Projet d'Automatisation et régulation de la viscosité
UE MU5CI823-Optimisation, contrôle et digitalisation des procédés
Groupe 2
Noms et Prénoms:
DE LA TAILLE LOLAINVILLE Gregoire (gregoire.de_la_taille_lolainville@etu.sorbonne-université.fr) 21103148
PALAIN Ilies (ilies.palain@etu.sobonne-université.fr) 21400210
HOU Charles (charles.hou@etu.sorbonne-université.fr) 21400213
JIANG Alexandre (alexandre.jiang@etu.sorbonne-université.fr) 21113611
Introduction :
L'objectif de notre projet est de contrôler la concentration d'une solution aqueuse à partir de sa viscosité. Pour cela, nous utiliserons un agent visqueux afin de directement associer la viscosité du mélange à sa concentration en agent visqueux
Matériel utilisés:
Réactifs :
- Eau
- Grenadine
Composants:
- 1 carte Arduino (Carte Arduino UNO Rev 3)
- 4 pompes (LEX-WATER-PUMP2 Pompe miniature à eau 1,1 L/min)
- 1 moteur agitateur pour mélanger (Motoréducteur 37025GM-12130)
- 1 électrovannes (Electrovanne 12 V FDP360L)
- 5 Relais (Module de relais 5 V SRD-05VDC-SL-C)
- 1 capteur de niveau à ultrason (Capteur de détection ultrasons HC-SR04)
- 1 capteur de débit (Capteur de débit YFS401) : FT (Flow Transmitter)
- 1 BreadBoard
- 4 récipients
- 1 générateur
Avancement du projet:
16/10/2025: Lors de la semaine blanche, nous avons entamé une première séance de brainstorming qui nous servait de base préliminaire pour choisir le sujet de notre projet. Nous nous sommes ainsi porté sur un sujet portant sur la régulation du procédé d'une élaboration de biodiesel avec une analyse de sa pureté.
17/10/2025 : Après concertation avec notre tuteur de projet, M. Jérôme PULPYTEL, nous avons décider de modifier notre sujet, tout en gardant l'une des idée de base de l'ancien sujet qui est en rapport avec la viscosité. C'est pour cela que nous sommes donc partis sur l'automatisation de la régulation de la viscosité par une méthode in-situ.
17/10/2025 jusqu'au 28/10/2025 : Réalisation du schéma de notre projet et la préparation de la liste de matériel nécessaire à notre projet.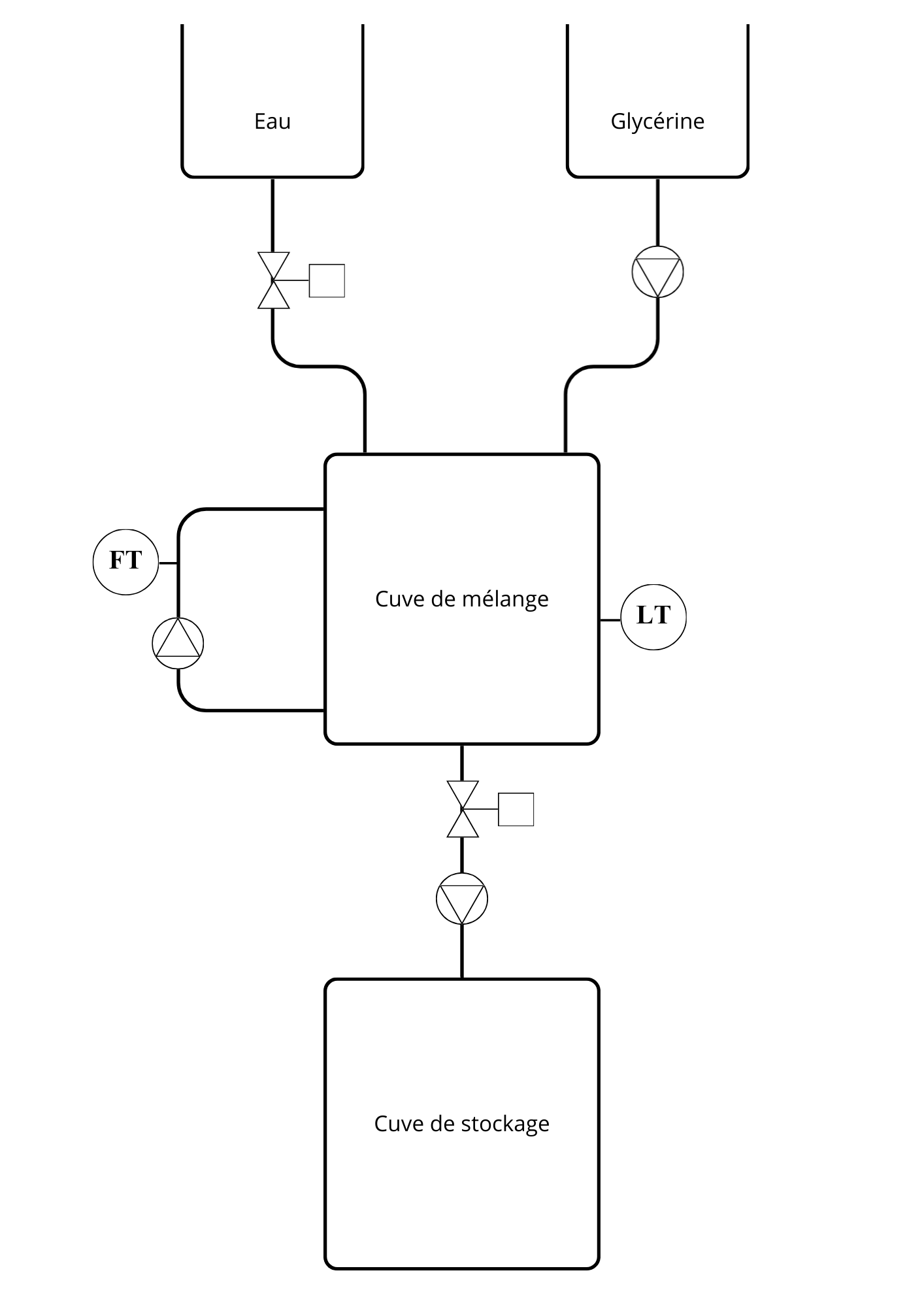
Figure 1 : P&ID de départ
17/11/2025 : Nous allons chercher les matériaux de la liste pour pouvoir ainsi commencer le projet.
