Bence Marton - Projets
Marque Page Chat - 09/01/2026
Coordonées
Bence Marton, martonbence9@gmail.com, Master Management de l'Innovation.
Introduction
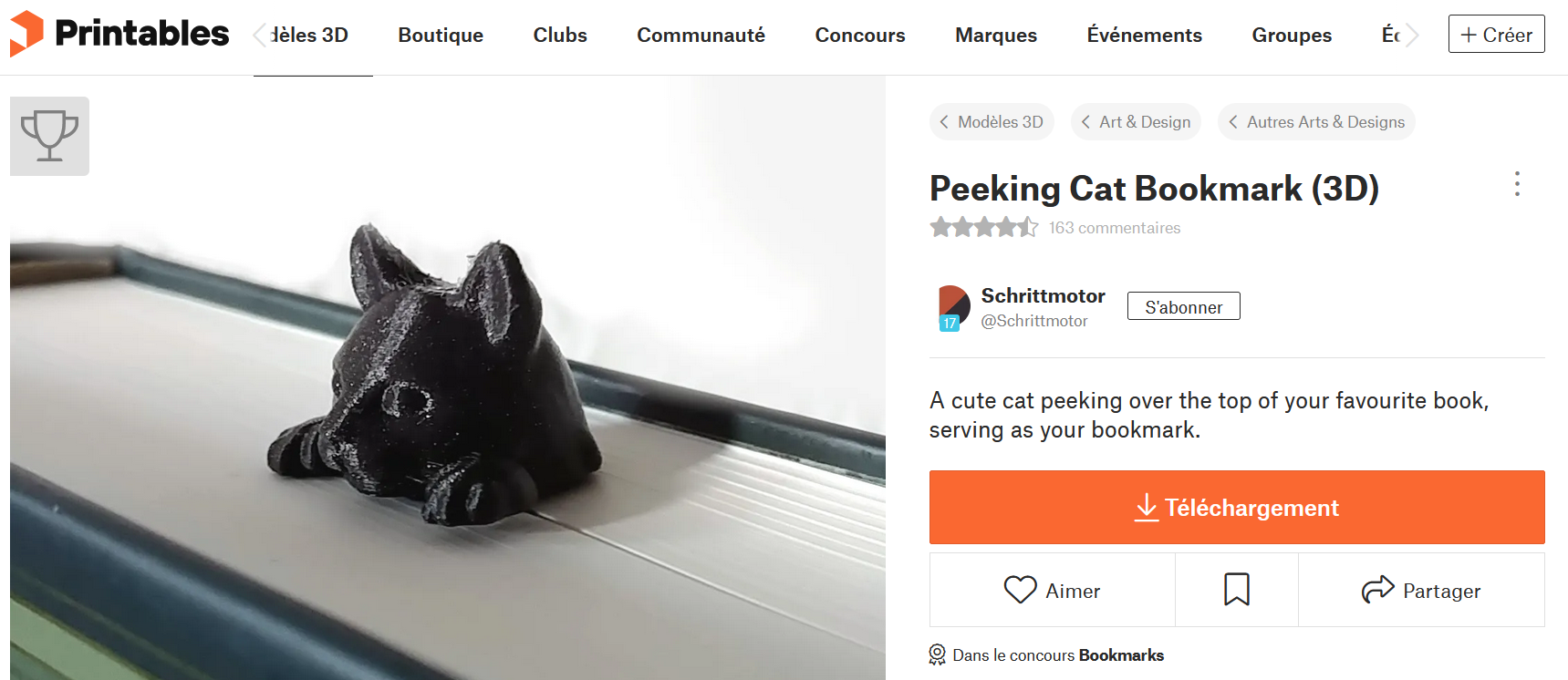
Fait le 09/01/2026. Afin de me familiariser avec les techniques d'impression 3D, je vais imprimer le marque page suivant:

Outils
Printables.com; PrusaSlicer 2.5.0;
Construction
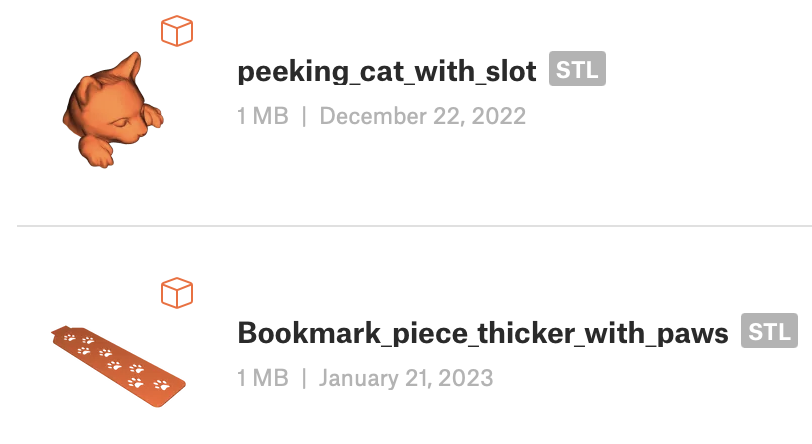
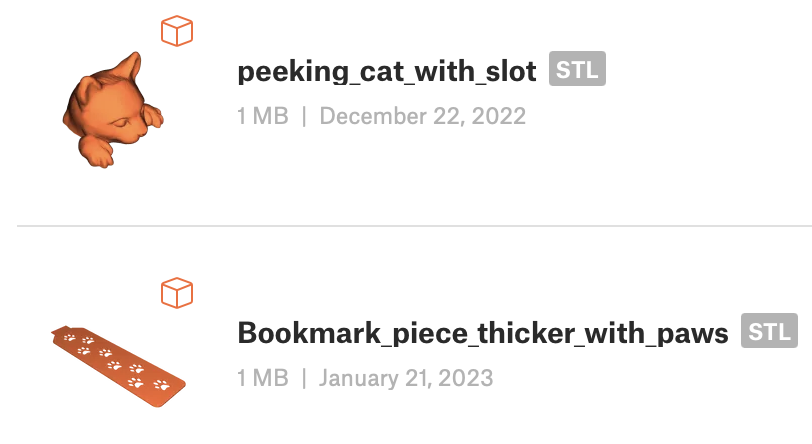
- J'ai trouvé un modéle sur le site printables.com que j'ai bien aimé (URL = https://www.printables.com/model/346623-peeking-cat-bookmark-3d).
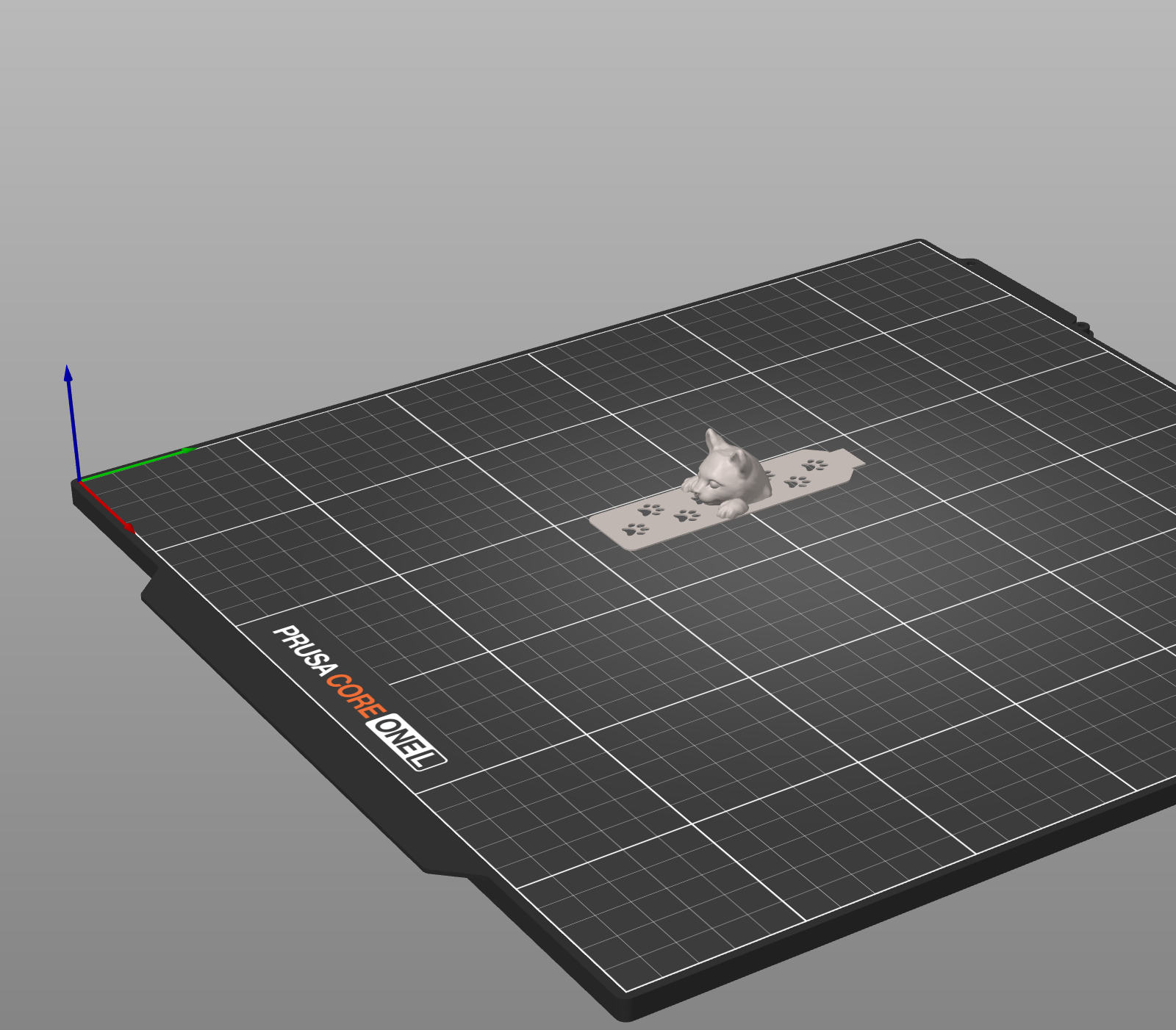
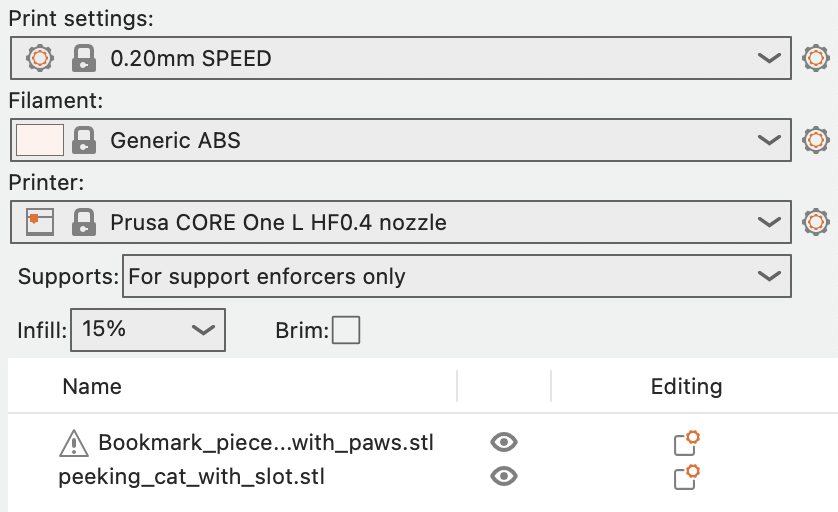
