Projet Mécanisme de Peaucellier-Lipkin
Contexte et origine du projet
En L2, on avait fait un projet de mécanismes où on simulait la marche avec le mécanisme de Jansen - c'est le Kraken Rover. Ce qui nous avait vraiment marqués, c'est qu'avec un seul moteur et un bon mécanisme, on pouvait sortir un mouvement complètement différent d'une simple rotation. On avait trouvé ça très inspirant, et l'idée nous est restée en tête.
Quelques temps après, on est tombés sur cette vidéo TikTok qui montrait comment tracer une ligne droite de manière totalement over-engineered. On a trouvé ça à la fois marrant et vraiment intéressant, donc on a décidé de reproduire ce méchanisme.
Le mécanisme de Peaucellier-Lipkin
Histoire
Le mécanisme de Peaucellier-Lipkin a été inventé en 1864. C'est le premier mécanisme plan capable de convertir un mouvement de rotation en un mouvement parfaitement rectiligne, sans aucun guidage mécanique. Il porte le nom de deux personnes qui l'ont développé indépendamment : Charles-Nicolas Peaucellier, un officier de l'armée française (1832–1913), et Yom Tov Lipman Lipkin, un mathématicien lituanien (1846–1876). Avant ça, personne n'avait réussi à faire une droite parfaite avec un mécanisme plan.
Théorie et formule
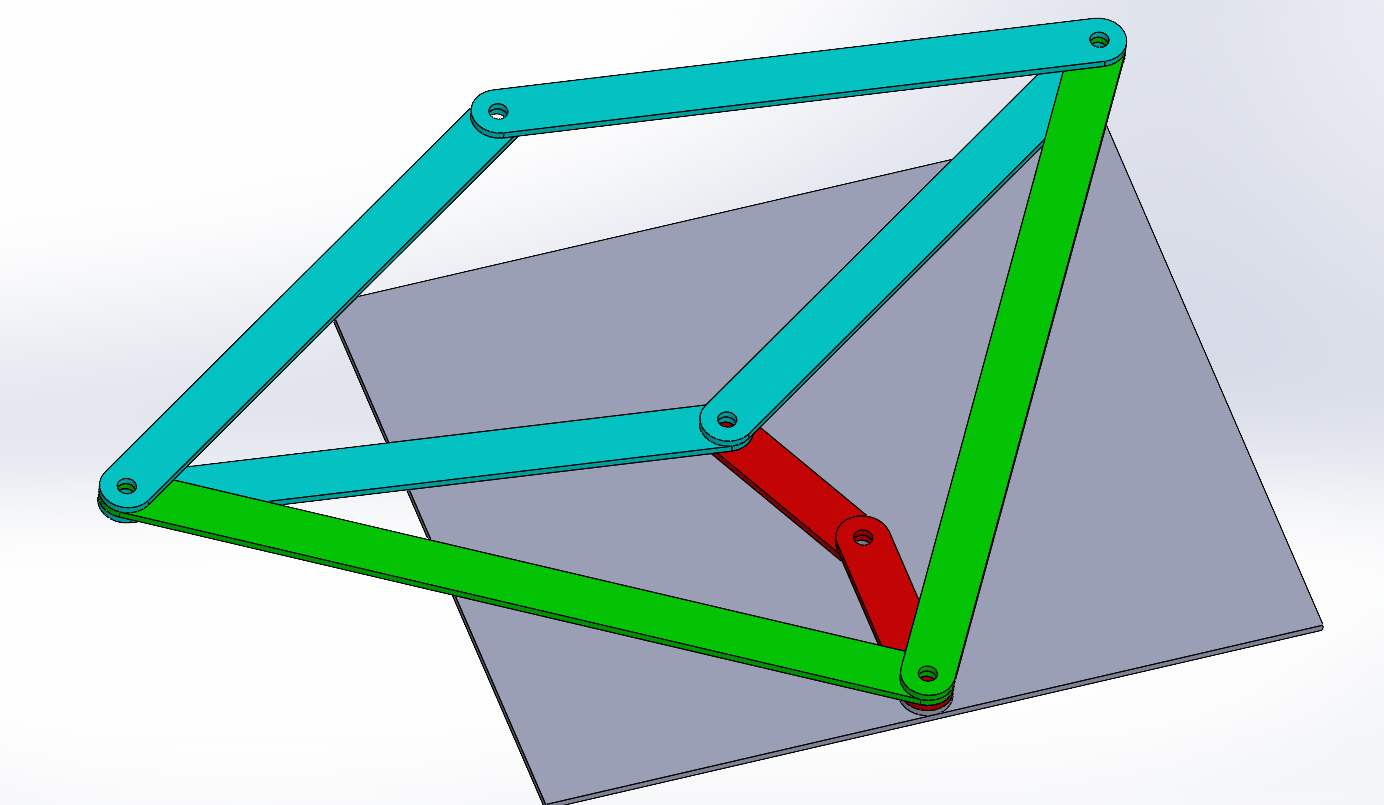
Le mécanisme utilise le principe d'inversion géométrique. Concrètement, il est composé de 7 tiges : quatre forment un losange (ABCD), deux tiges de même longueur relient un point fixe O aux deux sommets opposés du losange, et une dernière tige force le point B à rester sur un cercle passant par O.
