Defne Su KURTOGLU / Meritxell ALIE FABREGAS / Toufic BATACHE
Introduction
Définition du projet
Le projet consiste à fabriquer une épée rétractable imprimée en 3D, composée de plusieurs segments imbriqués qui se déploient et se rétractent à l’intérieur d’une poignée.
Ce type d’objet est souvent utilisé comme objet démonstratif pour l’impression 3D, car il met en valeur la précision des imprimantes et la possibilité de créer des mécanismes fonctionnels en une seule pièce.
Besoin
L’objectif du projet était de comprendre et expérimenter :
-
les contraintes de l’impression 3D
-
la conception d’objets articulés
-
les paramètres d’impression influençant le fonctionnement des mécanismes
Utilisateurs
Les utilisateurs potentiels sont nous juste pour le fun.
Fonctionnalité principale
Déploiement et rétraction de la lame en tirant sur la pointe.
Fonctionnalités secondaires
-
Objet compact lorsqu’il est fermé
-
Objet entièrement imprimé en une seule pièce
-
Objet pédagogique démontrant un mécanisme intégré
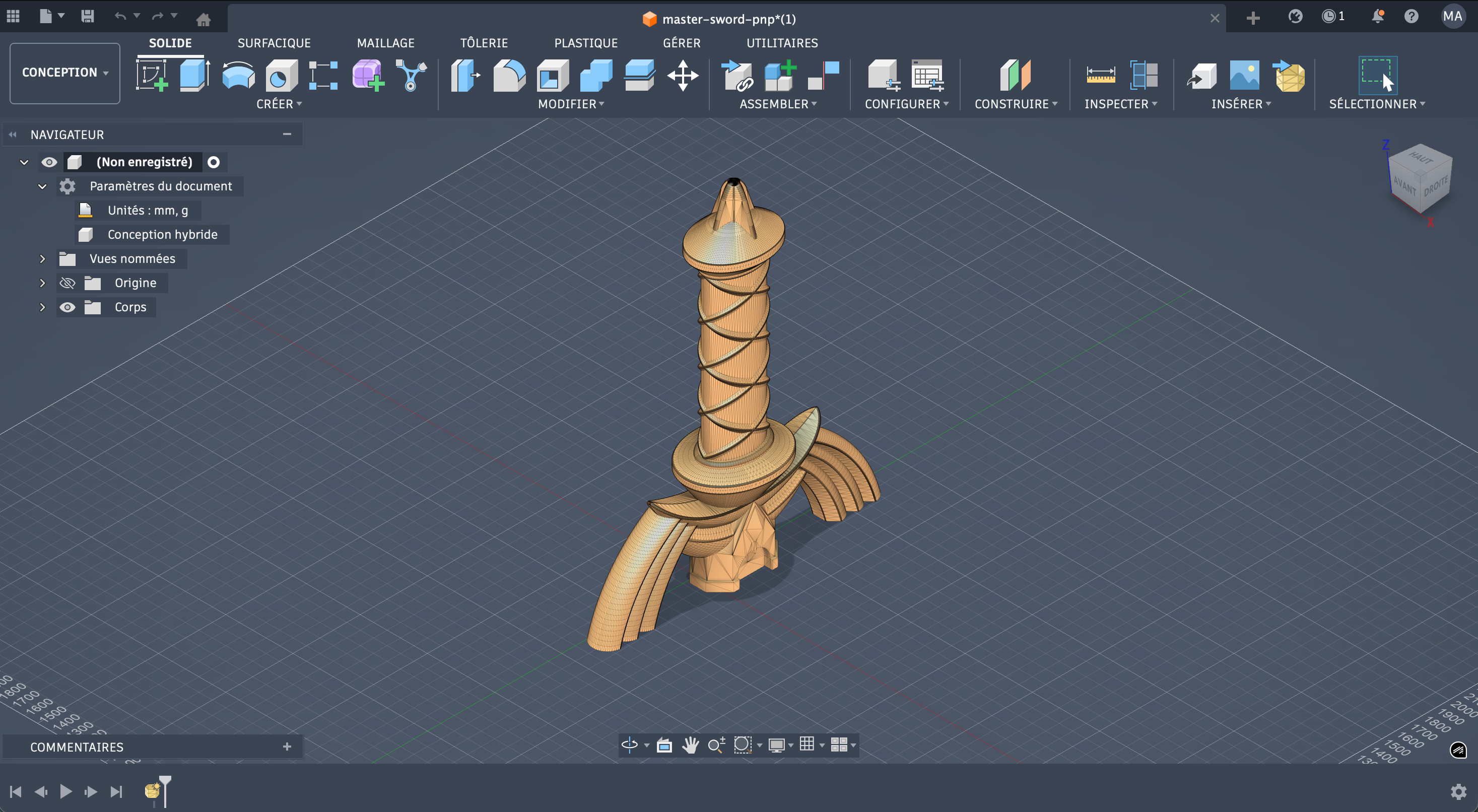
Conception sur Fusion 360
Même si le modèle provenait d’un fichier disponible en ligne, nous avons choisi de l’ouvrir et de l’étudier dans Fusion 360 afin de :
-
comprendre la structure du mécanisme
-
vérifier les dimensions
-
analyser les tolérances entre les segments
-
adapter certains paramètres si nécessaire
Cela nous a permis de mieux comprendre comment sont conçus les objets mécaniques imprimés en 3D.
Croquis et dimensions
Le modèle est composé de :
-
une poignée
-
plusieurs segments de lame télescopiques
-
une pointe
Chaque segment possède :
-
une forme légèrement conique
-
un jeu mécanique permettant le glissement
Étapes dans Fusion 360
-
Importation du modèle
-
Analyse des composants
-
Vérification des tolérances
-
Export du fichier en STL
Choix techniques
Plusieurs choix techniques ont été faits :
-
impression en une seule pièce
-
tolérance entre segments permettant le mouvement
-
orientation verticale pour limiter les supports
