Shreelakshmi VEDANAYAGAME
Exercice 3 :
Contexte et Objectifs :
Pour ce troisième exercice, l'objectif était de dépasser l'impression d'un objet purement plastique pour créer un objet "hybride". Le cahier des charges proposait plusieurs options complexes (mécanique, emboîtement, ou insertion interne). J'ai choisi de réaliser une pièce d'échec (Reine) comportant une cavité interne. L'enjeu est de stopper l'impression à un moment précis pour insérer un poids métallique (ou un composant) afin de donner de l'inertie et une sensation de qualité à la pièce, avant de "fermer" l'objet par les dernières couches d'impression.
Matériel et Machine utilisés :
-
Logiciel de découpage : PrusaSlicer 2.5.0.
-
Imprimante 3D : Prusa MINI & MINI+ originale.
-
Filament : Prusament PLA (Couleur Or/Jaune).
-
Paramètres : Hauteur de couche 0.20mm SPEED, Remplissage 20%, sans supports.
-
Composant inséré : Pièce métallique (aimant).
Étapes de fabrication :
-
Préparation du modèle : Utilisation du fichier
shree.stlavec des dimensions de 26 x 26 x 51 mm. -
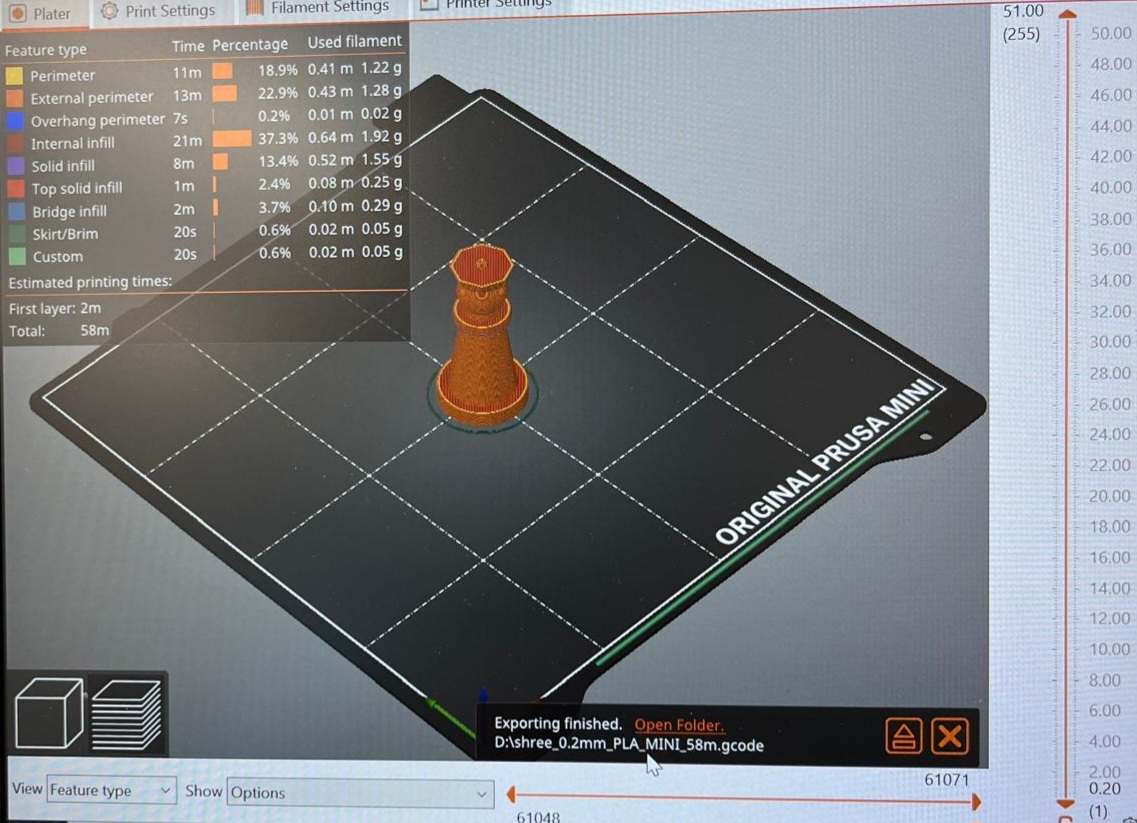
Programmation de la pause : Contrairement à une pause manuelle imprécise, la pause a été programmée directement dans PrusaSlicer à une hauteur spécifique (avant la fermeture de la cavité).