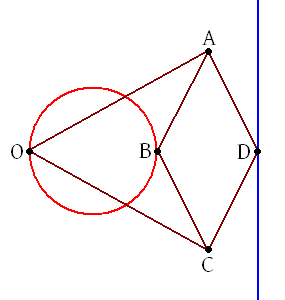
La propriété centrale du mécanisme, c'est que le produit des distances OB × OD reste constant :
OB×OD=OA2−AB2=constante
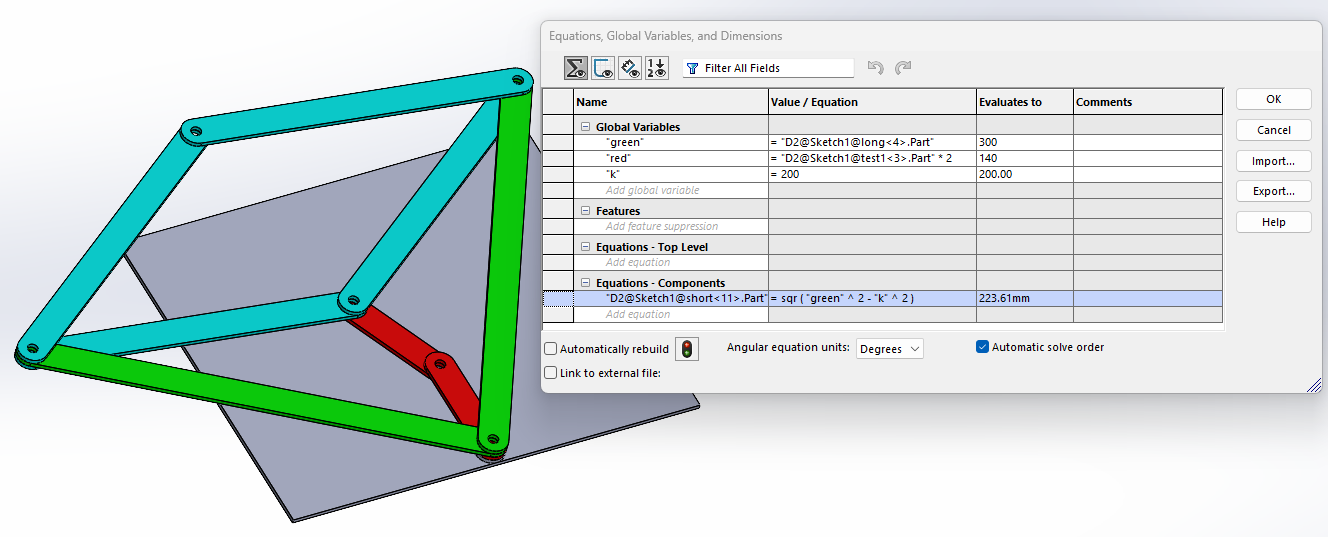
Dans SolidWorks, on a défini les dimensions avec trois variables globales : green (les grandes tiges = 300 mm), red (les petites tiges du losange = 140 mm) et k = 200 mm. La longueur de la tige courte est ensuite calculée automatiquement :
short = √(green² − k²) = √(300² − 200²) ≈ 223,61 mm
C'est cette relation qui garantit que le point D trace une ligne parfaitement droite quand B tourne. Dans le montage, deux points restent fixes : le point O (ancrage principal) et le centre du cercle décrit par B.
Voici une simulation sur Geogebra.
Preuve de concept
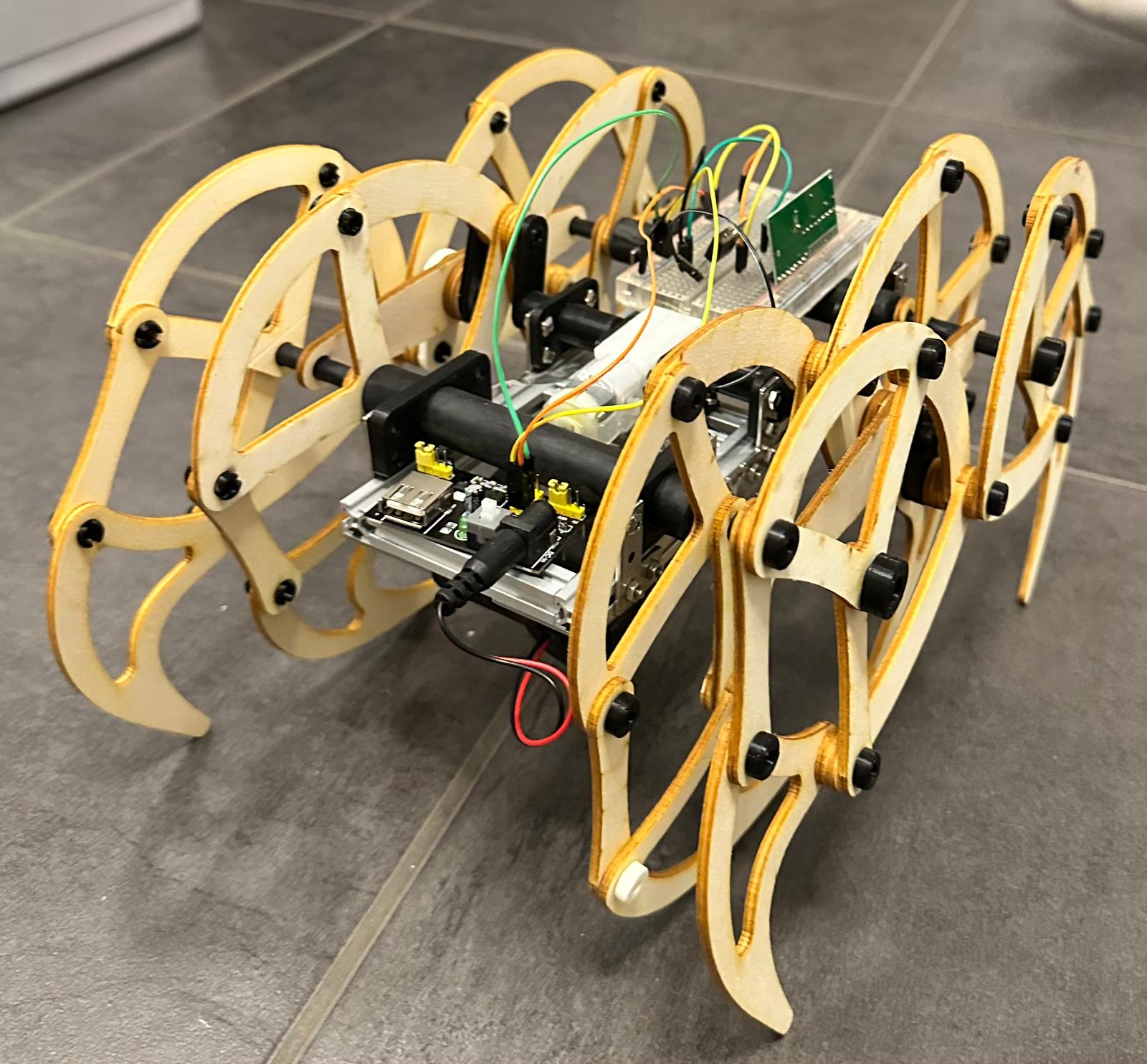
On a d'abord tout modélisé sur SolidWorks pour vérifier que ça marchait en simulation et effectivement, la trajectoire était parfaitement droite. On est ensuite passés à la pratique en découpant tout le mécanisme au laser. Globalement, ça fonctionnait : la trajectoire était à peu près droite.
