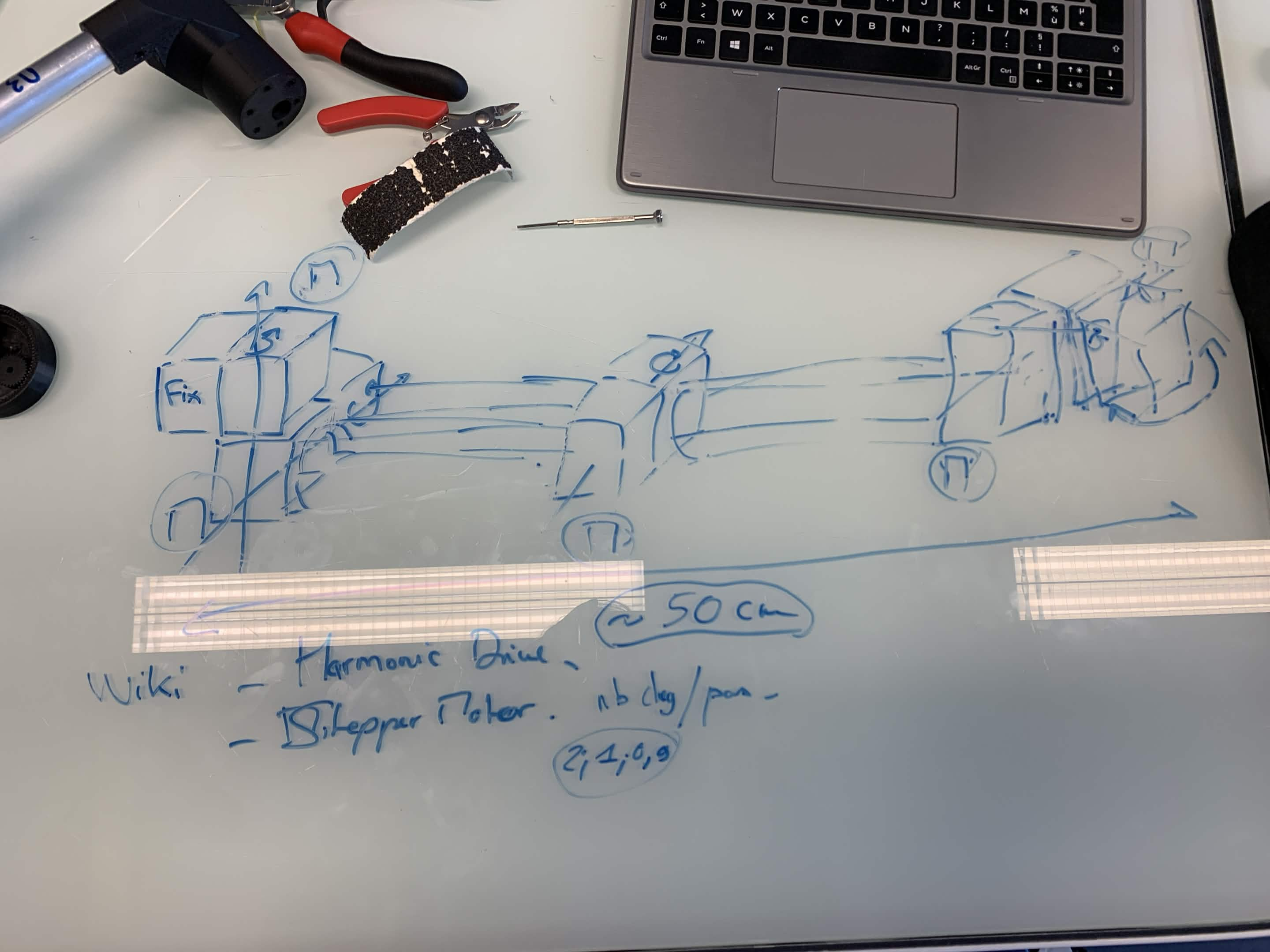
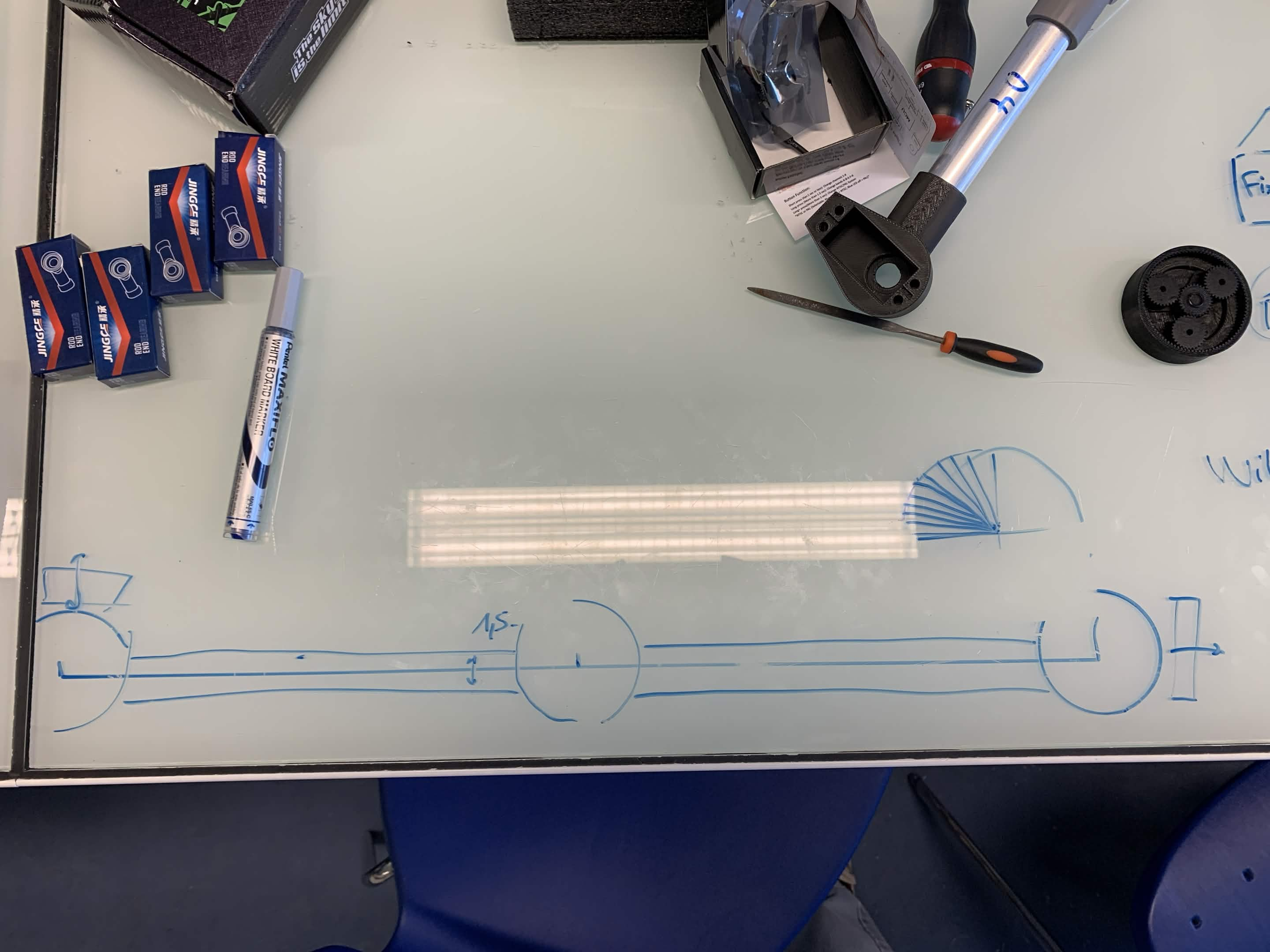
Images utilisées en tant que brouillon --> Les redessiner au propre par la suite