19/11/2025: Sciure pour créer les supports pour les deux réservoir des réactifs de départ.

Figure 2 : Support en bois après modification
24/11/2025 : Nous débutons le montage. Pour cela, on perce des trous dans la plaque en bois pour permettre le maintien des équipements. De plus, nous perçons les récipients pour permettre l'insertion des tuyaux. Nous installons ensuite les premiers éléments qui sont les récipients, une pompe, une électrovanne et un capteur.
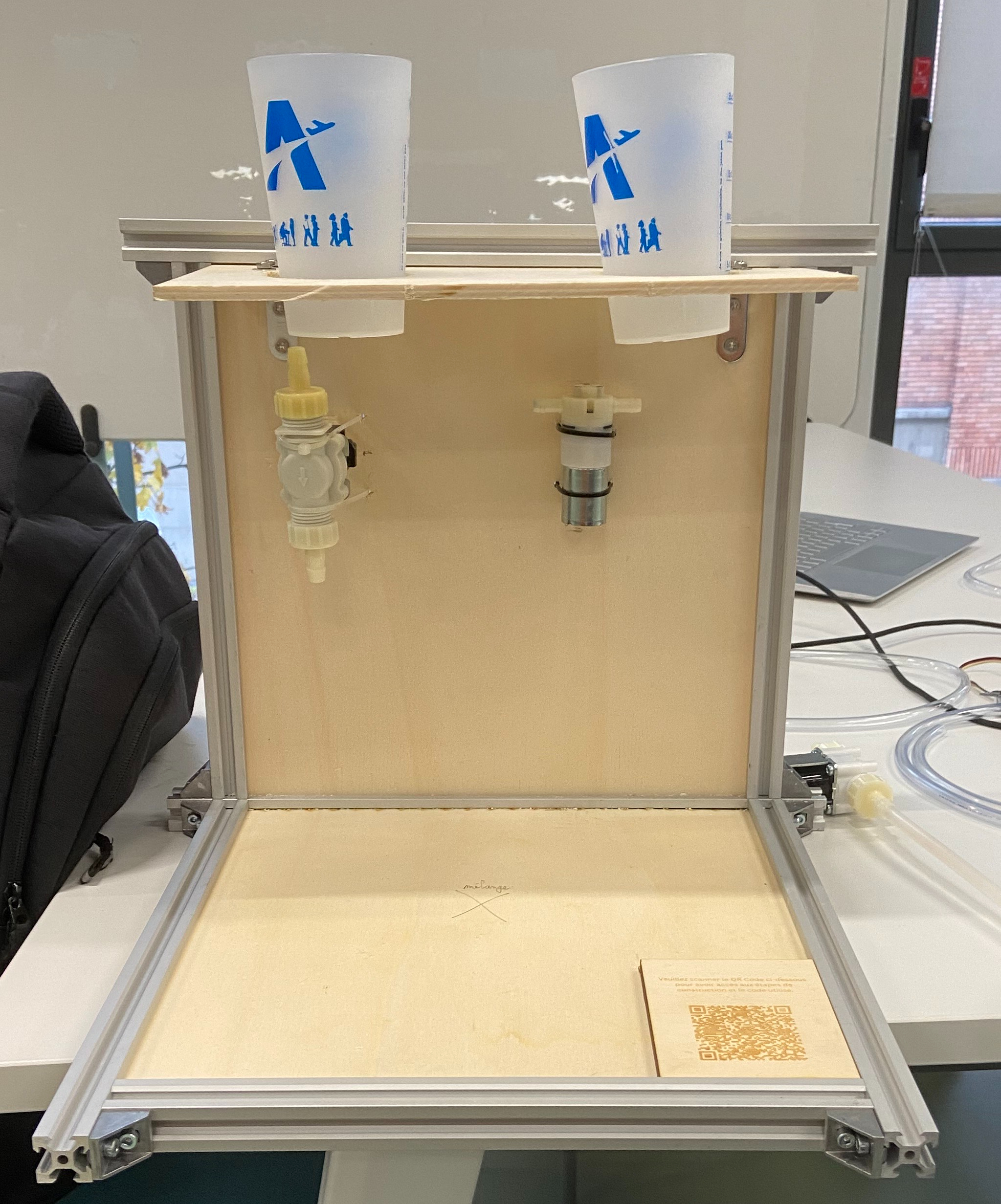
Figure 3 : Assemblage des premiers éléments du projet
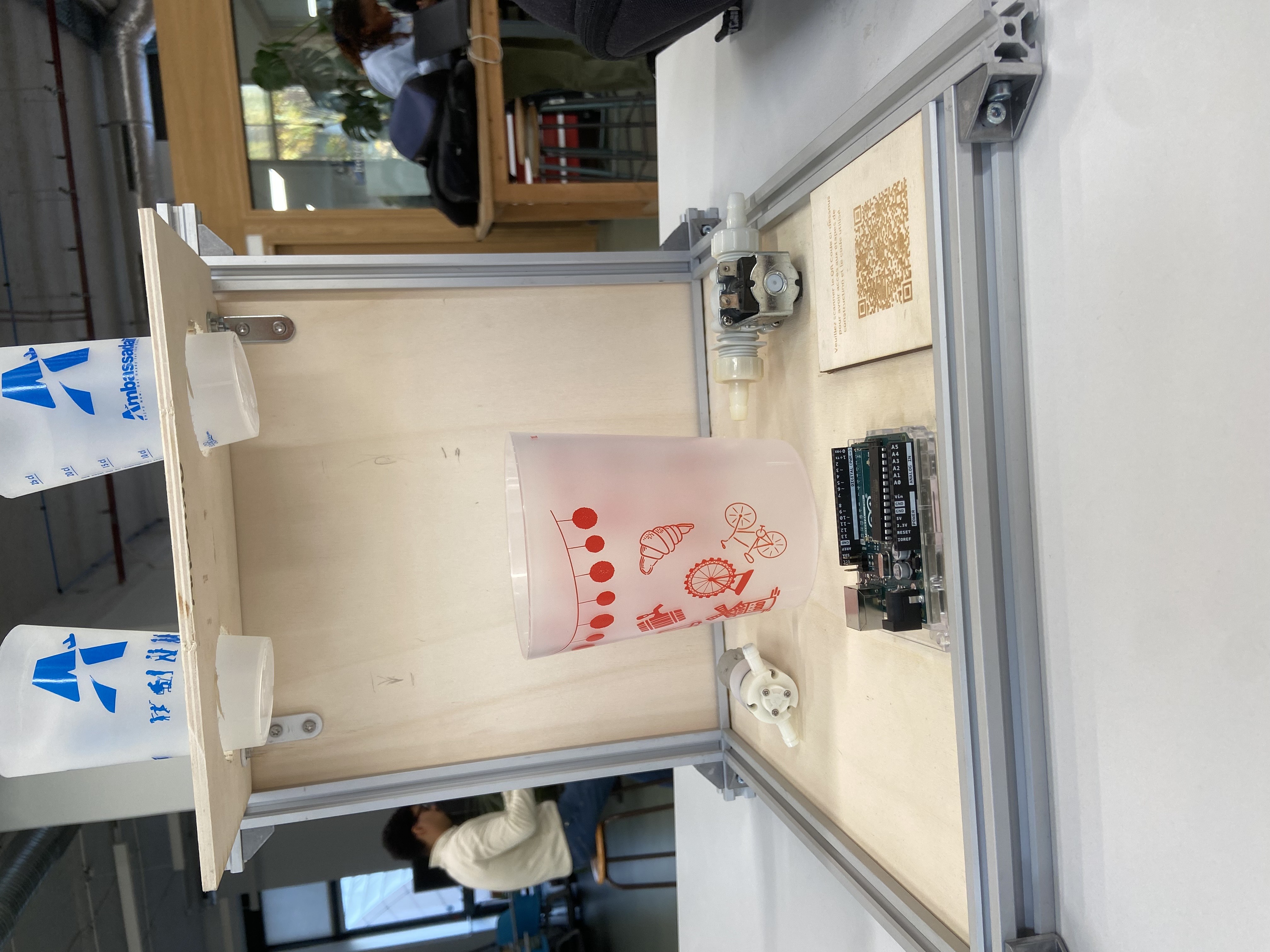