- J'ai ouvert les deux fichier avec PrusaSlicer 2.5.0:
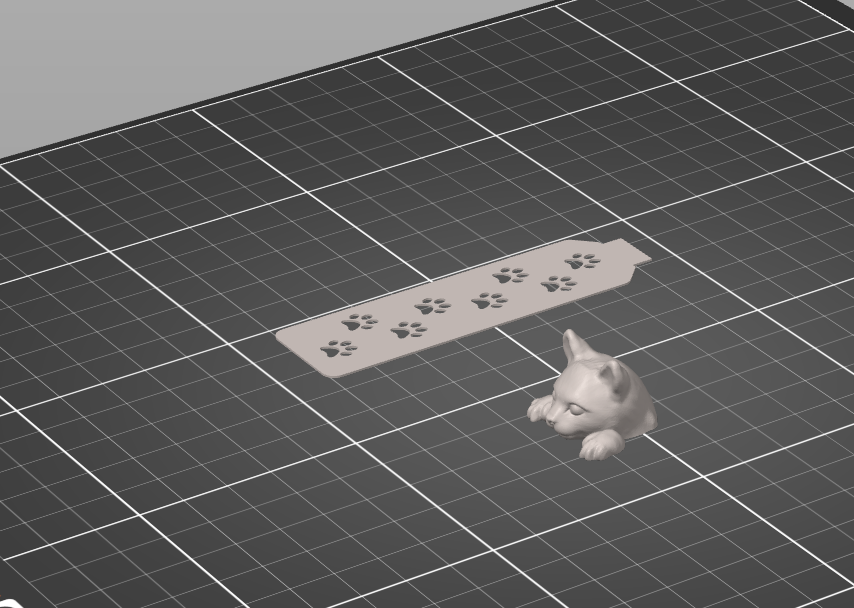
- J'ai séparé les deux objets en clickant et glissant l'objet:
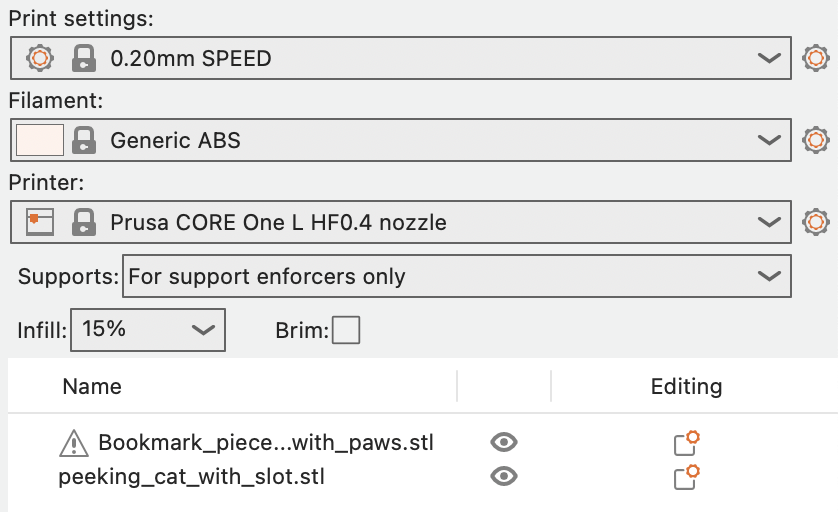
- Voici les paramètres de l'impression:
- J'ai exporté le G-Code sur une clé USB et je l'ai inséré dans une machine à l'impression 3D. J'ai choisi le nom de mon fichier sur la console de l'imprimante et l'ai démarré. Aprés 30 mins l'impression est terminé:
- Ensuite j'ai dû mettre les deux objets ensemble et les coller avec de la colle instantanée pour avoir l'objet final :

─────────────────────────────────────────────────────────
Microbot Fidget - 14/01/2026
Introduction