Ces choix visent à permettre au mécanisme de fonctionner immédiatement après impression.
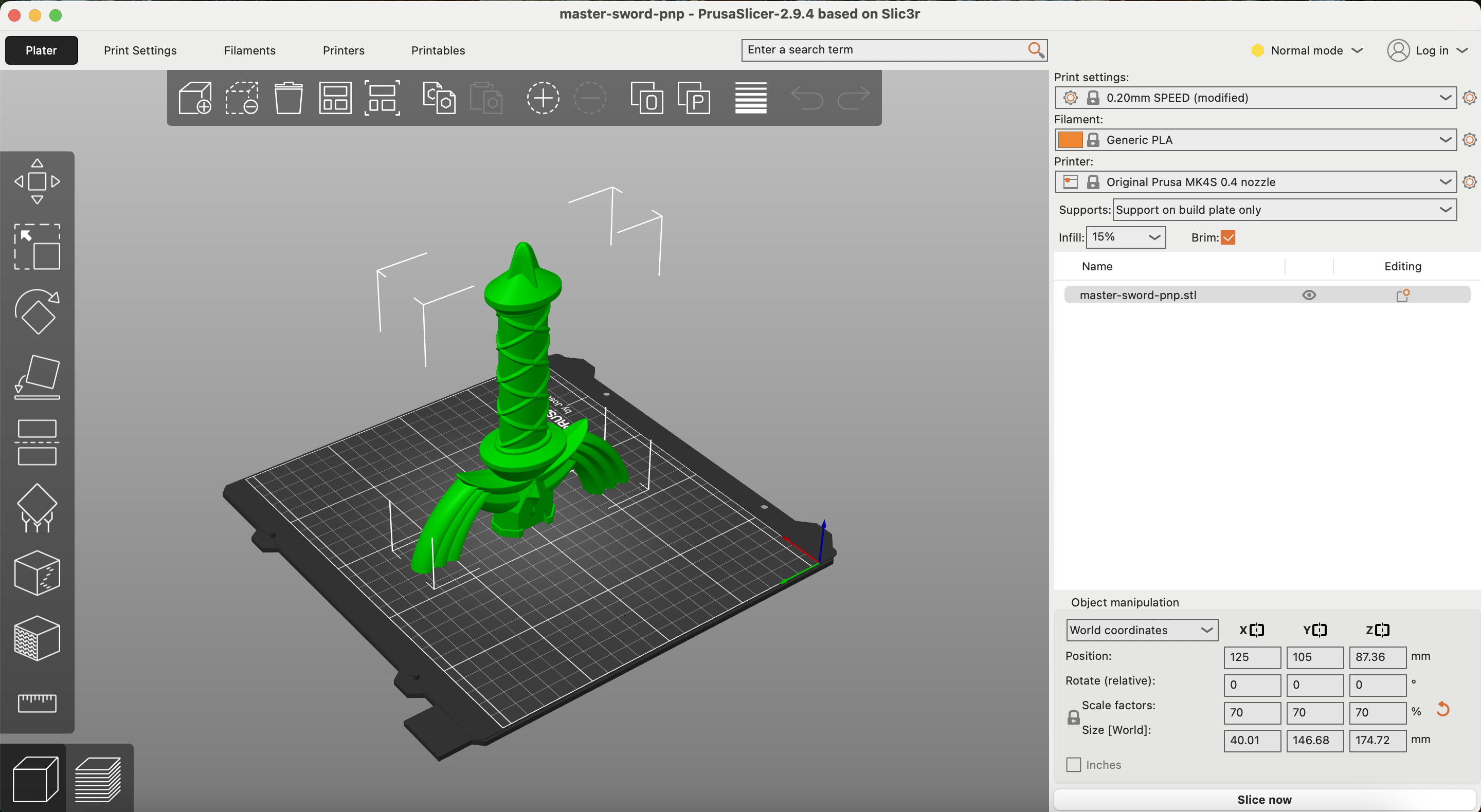
Préparation à l'impression (PrusaSlicer)
Le fichier STL a été importé dans PrusaSlicer pour préparer l'impression.
Paramètres utilisés
Paramètres principaux :
-
hauteur de couche : 0.2 mm
-
remplissage : 15 %
-
matériau : PLA
-
supports : peu de supports
Nous avons conservé les paramètres recommandés par le modèle trouvé en ligne.
Orientation
L'objet a été imprimé verticalement, ce qui permet :
-
de conserver la précision des segments
-
de limiter les supports
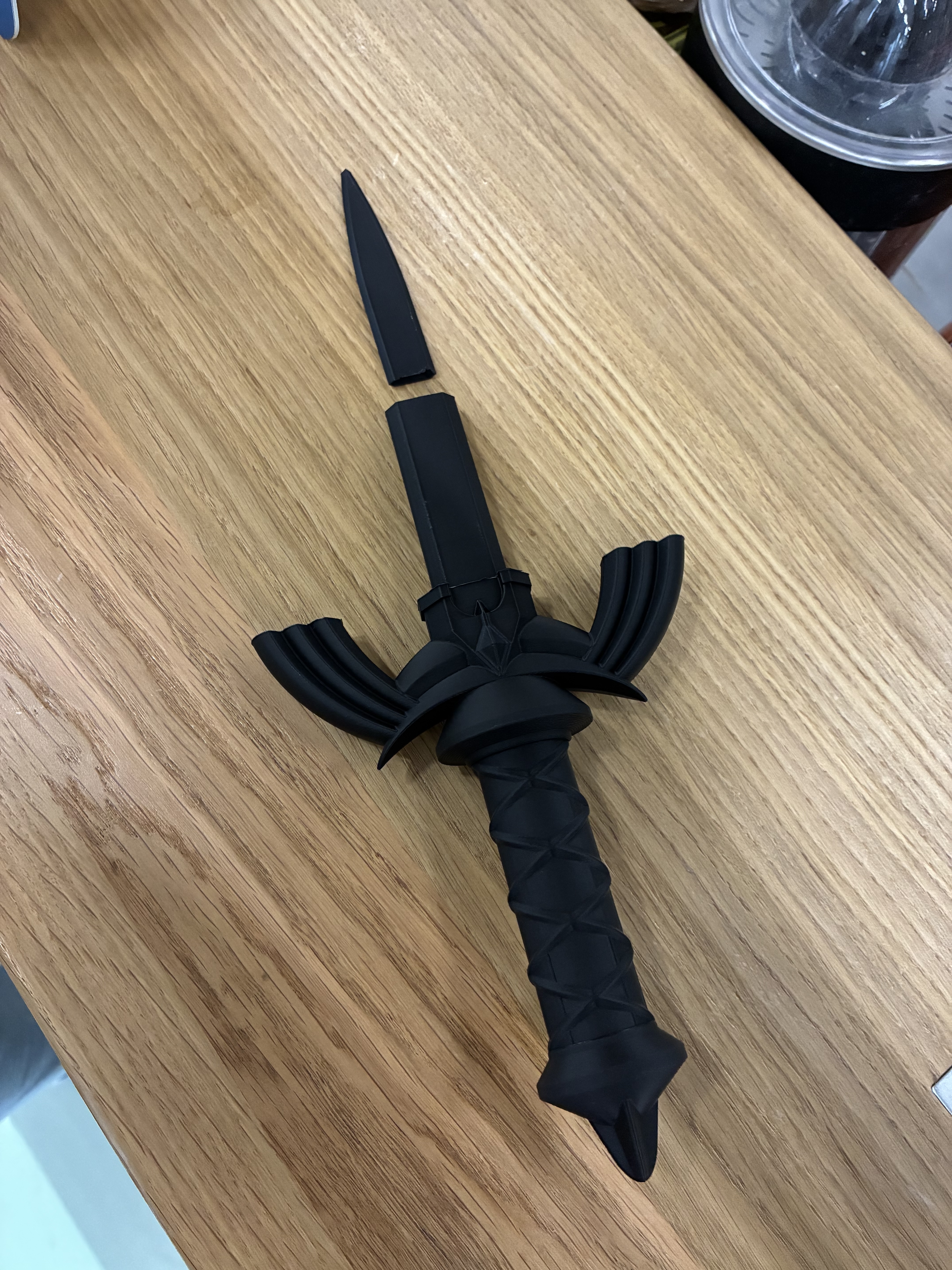
Résultats
Après l'impression, l'objet a été retiré du plateau.
Malheureusement, l'épée ne se rétractait pas correctement.
Les segments semblaient :
-
bloqués
-
difficiles à faire glisser
Nous avons essayé de tirer doucement sur la pointe et faire bouger les segments mais le mécanisme restait bloqué


Analyse des problèmes
Plusieurs hypothèses ont été identifiées :
-
Surface trop rugueuse : Les couches d'impression peuvent créer des irrégularités empêchant les segments de glisser.
-
Supports gênants : Certains supports peuvent avoir laissé des résidus dans les interstices.
-
Tolérances insuffisantes : Le jeu entre les segments peut être trop faible pour compenser les imperfections d'impression.
Conclusion
Ce projet nous a permis de découvrir :
-
la conception d'objets mécaniques imprimés en 3D
-
les contraintes de tolérance
-
l'importance des paramètres d'impression
Même si l'épée ne fonctionne pas parfaitement, l'expérience reste très instructive.
Améliorations possibles
Plusieurs pistes d'amélioration existent :
-
augmenter les tolérances entre les segments
-
réduire les supports
-
utiliser une hauteur de couche plus fine
-
utiliser un filament plus précis
-
poncer légèrement les surfaces
Il serait également possible de modifier le modèle dans Fusion 360 afin d'améliorer la fluidité du mécanisme.
No Comments