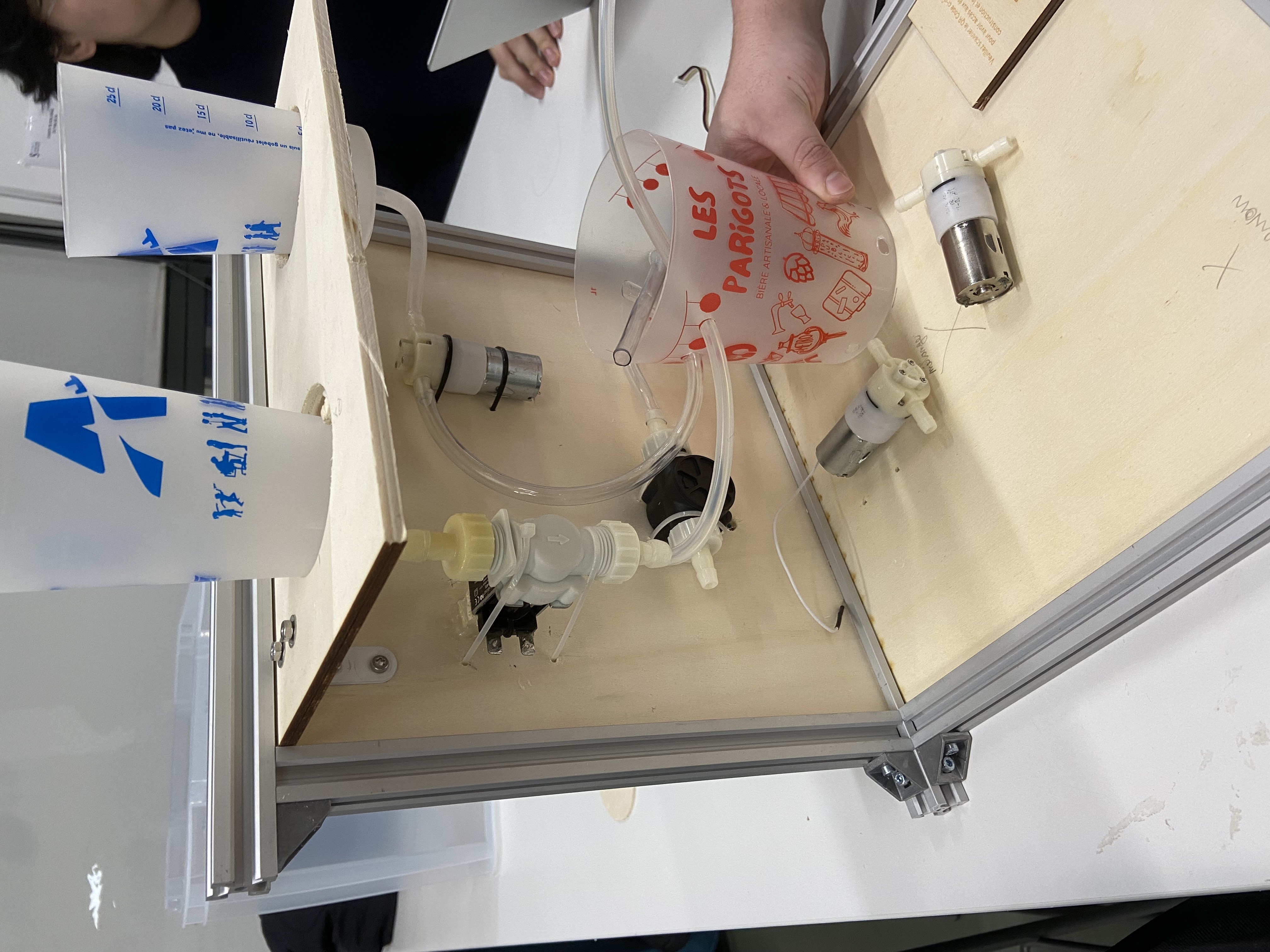
Figure 4 : Placement des éléments sous différents angles
26/11/2025 : 1er essai de modélisation du montage électrique sur TinkerCad. Modélisation 3D de l'hélice et de la tige à rattacher au moteur pour nous permettre de mélanger nos liquide. Création d'un support pour le moteur.
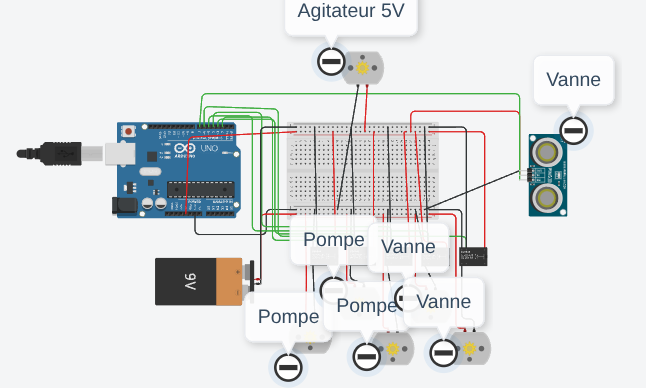
Figure 5 : 1er essai de modélisation sur TinkerCad
27/11/2025 : Après un premier envoi de notre essai de modélisation, notre tuteur nous explique qu'il manque des composants sur notre modèle TinkerCad et le code est