Mais le problème était clairement visible : trop de jeu dans les articulations.
Les jointures avaient été imprimées en 3D avec un peu de jeu exprès pour éviter que ça coince, sauf qu'avec 6 axes dans la chaîne, tous ces petits jeux s'accumulent.
En touchant juste légèrement l'organe terminal, on pouvait le faire bouger de 2 à 3 cm vers le haut ou vers le bas c'était vraiment inutilisable.
Solution : les roulements à billes

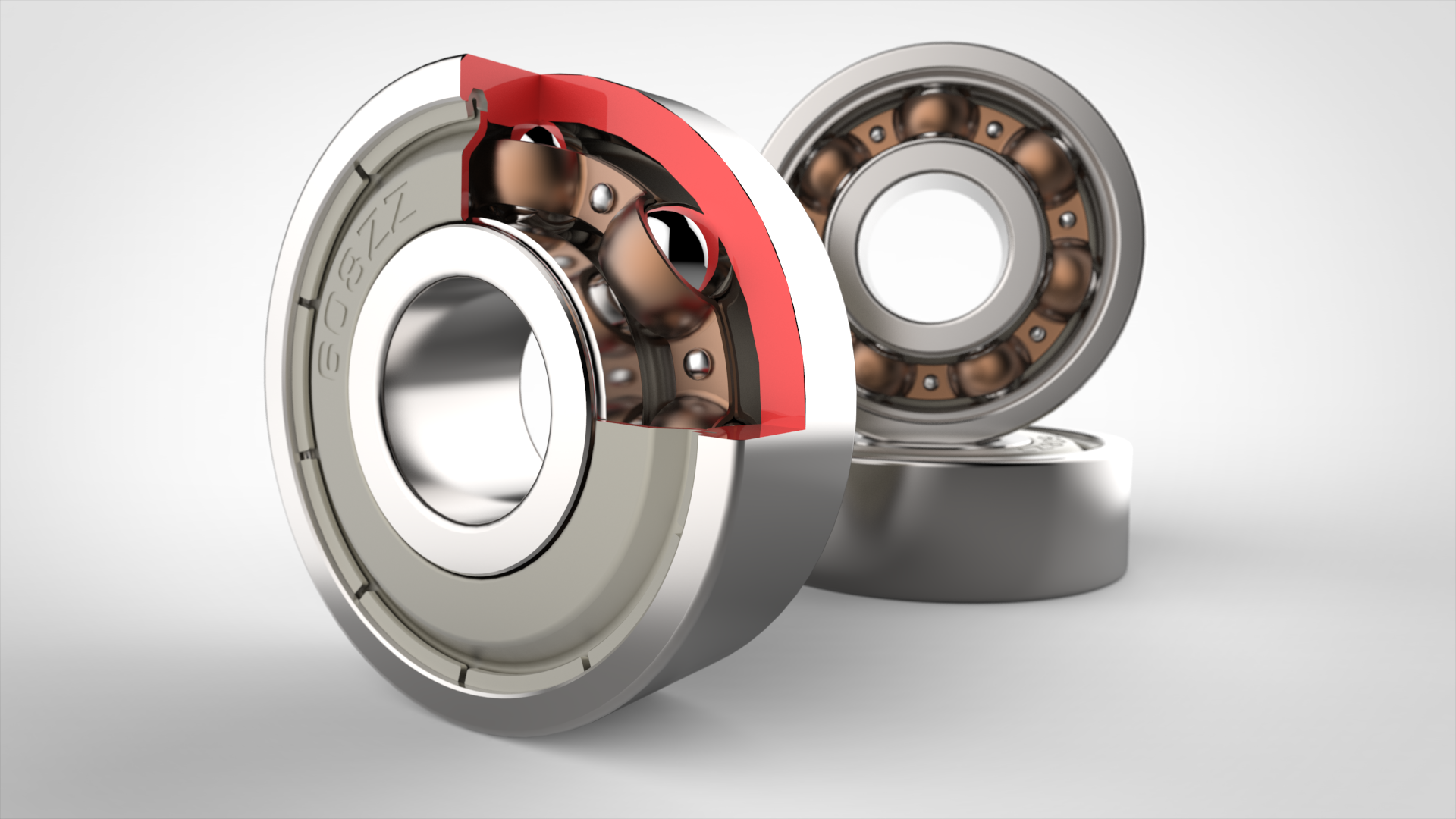
L'idée nous est venue à la salle de sport. On regardait les machines fonctionner sous des charges importantes sans vibrer ni avoir de jeu apparent, et on a réalisé qu'elles utilisaient des roulements à billes. Un roulement à billes, c'est une pièce qui permet à deux éléments de tourner l'un par rapport à l'autre grâce à des billes coincées entre une bague intérieure et une bague extérieure.