Fait le 09/01/2026. Un projet plus complexe, imprimer un fidget détachable:

Outils
Printables.com; PrusaSlicer 2.5.0;
Construction
- J'ai trouvé un modéle sur le site printables.com que j'ai bien aimé (URL = https://www.printables.com/model/234913-microbot-fidget)
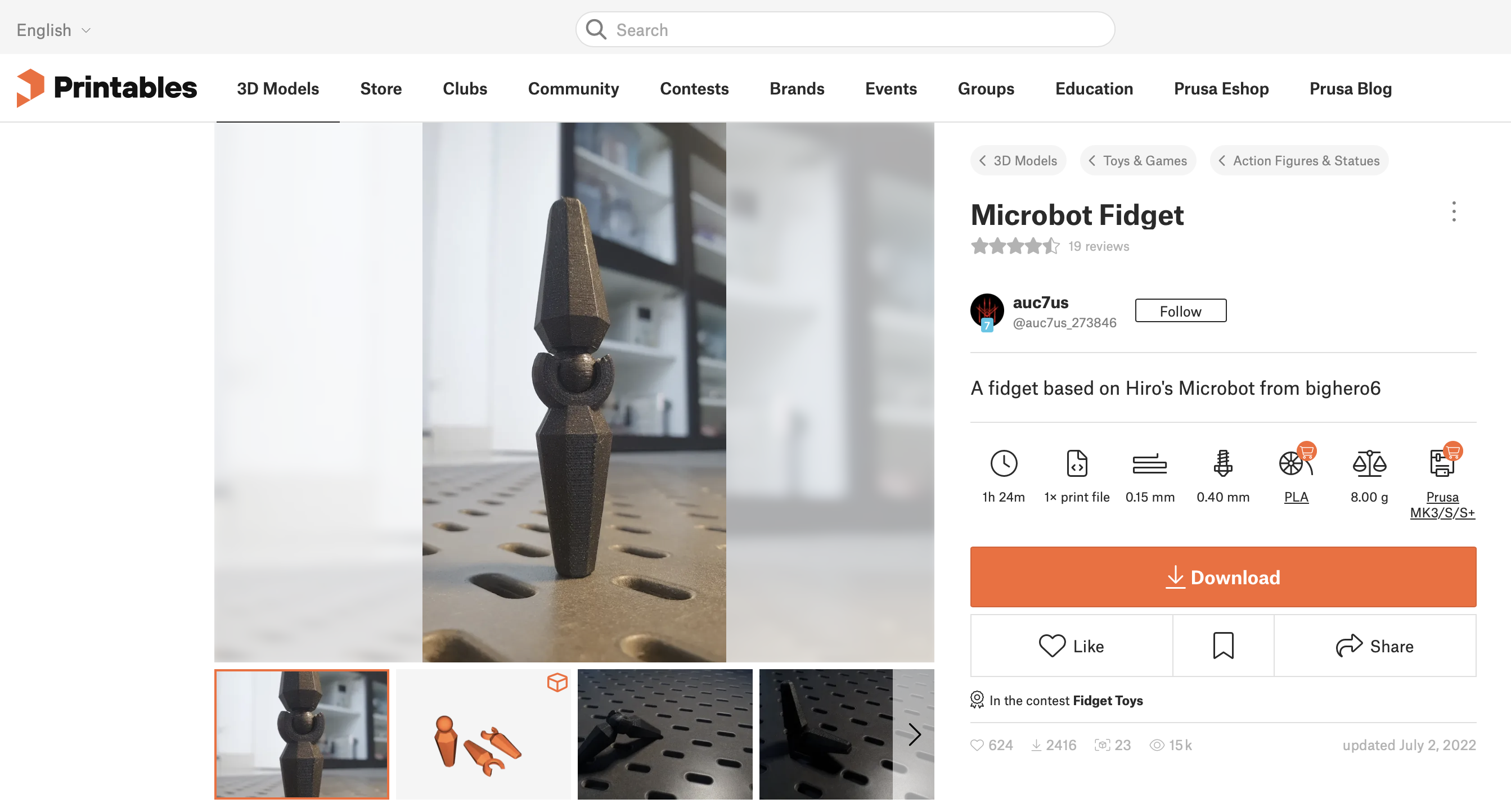
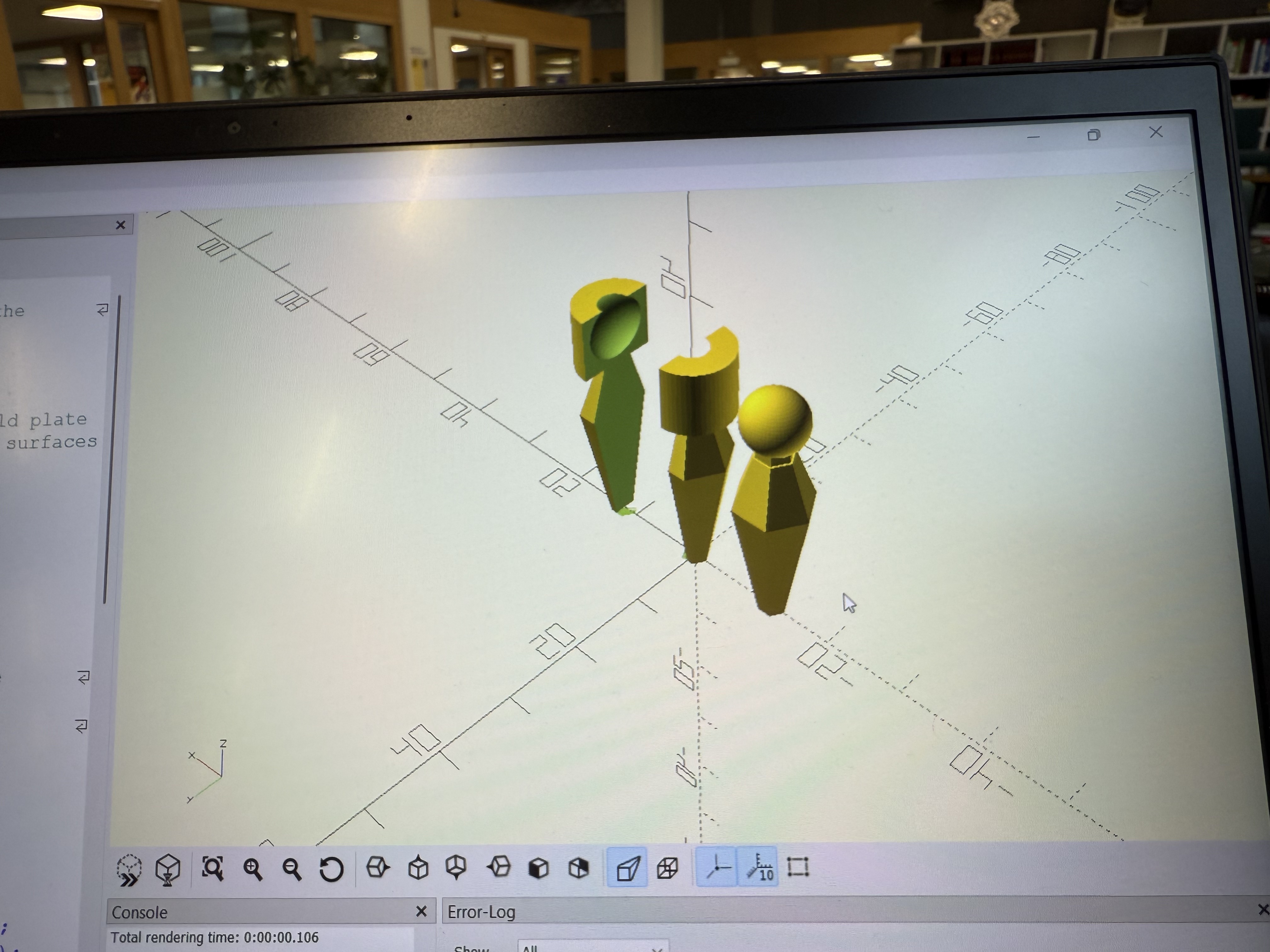
- J'ai ré-crée le modèle en openSCAD á l'aide de IA (j'ai fourni les fichiers STL, le G-code et une description).
J'ai dû affiner et corriger certaines parties du code pour qu'il fonctionne.
/* Microbot Fidget - Data-Driven Recreation
Calibrated from: microbot(2).stl & G-code metadata
*/
$fn = 64;
// --- Calibrated Parameters ---
base_width = 15.0; // Derived from G-code polygon
