doigt robotique pour Projet fablab, UM4RBM20
Membres : Xiaoyu Sun ; Franciszek Guzek
avant propos
Ce projet s’inspire des travaux présentés dans l’article scientifique Integrated linkage-driven dexterous anthropomorphic robotic hand https://www.nature.com/articles/s41467-021-27261-0
Introduction:
Ce projet nous permet de maîtriser différentes techniques de fabrication, d'anticiper les interactions entre des matériaux différents et gérer une chaîne de conception allant de la CAO jusqu'au montage final.Nous nous concentrons sur la conception et la realisation d’un doigt robotique inspiré de cette approche. L’objectif est de proposer un mécanisme reproductible en FabLab. Nous objectif sera de proposer un mécanisme d'un doigt en FabLab, combinant :
- une structure simple à fabriquer, reliant différentes techniques de fabrication
- une transmission mécanique efficace avec des matériaux différant ( notamment bois et pla )
Ce travail sert à nous familiariser et a implémenter les technique de conceptions au sein du fablab.
1ere Impression 3d :
Notre première approche a été de disposer toutes les pièces sur le même plateau:
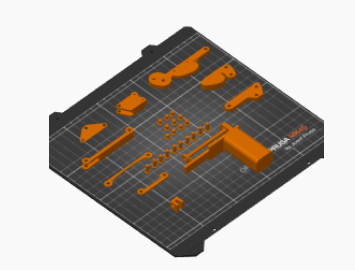
Certaines petites pièces se sont rapidement décollées du plateau, probablement à cause d’une surface d’adhérence insuffisante, tandis que les pièces plus grandes ont commencé à se déformer légèrement (warping). Avec un temps d’impression long, ces défauts se sont amplifiés et une pièce décollée a fini par être déplacée par la buse se collant à une autre pièce, perturbant créant un problème en chaine.
Cette première tentative nous a montré qu’il est préférable de séparer les impressions selon la taille et la fonction des pièces afin d’améliorer la fiabilité et la qualité finale. De plus nous avons ajouté des supports organiques faciles à enlever que les ponts suicides et donnant un meilleur résultat (Moins de contact avec les pièces ) pour les parties nécessitant des supports ainsi que des radeaux pour chaque pièces pour éviter les décollements. Car nous allions diviser l'impression en plusieurs plateaux, nous avons jugé utile d'aggrandir la taille des pièces de 150% directement sur prusa slicer.
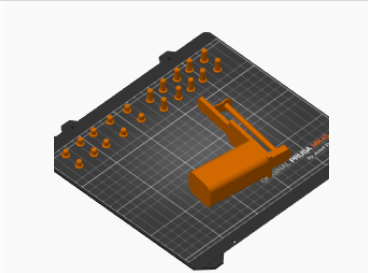
2eme impression 3d ( réussie):
nos plateaux utilisés

nos résultats d'impression (les pieces ont étés imprimées plusieurs fois en cas de mauvaise manipulation et de casse)
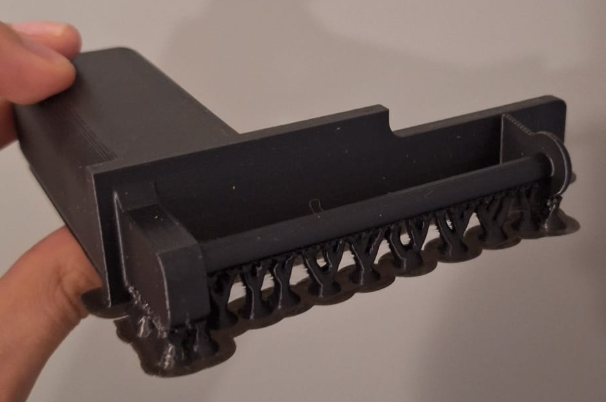
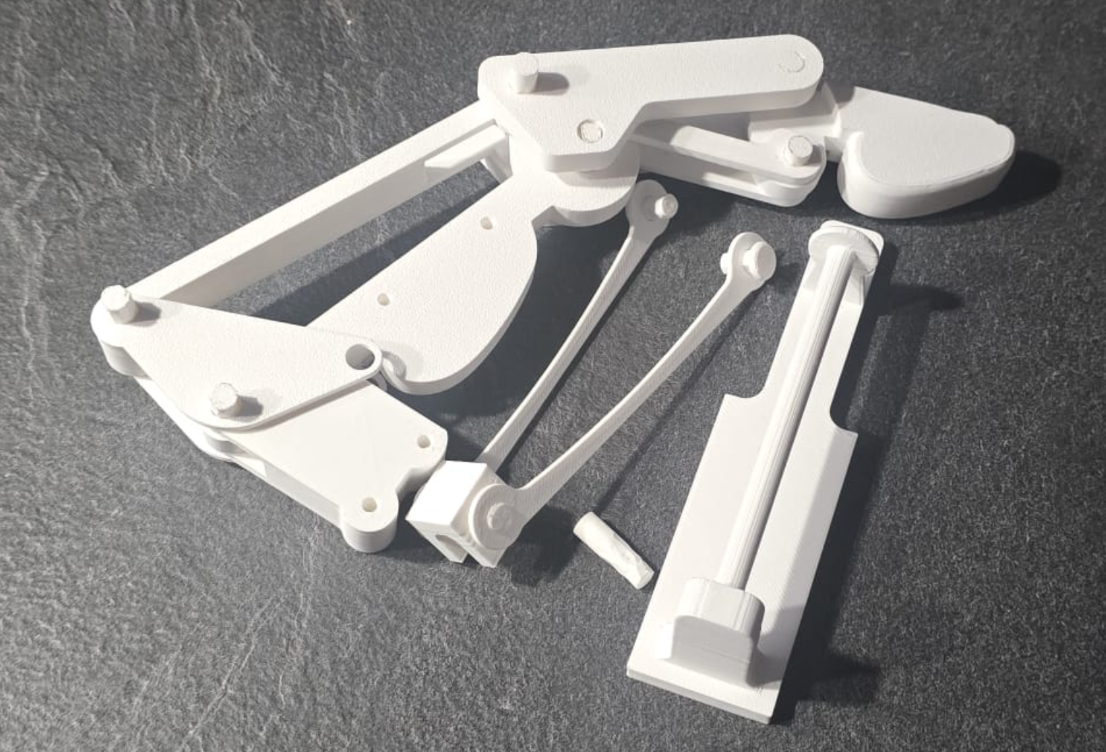
Ces deux impressions se sont bien déroulées et on donnés des résultats satisfaisants, à noter qu'on pourrait ajouter une option de ponçage pour avoir une surface plus fluide, nous pouvons aussi réaliser un post traitement tel que de la lubrification du rail afin d'améliorer le glissement ( nous le ferons si necessaire avant la présentation).
Découpe LASER
Afin d’évaluer les interactions entre des pièces imprimées en PLA et des éléments en bois, nous avons choisi de réaliser certaines jointures du doigt robotisé par découpe laser. Cette approche permet de produire rapidement des pièces en bois avec une bonne précision et des surfaces plus lisses que l’impression 3D, notamment pour les zones de contact et de glissement. En comparant ces assemblages hybrides (PLA + bois) avec des versions entièrement imprimées. Nous allons transformer les pieces les plus adaptés de solidworks ai format svg.
No Comments