Résultat : très peu de frottement, et surtout quasi aucun jeu radial exactement ce dont on avait besoin.
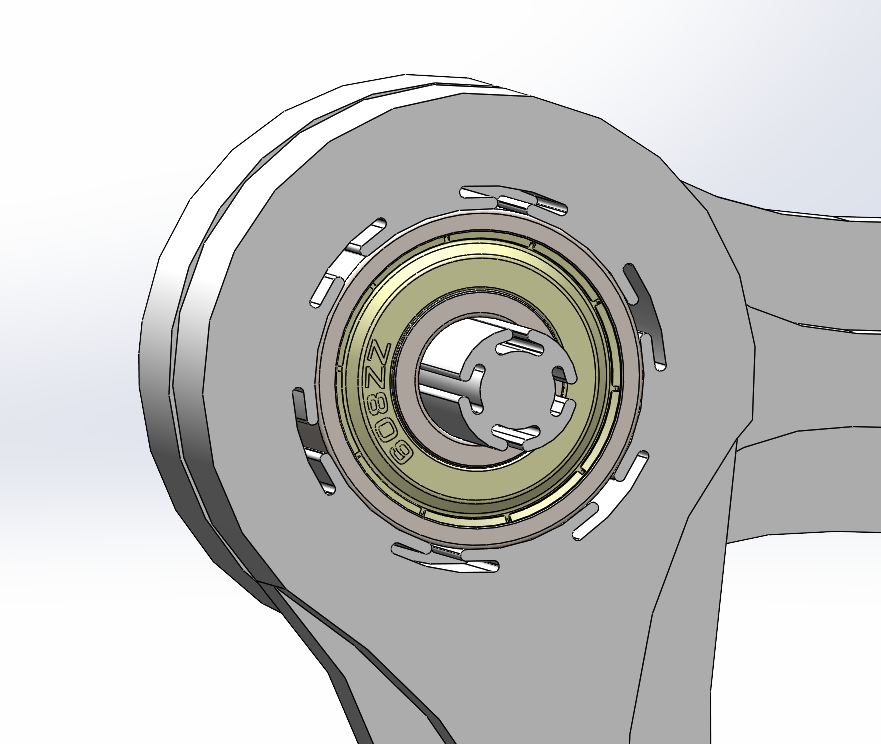
Conception des supports de roulement
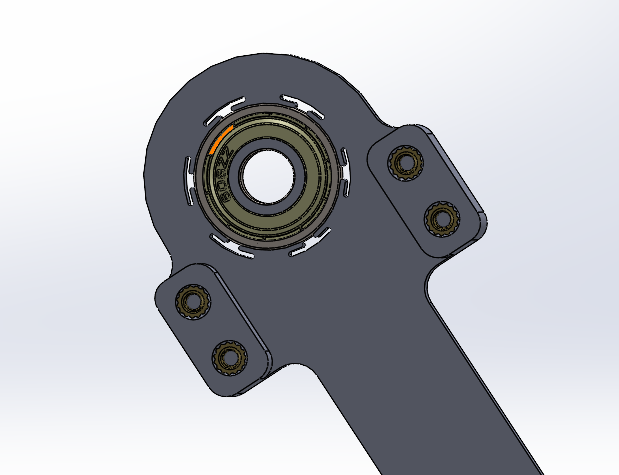
Pour que les roulements soient maintenus correctement, on a conçu une pièce qui appuie en permanence sur les deux bagues du roulement, comme un petit effet ressort, pour supprimer tout jeu. On a imprimé plusieurs versions avec des diamètres légèrement différents (21,00 / 21,25 / 21,50 / 21,75 / 22,00 mm) pour trouver le bon compromis entre assemblabilité et absence de jeu. On a utilisé des roulements 608ZZ.

Reconstruction du mécanisme
Une fois qu'on avait trouvé les bonnes cotes, on a reconstruit tout le mécanisme avec les roulements à billes à chaque articulation. La géométrie reste exactement la même que pour la preuve de concept, seules les jonctions entre axes ont changé.
Intégration du servomoteur