-
Lancement : Impression sur Prusa MINI pour une durée totale de 58 minutes.
-
Insertion physique : Une fois l'imprimante en pause et la tête dégagée, insertion du composant dans le trou d'environ 0,5 cm de diamètre.
-
Finalisation : Reprise de l'impression pour recouvrir l'objet inséré.
Code utilisé :
// --- PARAMÈTRES ---
diametre_aimant = 15.5;
epaisseur_aimant = 3.2; // Un peu plus que 3mm pour que la buse ne touche pas l'aimant
marge_fond = 1.2; // Épaisseur de plastique sous l'aimant
$fn = 60;
// --- CONSTRUCTION DE LA REINE ---
difference() {
// CORPS GLOBAL
union() {
cylinder(h = 5, d = 26); // Socle légèrement plus large
translate([0, 0, 5]) cylinder(h = 30, d1 = 20, d2 = 10); // Corps
translate([0, 0, 30]) cylinder(h = 3, d = 16); // Collerette
translate([0, 0, 40]) sphere(d = 14); // Tête
translate([0, 0, 45]) cylinder(h = 4, d1 = 14, d2 = 18, $fn = 8); // Couronne
translate([0, 0, 49]) sphere(d = 4); // Sommet
}
// CAVITÉ CACHÉE (L'aimant sera à l'intérieur)
// On le lève de "marge_fond" pour qu'il y ait du plastique en dessous
translate([0, 0, marge_fond])
cylinder(h = epaisseur_aimant, d = diametre_aimant);
}Visualisation :
Résultat :

ERREUR : On observe ici le résultat d'une pause tentée manuellement. Le trou destiné à l'insertion (environ 0,5 cm) a commencé à se refermer prématurément, rendant l'introduction de l’aimant impossible à cette étape.
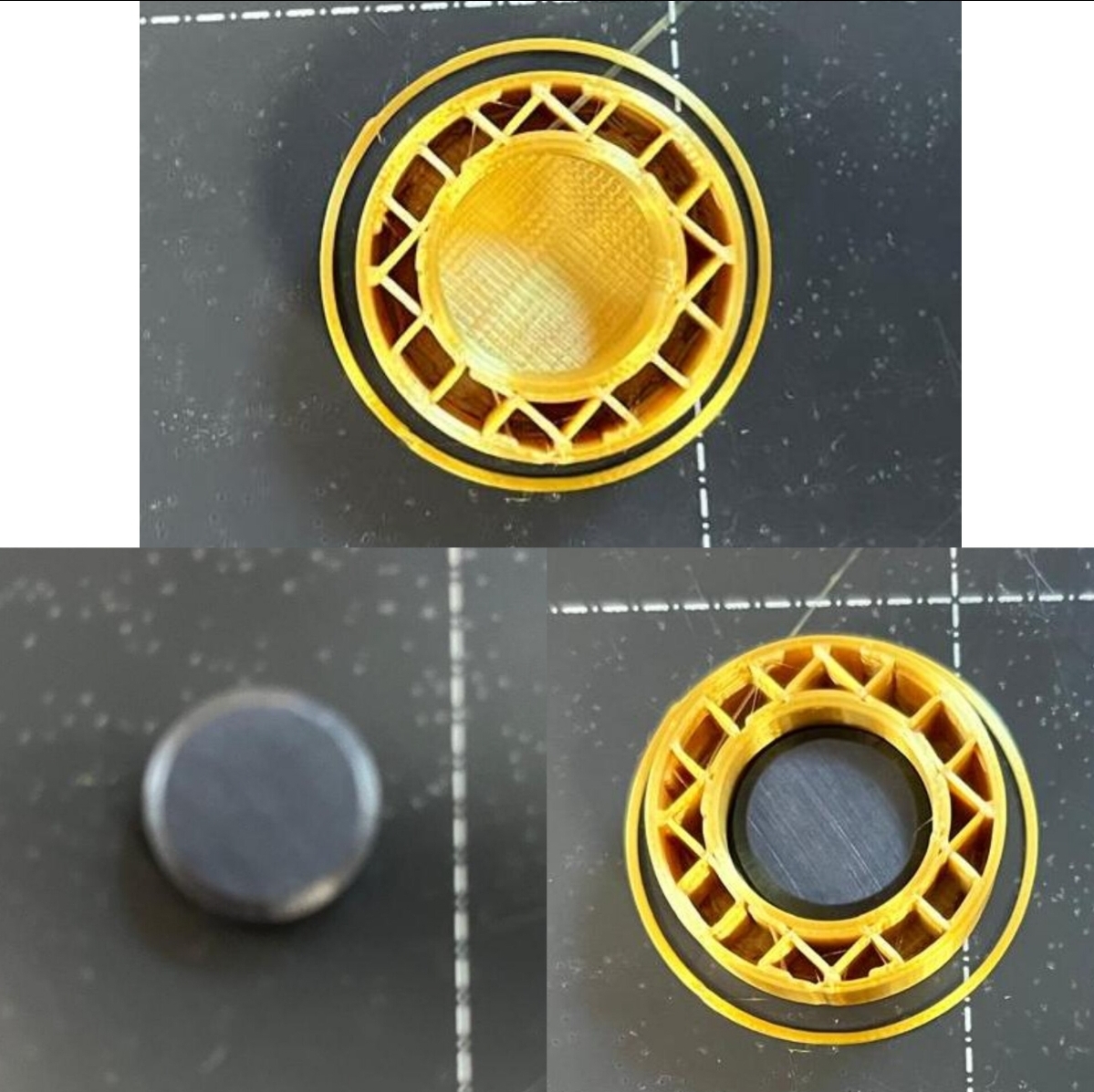