incomplet. Suite à cela, nous nous décidons de modifier notre envoi de modélisation. En parallèle à cela, nous imprimons en 3D les pales de notre agitateur. Puis nous avons fait des trous dans nos planches pour pouvoir installer les derniers pièces manquantes sur le support.

Figure 6 : Pales imprimées en 3D pour l'agitation
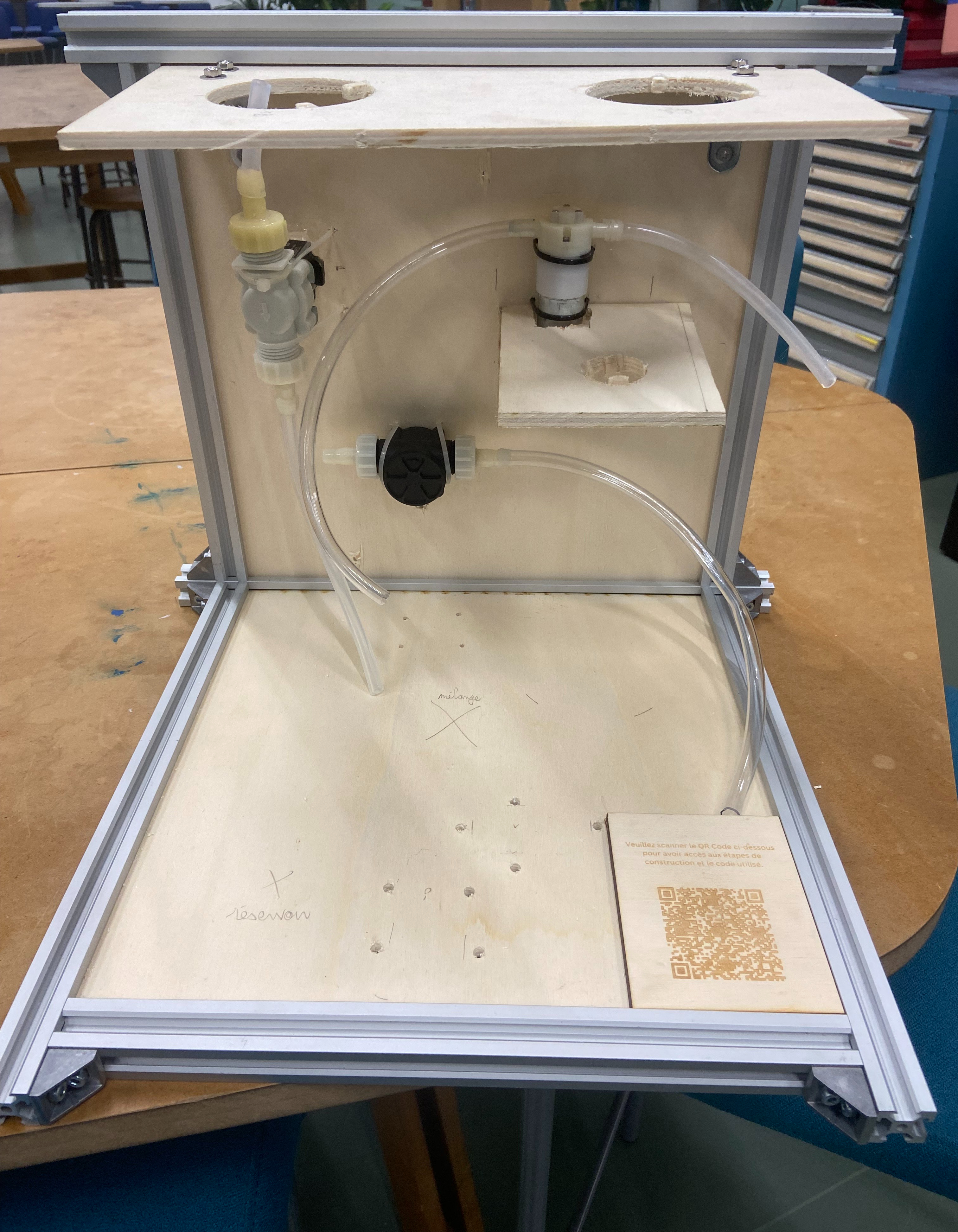
Figure 7 : Support comportant tout les emplacements finaux
28/11/2025 : Nous commençons les branchement des modules relais à l'Arduino. Tous les équipements ont d'abord été testé avec le code correspond afin de vérifier leur