Pour faire tourner le mécanisme, on a intégré un servomoteur digital 20 kg (DC 4,8–6,8 V). Cette partie a demandé de résoudre deux problèmes séparément :
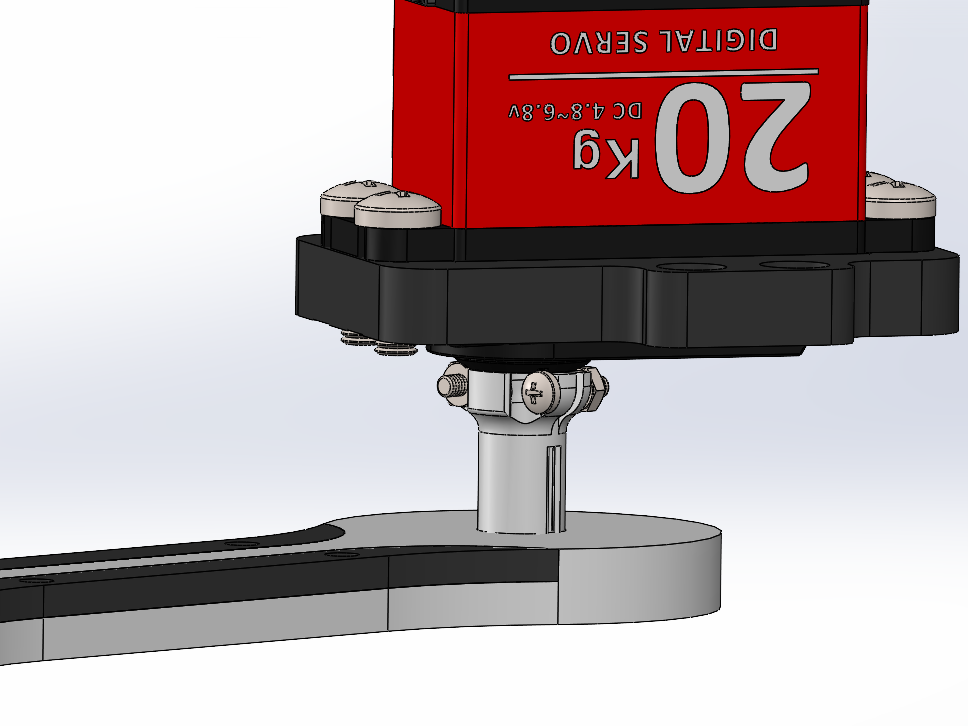
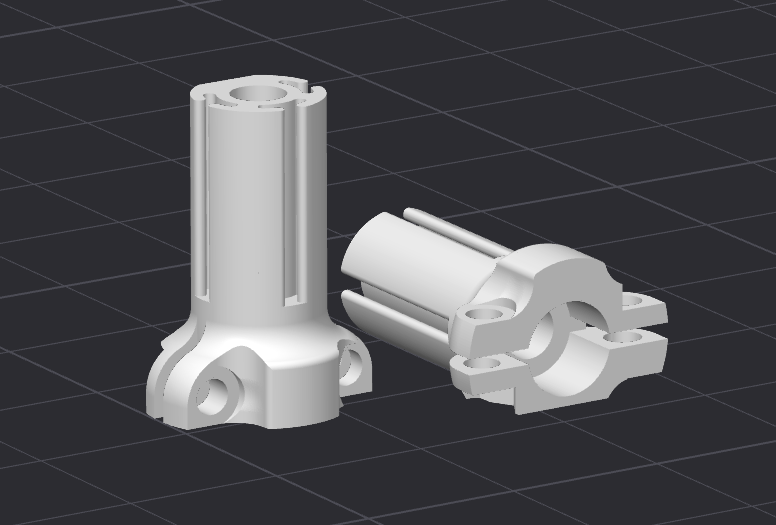
Fixer le moteur à la base : On a designé un support moteur imprimé en 3D qui vient entourer le servo. Pour le maintenir, on a utilisé la technique du boulon noyé on noie un écrou dans la pièce pendant l'impression pour pouvoir visser directement dedans. Ce support est ensuite fixé à la tige fixe du mécanisme via des inserts filetés.
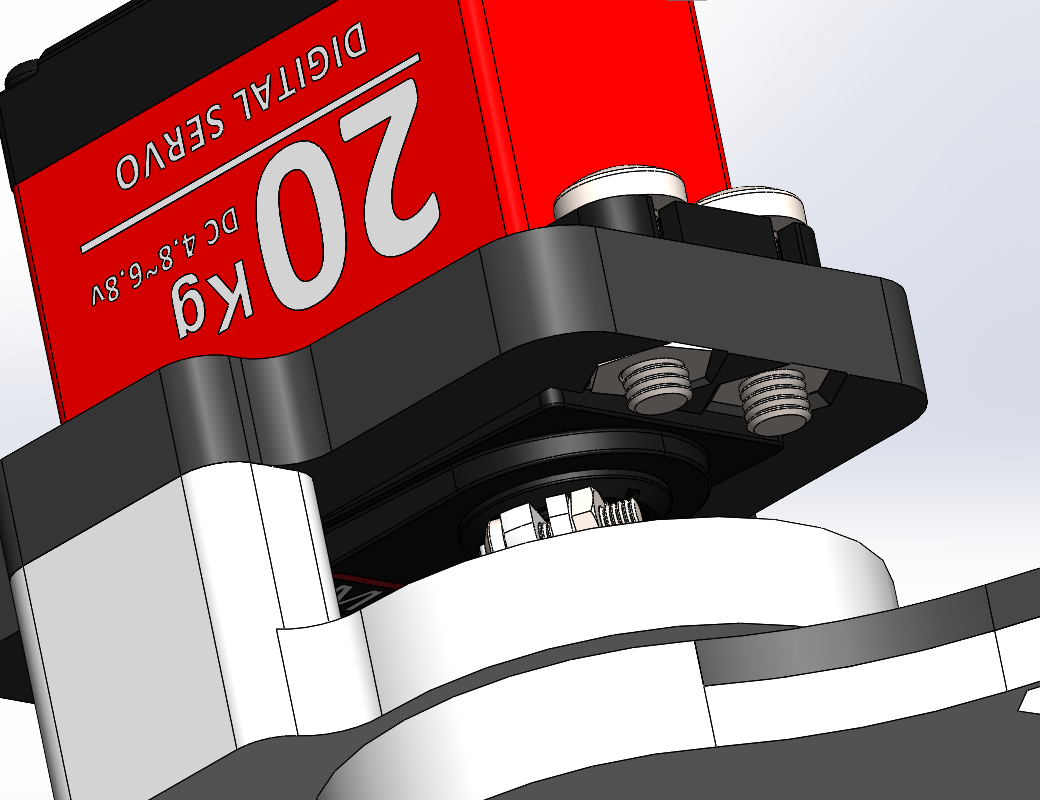
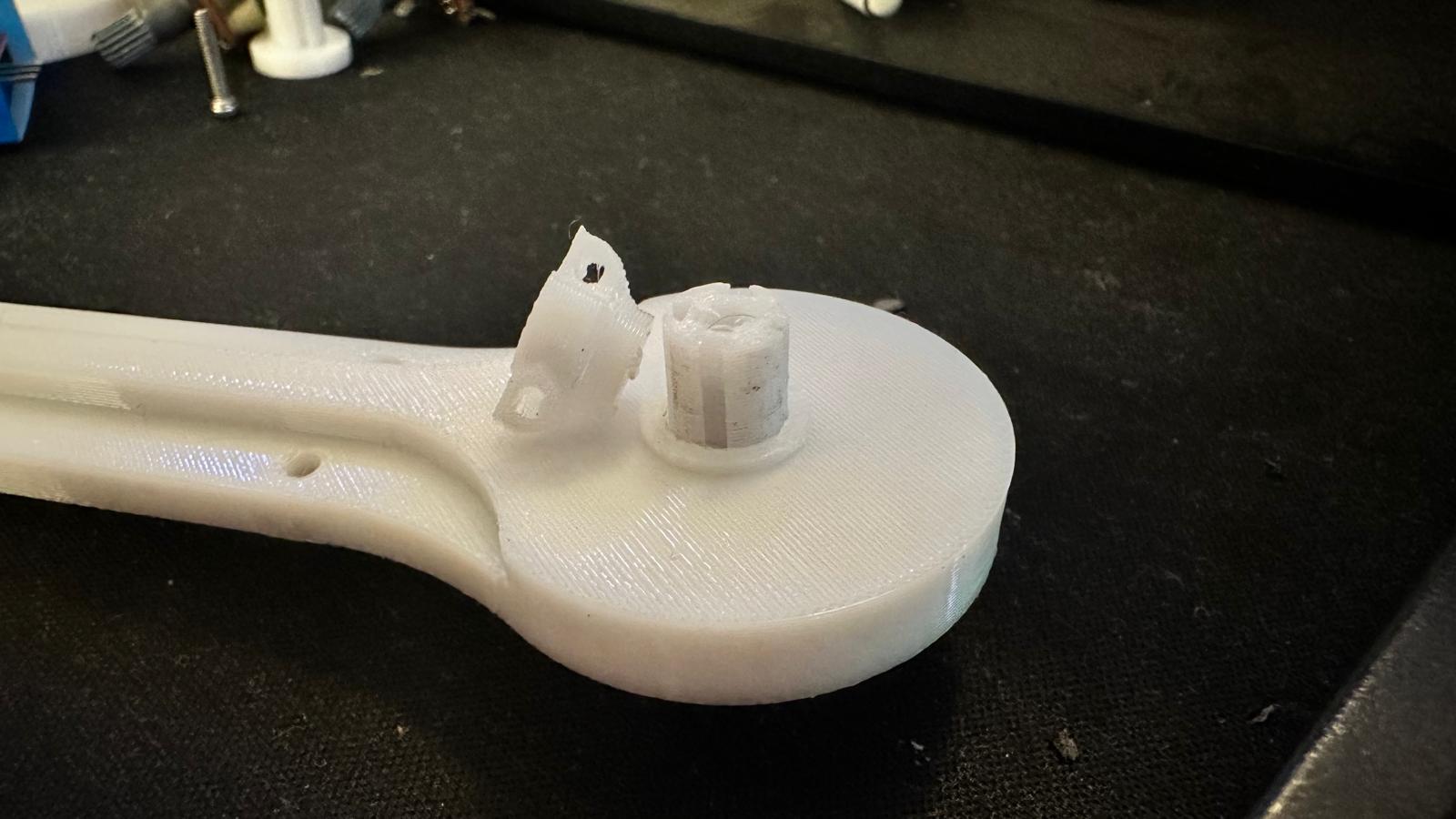
Transmettre le mouvement : La pièce la plus difficile à concevoir, c'est celle qui fait le lien entre l'arbre du moteur et la tige mobile. Il fallait qu'elle se fixe sans jeu sur l'arbre du servo, qu'elle transmette correctement le couple, et qu'elle soit à la fois petite et solide. La solution finale se serre sur l'arbre avec une vis et un boulon, et s'encastre directement dans la tige mobile.