base_depth = 12.0;
top_width = 8.0;
limb_height = 20.0; // Individual segment height
ball_radius = 5.2; // Calibrated joint size
joint_clearance = 0.25; // Standard snap-fit tolerance
slit_width = 0.8; // Optimized for 0.4mm nozzle [cite: 530]
// --- Layout ---
translate([-15, 0, 0]) male_segment();
translate([15, 0, 0]) female_segment();
module body_geometry() {
// Tapered hexagonal/rounded body
hull() {
// Bottom Plate
linear_extrude(1)
offset(r=2) square([base_width-4, base_depth-4], center=true);
// Neck Plate
translate([0,0,limb_height])
linear_extrude(1)
offset(r=1) square([top_width-2, top_width-2], center=true);
}
}
module male_segment() {
union() {
body_geometry();
// Ball Stem
translate([0,0,limb_height])
cylinder(h=ball_radius, r1=top_width/2, r2=ball_radius-1);
// The Joint Ball
translate([0,0,limb_height + ball_radius + 1])
sphere(r=ball_radius);
}
}
module female_segment() {
difference() {
union() {
body_geometry();
// Socket Housing
translate([0,0,limb_height])
cylinder(h=ball_radius*2.2, r=ball_radius + 1.8);
}
// Sphere Cavity
translate([0,0,limb_height + ball_radius + 1])
sphere(r=ball_radius + joint_clearance);
// Entry Hole (allows snap-in)
translate([0,0,limb_height + ball_radius*2])
cylinder(h=ball_radius, r1=ball_radius-1, r2=ball_radius+1);
// Stress Relief Slits (for flexibility)
translate([0,0,limb_height + ball_radius + 1])
cube([slit_width, (ball_radius+2)*2.5, ball_radius*3], center=true);
translate([0,0,limb_height + ball_radius + 1])
cube([(ball_radius+2)*2.5, slit_width, ball_radius*3], center=true);
}
}- J'ai téléchargé les documents en .STL puis je les ai ouvert avec PrusaSlicer. J'ai allongé la pièce qui était debout puis j'ai sélectionné les paramètres suivantes:
- 0.20mm Speed
- Generic PLA
- Avec un densité de 50%
- Support: for support enforcers only
- J'ai exporté le G-Code et j'ai imprimé. J'ai obtenu les trois piéces suivant que j'ai collé ensembe à l'aide des peinces et du colle instantané.


─────────────────────────────────────────────────────────
Partie Arduino /w Kristina & Demir
--› Lien ici
No Comments