bon fonctionnement. Ils ont ensuite été placés sur le support avec les différents récipients et les branchements associés.
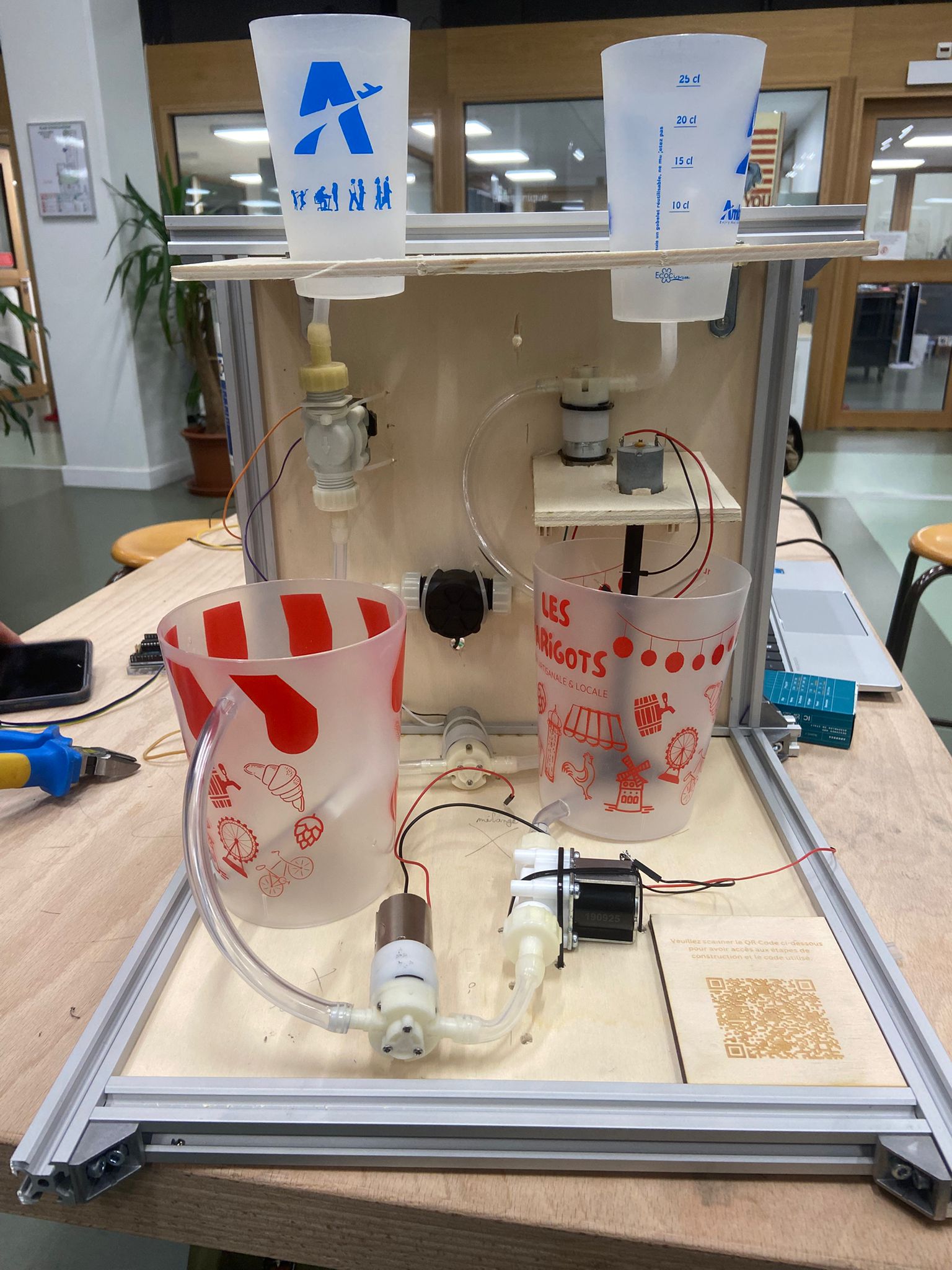
Figure 8a : Support comportant les équipements, récipients et branchements (face avant)
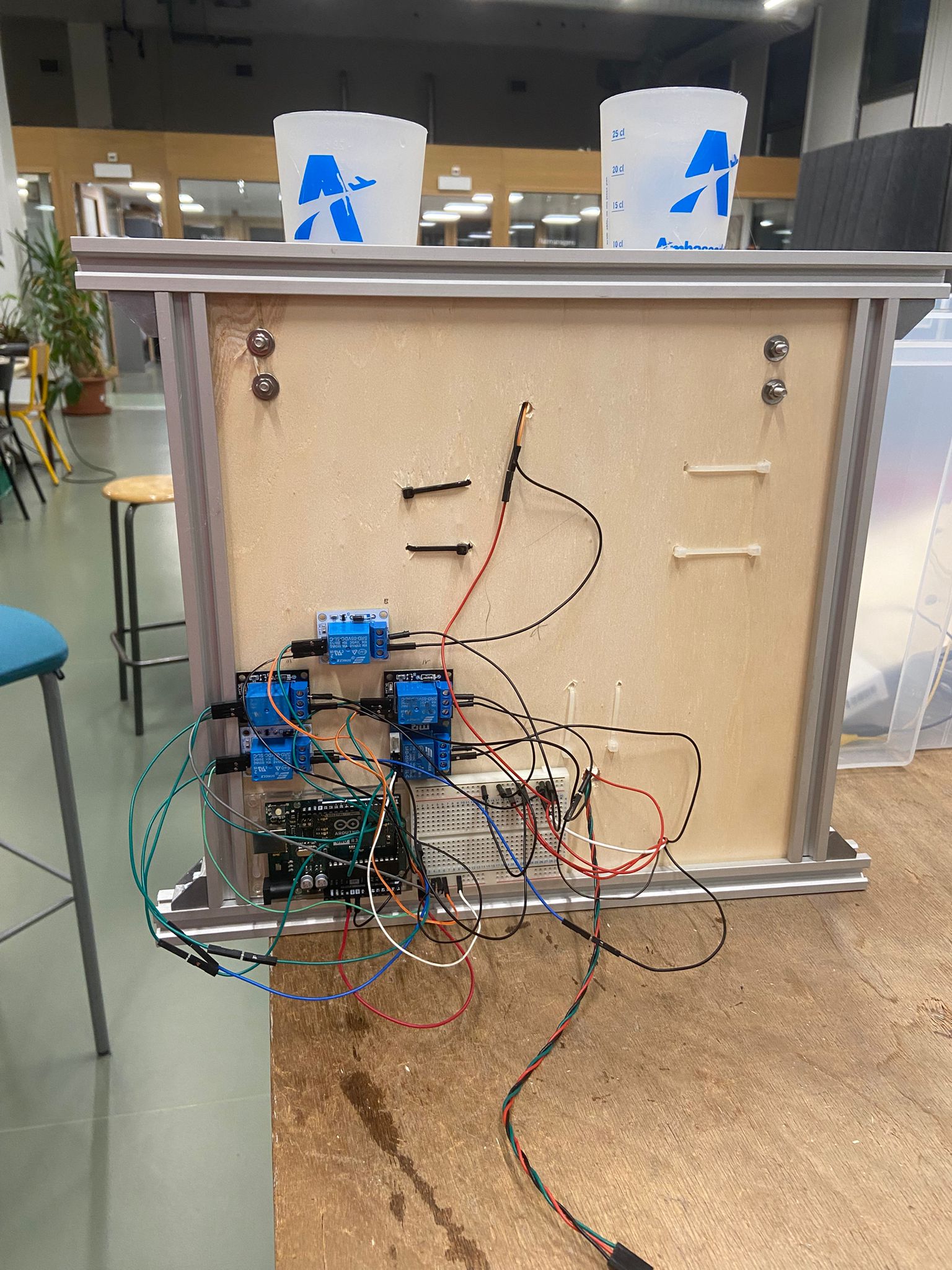
Figure 8b : Support comportant les équipements, récipients et branchements (face avant)
Du fait d'un débit de sortie de l'eau beaucoup trop faible à cause de la vanne associée, il a été décidé de la remplacer par une pompe. Voici le nouveau P&ID du projet :
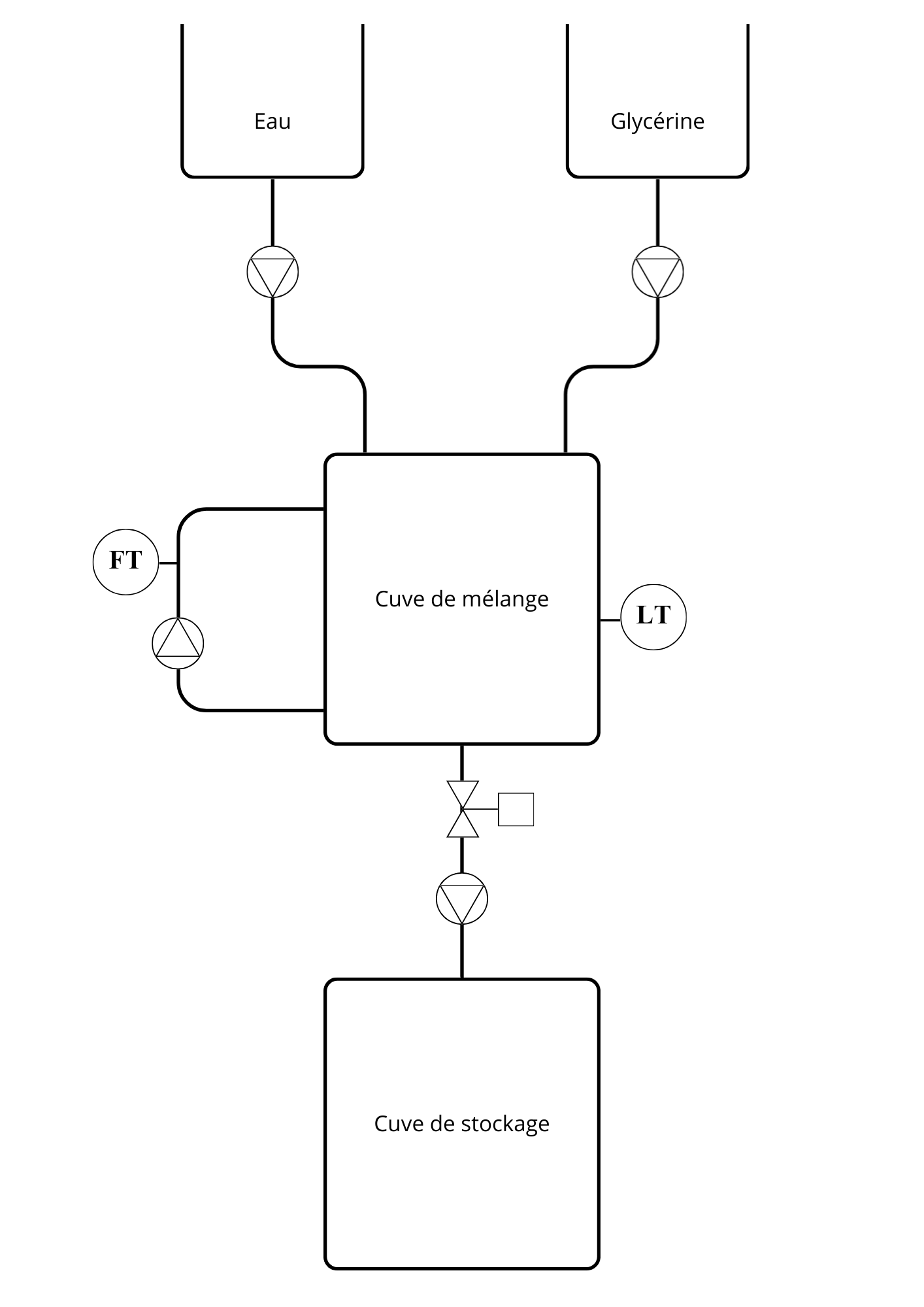