Un premier problème qu'on a eu : la pièce cassait pendant les tests. En fait, on l'avait imprimée à la verticale, donc les couches d'impression étaient parallèles à l'effort de rotation et c'est précisément là que ça cassait. En la réimprimant à plat, les couches sont perpendiculaires à l'effort, et là ça a tenu sans problème.
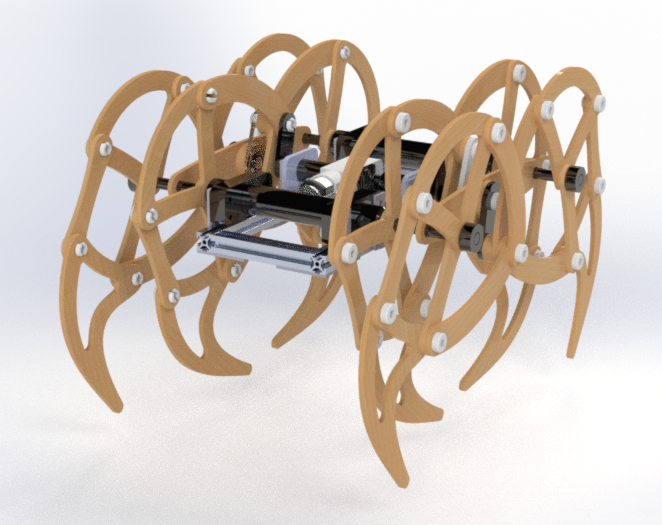
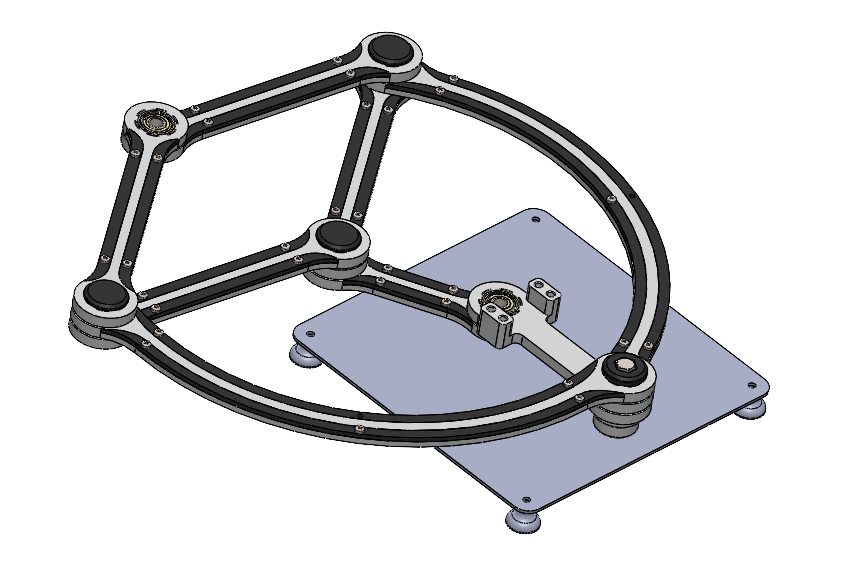
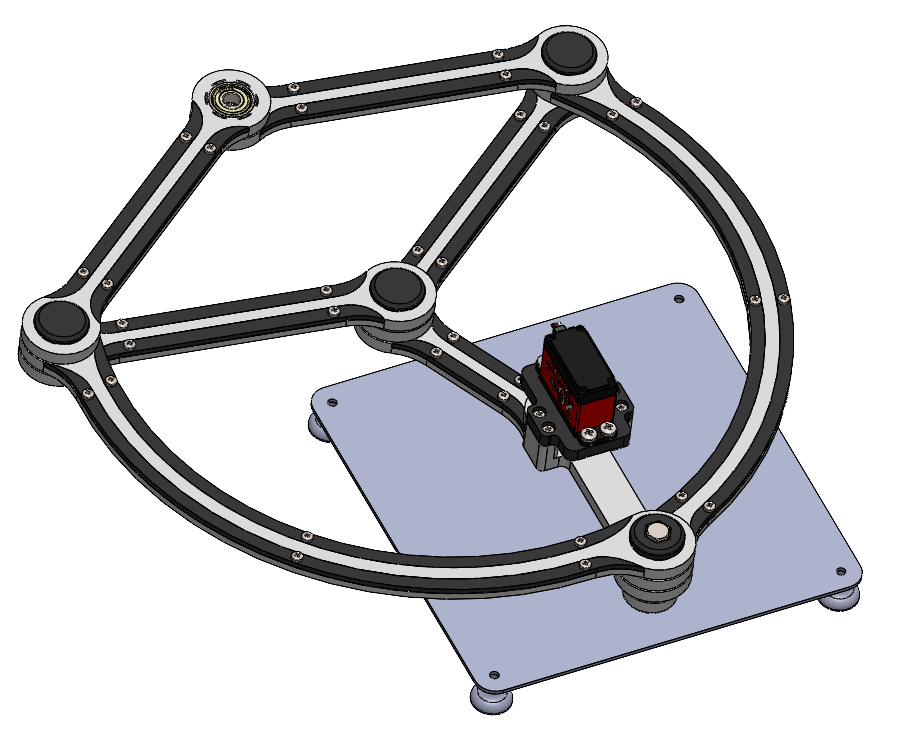
Design final mécanique
Voici le rendu SolidWorks final de la partie mécanique : le servomoteur sur son support central, le mécanisme complet avec les roulements à chaque nœud, et la tige terminale pour accueillir le stylo.
Partie électronique
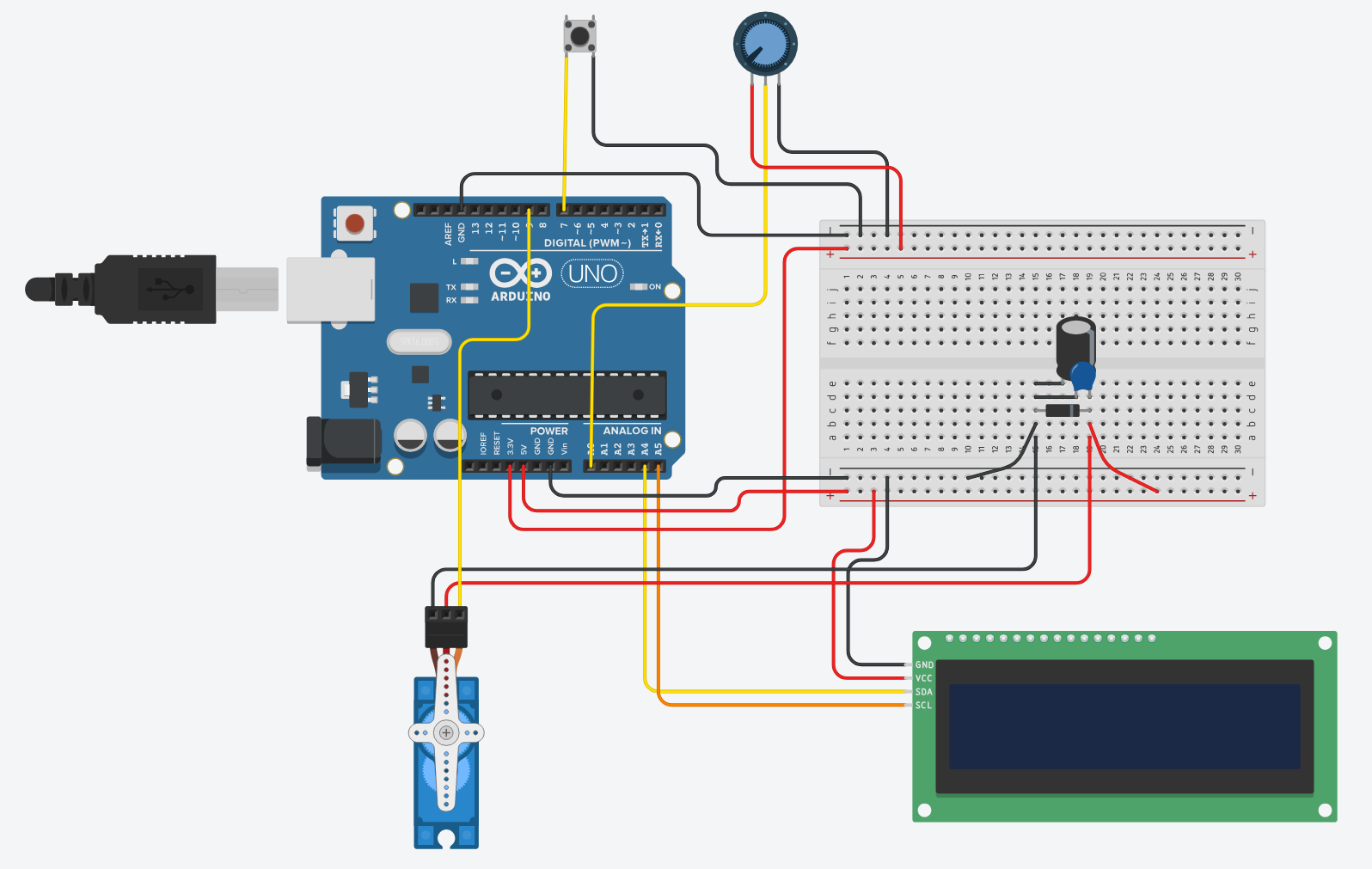
Architecture du système
On a utilisé un Arduino UNO R4 comme microcontrôleur, avec :
-