Ici, contrairement à l'essai manuel, la pause logicielle permet de dégager la tête d'impression tout en maintenant le plateau à température. On voit ici l'aimant parfaitement positionné dans son réceptacle avant que l'imprimante ne vienne "fermer" le sommet de la Reine avec les dernières couches de PLA.

Observations et Analyse :
L'analyse de cet exercice repose sur la gestion critique de l'erreur humaine versus la précision logicielle :
-
Analyse de l'échec initial : Ma première tentative de mise en pause manuelle a été un échec. Le fait de stopper la machine à la main a entraîné une légère déformation du trou de réception et un refroidissement hétérogène de la couche supérieure, rendant l'insertion difficile et risquant de faire rater la reprise.
-
Analyse de la réussite : En programmant la pause via le G-code dans PrusaSlicer, la machine s'arrête proprement et maintient le plateau à température. Comme on le voit sur les captures de l'impression en cours, la structure interne en nid d'abeille (infill) est parfaitement nette, permettant d'accueillir l’aimant sans déviation.
-
Rendu final : La pièce terminée présente une finition brillante et une grande solidité. Le décalage observé sur les exercices précédents a été maîtrisé ici grâce à une meilleure préparation du fichier de tranchage.
Conclusion :
Cet exercice est le plus complet de l'UE.La transition d'une pause "manuelle" à une pause "programmée" illustre parfaitement l'importance de la rigueur méthodologique dans le prototypage rapide. La pièce obtenue n'est plus un simple jouet en plastique, mais un oobjet aimanté fonctionnel.
No Comments