Figure 9 : Nouveau P&ID de l'installation
26/01/2025 : Il n'a pas été possible d'obtenir de la glycérine pour le projet. Ainsi, la glycérine est remplacée par un autre liquide visqueux, la grenadine, car disponible à bas coût et en grande quantité, la viscosité a été estimé à environ 1500 CP.
On obtient la courbe d'étalonnage suivante, grâce à des différentes mesures d'eau pure, de grenadine pure, et de mélange 50/50, :
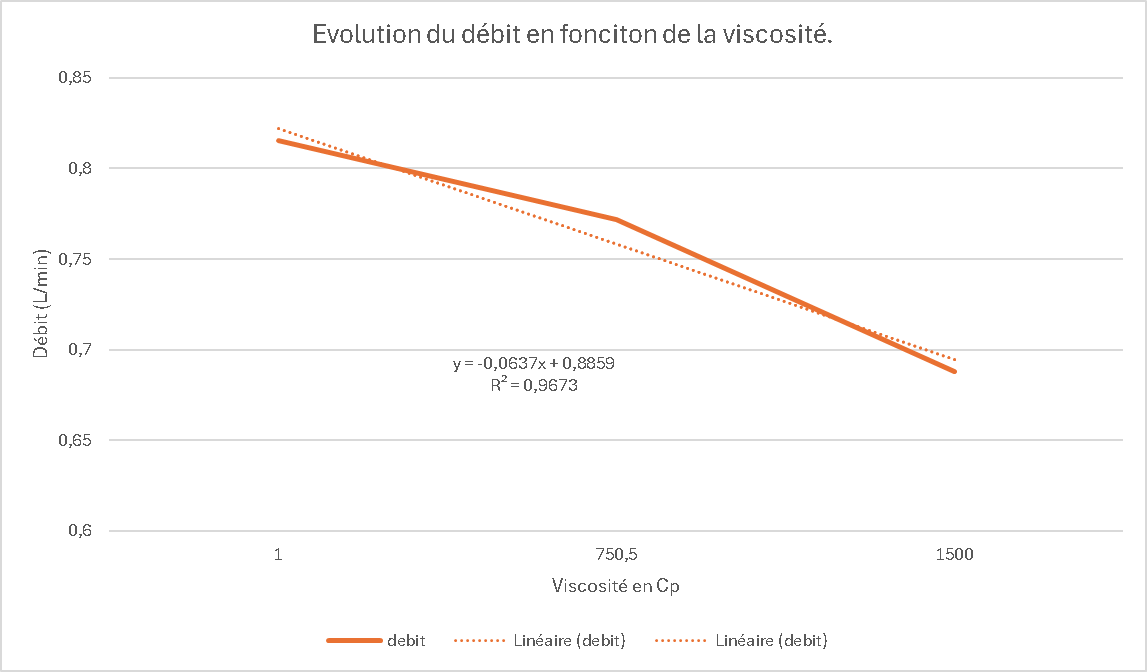
Figure 10 : Graphique montrant l'évolution du débit en fonction de la viscosité
Nous avons également fait le code Arduino en s'aidant de l'IA claude.ai :
|
// MACHINE DE REGULATION DE VISCOSITE // Valeur de viscosité cible en centipoise // pin occupés // Paramètres // Variable mesurées void setup() { void loop() { void regulateViscosity() { float measureFlow() { void transferMixture() { // Mesure de la hauteur du mélange, arrêt si < 6 cm void checkLevel() {
|
Ce programme Arduino contrôle une machine automatique capable de réguler la viscosité d'un mélange liquide entre 1 et 1500 centipoise (cP). Le système mélange de l'eau et de la grenadine pour atteindre une viscosité cible définie par l'utilisateur.