Un potentiomètre (A5) pour contrôler l'angle du servo manuellement
-
Un écran LCD I2C 16×2 (SDA-A4/SCL-A5) pour afficher l'angle en temps réel
-
Un interrupteur à clé (pin 7) pour allumer/éteindre le système (ajouté pour le fun)
-
Le servomoteur (pin 9)
Composants de filtrage et protection
On a ajouté quelques composants passifs pour rendre le circuit plus stable.
Une diode de roue libre protège l'Arduino des pics de tension inverse que peut générer le servo quand il change de sens.
Un condensateur électrolytique (~100–470 µF) sur la ligne d'alimentation du servo lisse les appels de courant au démarrage et évite les resets intempestifs de l'Arduino.
Un condensateur céramique (~100 nF) en parallèle filtre les parasites haute fréquence.
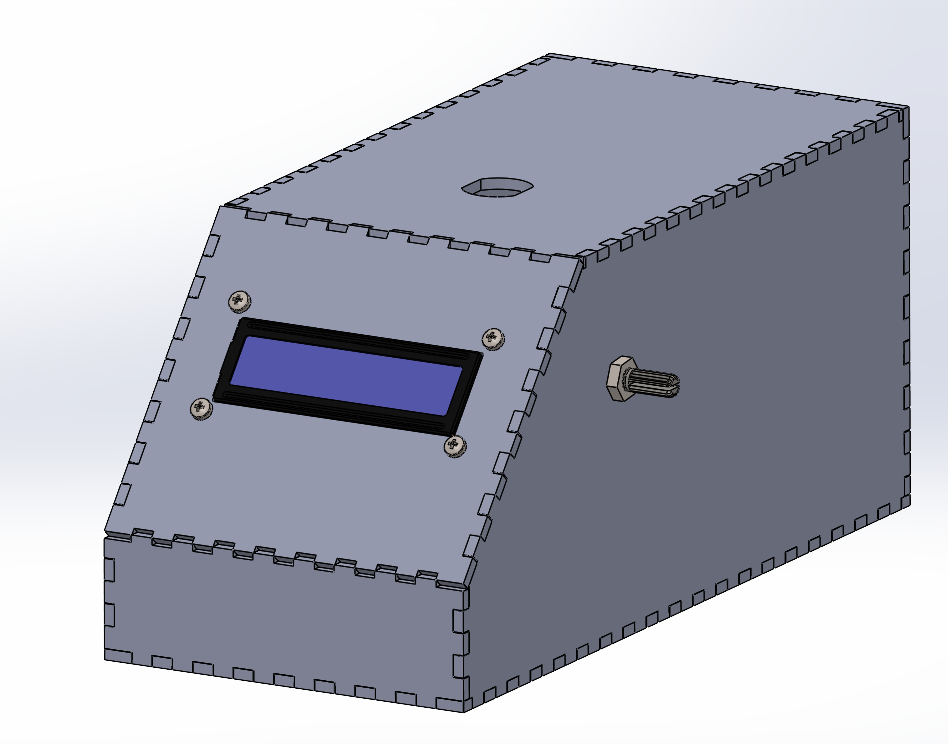
Boîtier électronique
Pour ranger proprement tout l'électronique, on a découpé au laser une boîte en contreplaqué. Le panneau avant est incliné et accueille l'écran LCD (fixé par quatre vis), le potentiomètre est accessible sur le côté, et le bouton-clé est monté en façade. Les assemblages en finger joints assurent la rigidité de l'ensemble.
Résultats et améliorations
Bilan
Les résultats sont bien meilleurs qu'avec la preuve de concept. Les traits sont beaucoup plus droits, les vibrations ont clairement diminué, et le mécanisme tourne nettement plus facilement. Il reste quand même un peu de jeu au niveau de l'organe terminal la fixation du stylo ce qui nuit encore légèrement à la précision du tracé.
Ce qu'on améliorerait
Électronique : Passer d'une breadboard à un PCB dédié pour éviter les courts-circuits et avoir un montage plus propre et fiable
Motorisation : Utiliser un moteur pas à pas plutôt qu'un servo, pour un contrôle angulaire plus précis et sans dérive
Organe terminal : Trouver un système de fixation rigide pour le stylo afin d'éliminer le jeu restant et avoir un tracé vraiment propre
No Comments