Romarin Hydrodynamique 25/26
Informations membres:
Maïssa Bouazza (L2 Mécanique Intensive)
Amina Khadir (L2 Mécanique Intensive)
Directeur de projet: Sinan Haliyo
Présentation:
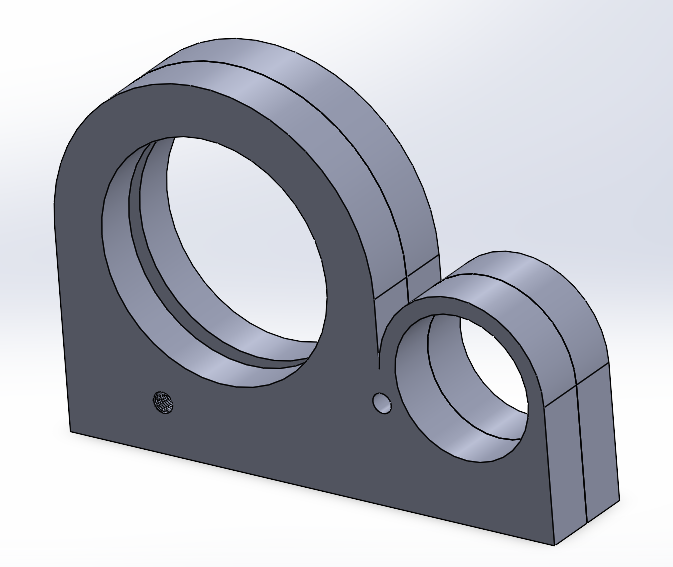
Dans le cadre de l'UE Romarin, notre projet se concentre sur la conception d'un ballast. Il s'agit dans le milieu marin d'une cavité que l'on remplie d'eau ou d'air, permettant de contrôler la profondeur du sous marin. Si le ballast est remplie d'eau, cela rajoute du poids et le sous marin coule. A l'inverse, si le ballast est remplie d'air, cela rajoute du volume au sous marin et il remontera. Avec le sous marin que nous avons réaliser dans la première partie, nous avons choisi une seringue de 500 mL qui jouera le rôle de ballast. Cependant, nous avions besoin de pièces pour fixer la seringue et le moteur et faire bouger le piston pour faire rentrer ou expulser l'air en surface.
Il fonctionne à l'aide d'un moteur à aquarium. Le but est de faire avancer ou reculer le piston à l'aide d'une tige filetée qui tournerait grâce au moteur. La tige tournante mais fixe dans son axe de rotation ferait avancer ou reculer sur son axe un écrou que l'on empêchera de tourner et que l'on reliera au piston à l'aide des pièces que nous devons créer. Cet écrou bloqué est ce qui va créer tout le mouvement de translation désiré. Cela est facilement démontrable en prenant une tige filetée que l'on fait tourner tout en bloquant un écrou dessus. L'écrou avance le long de la tige.
Impressions 3D:
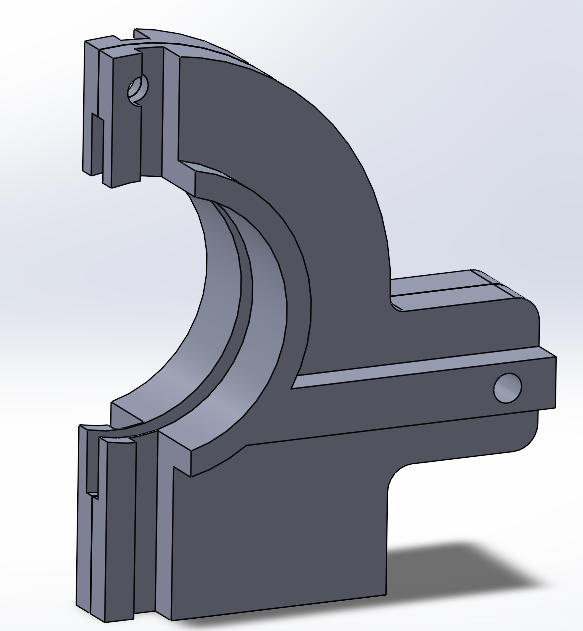
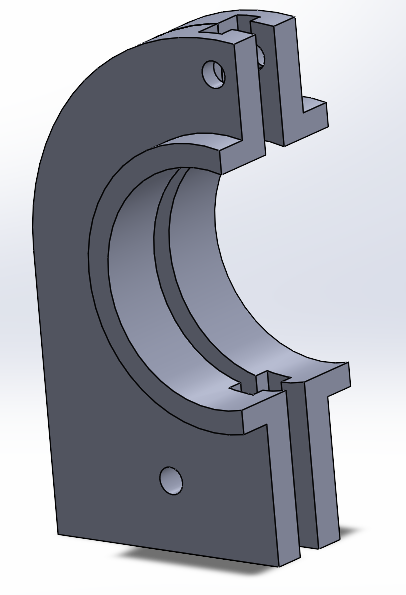
Nous avons utilisé SolidWorks pour modéliser nos pièces et les imprimer.
Le 30/03/26, nous avons lancé l'impression de plusieurs de nos pièces, mais en les testant, on s'est rendu compte que nous avions un problème de dimension et de solidité. Alors, on les a redessiner.
Le 03/04/2026 : Nous avons lancé l'impression de ces pièces.
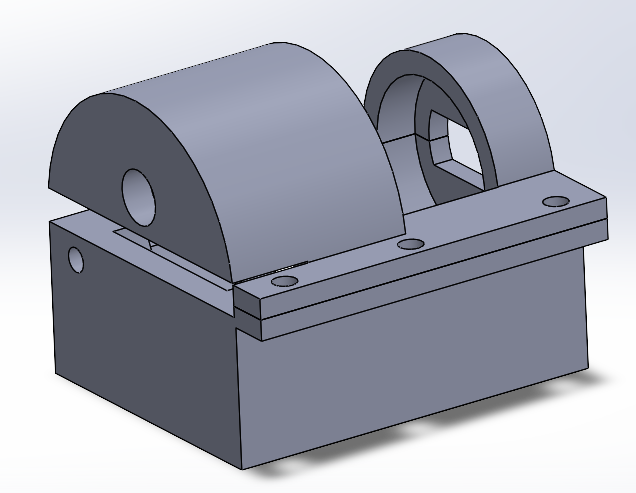
Le 15/04/2026: Nous avons imprimé les pièces restantes à notre châssis, il nous reste plus qu'à les assembler et faire les tests.
Cette dernière pièce est une coque de fixation pour le moteur. Pour éviter qu'il tourne dans son propre axe de rotation, on a décidé de créer une pièce qui sera fixée au châssis et bloquera le moteur.
No Comments