Fonctionnement du code
1. Étalonnage
Le système s'appuie sur un étalonnage réalisé avec trois points de mesure :
-
Eau pure : 1 cP → débit de 0.815 L/min
-
Mélange 50/50 : 750 cP → débit de 0.772 L/min
-
Grenadine pure : 1500 cP → débit de 0.688 L/min
Ces mesures établissent une relation entre le débit mesuré et la viscosité du liquide : plus le liquide est visqueux, plus le débit est faible.
2. Processus de régulation
Étape 1: Initialisation
-
Injection initiale de 5 secondes d'eau pour créer une base de travail
-
Pause de 2 secondes pour stabilisation
Étape 2: Cycle de mesure et ajustement
-
Mesure du débit : La pompe de circuit (pin 4) fait circuler le liquide pendant 10 secondes à travers le débitmètre (pin 7). Le système prend 10 mesures d'une seconde chacune et calcule la moyenne.
-
Calcul de la viscosité : En utilisant l'interpolation linéaire sur les points d'étalonnage, le programme convertit le débit mesuré en valeur de viscosité.
-
Comparaison avec la cible : Le système calcule l'écart entre le débit mesuré et le débit cible (correspondant à la viscosité désirée).
-
Ajustement :
-
Si le débit est trop élevé (liquide trop fluide) → ajout de grenadine pendant 3 secondes (pin 3)
-
Si le débit est trop faible (liquide trop visqueux) → ajout d'eau pendant 3 secondes (pin 2)
-
-
Répétition : Le cycle se répète jusqu'à ce que l'écart soit inférieur à 10% du débit cible.
-
La première itération sert uniquement à mesurer l'état initial, aucun ajustement n'est effectué.
Étape 3: Transfert Une fois la viscosité cible atteinte, le mélange est transféré en activant simultanément la pompe de transfert (pin 5) et la vanne (pin 6) pendant 30 secondes.
Sécurité: Détection de débordement
Un capteur ultrason (pin 8) surveille le niveau du liquide toutes les 5 secondes. Si la distance mesurée est inférieure à 6 cm (risque de débordement), le système :
-
Arrête immédiatement toutes les pompes
-
Effectue une vidange d'urgence (30 secondes)
-
Affiche un message d'erreur
-
Stoppe définitivement le programme
Configuration matérielle
Pins utilisées
-
Pin 2 : Pompe d'injection d'eau
-
Pin 3 : Pompe d'injection de grenadine
-
Pin 4 : Pompe du boucle de mesure
-
Pin 5 : Pompe de vidange
-
Pin 6 : Vanne de vidange
-
Pin 7 : Capteur de débit (débitmètre SEN0217)
-
Pin 8 : Capteur de niveau ultrason
Limites et recommandations
Zone de précision réduite (> 750 cP) Au-delà de 750 cP, la variation de débit devient très faible (seulement 0.084 L/min entre 750 et 1500 cP). Le système devient donc plus sensible aux fluctuations et moins précis. Pour ces viscosités élevées, il est recommandé d'augmenter la tolérance à 15-20%.
Bibliothèque requise: Le programme nécessite la bibliothèque Ultrasonic.h pour le capteur de niveau.
Conclusion :
Ce projet portant sur la conception et la mise en place d’un système d''automatisation et de régulation de la viscosité. Le projet nous a permis de mettre en pratique la théorie acquise académiquement à une réalisation concrète, en intégrant des éléments mécaniques, hydrauliques et électroniques contrôlées par Arduino.
Avec plus de temps, nous aurions pu améliorer la robustesse du montage, de meilleurs attaches, réaliser un câble management ainsi que l’optimisation du code pour rendre l'automatisation plus stable et plus précise surtout à haute viscosité. Une meilleure droite d'étalonnage et un meilleur débitmètre aurait également permis d’augmenter la fiabilité des mesures.
Ce projet nous a surtout appris à travailler en équipe, à résoudre des problèmes techniques imprévus (fuites, erreurs de câblage, difficultés de programmation) et à adapter notre conception en cours de route. Nous avons retenu l’importance des tests progressifs, de la communication entre les membres du groupe et du lien entre théorie et pratique dans la réalisation d’un procédé expérimental.
Cela nous a permis de développer des compétences clés, comme le travail d’équipe, la résolution de problèmes techniques (fuites, câblage, programmation) et l’adaptabilité face aux imprévus. Il a aussi souligné l’importance des tests réguliers, d’une communication efficace et de l’équilibre entre théorie et pratique pour mener à bien une expérience.
No Comments