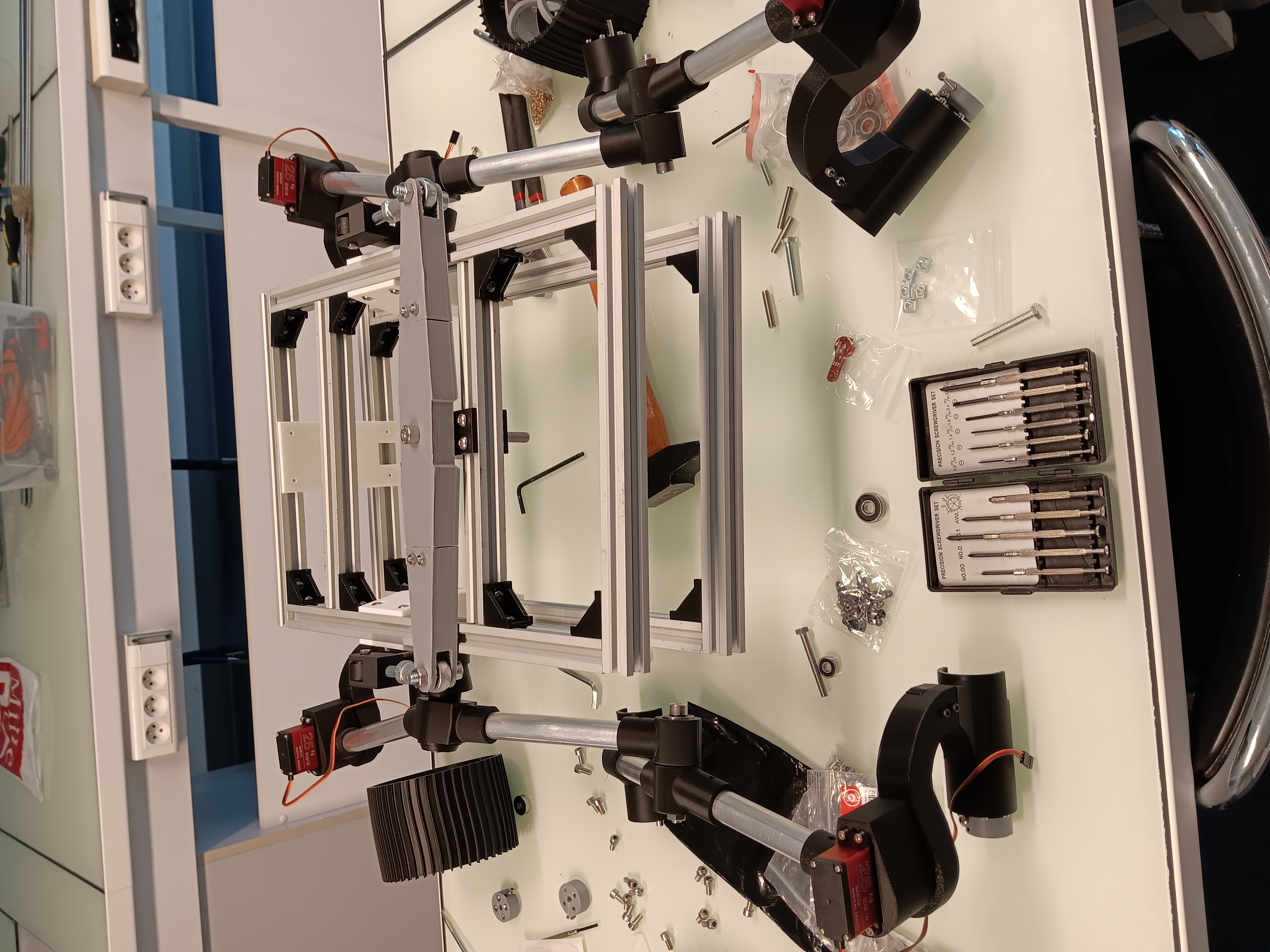
27 Mars 2026 : Tentative de finalisation du chassi
Assemblage des différents supports pour les 6 roues, insertion des 6 moteurs.
Problème de visserie (Besoin de 2 tiges finetées de 5cm) pour relier les 2 supports de roues au chassi.
No Comments