Projet ROB3: Rami, Yannis, Vasilis
THE SCARA-B
Dossier de Préconception
Informations
Membres
| Nom Prénom | |
| TOBBAL Yannis | tobbalya@gmail.com |
| ARIDI Rami | rami.aridi@etu.sorbonne-universite.fr |
| SKARLEAS Vasileios | vasileios.skarleas@etu.sorbonne-universite.fr |
Cursus
Polytech 3eme année | Spécialité: Robotique
Délais
Début: 14/02/24 | Fin: 23/05/24
But, objectifs et contexte
But
Le but est de créer un robot capable de dessiner différentes formes sur une feuille de papier. Il doit pouvoir réaliser des formes préprogrammée ainsi qu'être contrôlé manuellement.
Objectifs
Le robot est fixé sur un support carré horizontal comportant une zone de dessin de 10*10 cm. Il y a 2 exercice qu'il doit réussir. En outre, le robot faitfaut être capable de repondre au cahier des charges disponible ici.
Exercice 1
Dessiner des formes prédéfinies
Le robot doit être capable de réaliser en 10 +- 0.2 secondes:
-Une ligne droite de 5cm
-Une ligne droite de 5cm en pointillés
-Un cercle de 2.5cm de rayon
-Un cercle de 2.5cm de rayon en pointillés
Exercice 2
Permettre à un utilisateur de dessiner
L'utilisateur doit être capable d'utiliser le robot pour dessiner la forme qu'il veut sur la zone de dessin. Le robot est contrôlé par un joystick qui doit donc être doté des fonctions utilisés dans l'exercice 1 (Déplacement, relever le stylo etc...)
Besoins
Il faut donc créer un robot qui:
- Maintienne un effecteur (le stylo) afin de dessiner
- Se déplace:
- Dans un plan horizontal: Créer les formes
- Verticalement: Dessiner ou non, pour les pointillés
- Enregistre des formes prédéfinies
- Soit capable d'être contrôlé précisément par le joystick
Matériel
CopiéLes dumoyens sujetqu'on a à notre disposition sont les suivantes:
- Un crayon
- Interface de commande :
- Une carte arduino UNO avec câble USB-B;
- Un joystick:
- Une platine de protoypage;
- Alimentation régulée 5V ;
- Câbles, LEDs, boutons poussoirs, résistances.
- Motorisation :
- Deux servomoteurs HS422 180°;
- Un servomoteur Emax ES08A 180°.
- Mécanique :
- Matière PLA pour impression 3D;
- Feuilles medium : 3mm et 6mm d'épaisseur;
- Vis et écrous : M2, M2.5, M3, M4.
- Roulements et axes de diamètre 4mm.
- Informatique
- Ressources CAO.zip contient les fichiers Solidworks pour les deux modèles de servomoteurs
- datasheets.zip contient les documentations de quelques-uns des composants fourni
Machines utilisées
Utilisation de l'impression 3D pour les pièces principales et éventuellement de la technologie de découpe laser pour la surface d'écriture de notre robot.
BrainstormingDiagramme de GANTT
Il y a un lien interactif qui est mis à jour à chaque modification via https://airtable.com/appVydj1BDLSFj432/shrm5Cjk0diMBPmgL


Nota bene
Ce diagramme de GANTT est donnée à titre indicatif
Project FabLab ROB3 Tasks (GANTT).pdf
Étape 1: Brainstorming, idées de réalisation et analyse des risques
Durant notre brainstorming: nous eûmes 5 idées que nous avons ultimement rejetées:

1: Photo de notre tableau (Tout- estjuste enpour désordre)demonstration. Explications sont disponibles ci-dessous
Idée 1 - Robot de roues |
|
Principe: Un robot sur deux roues motorisé
Avantages:
Inconvenients:
Idée 2 - Robot XY (cartésien)
|
Un système similaire au fonctionnement d'une imprimante 3D:
Croquis:
Avantages:
Inconvenients: |
de bielle-manivelle peut être plus lourd qu'un système à roues motorisées, ce qui peut affecter la performance du robot.
Idée 3 - Scissors mecanism |
|
Principe: Inspirés du "Scissors mechanism", on voudrait attacher deux servomoteurs à la base du mécanisme et un système de commande d'actionneur au point "STYLO". Cette solution présente des avantages telles que : Croquis:
Avantages:
Inconvenients:
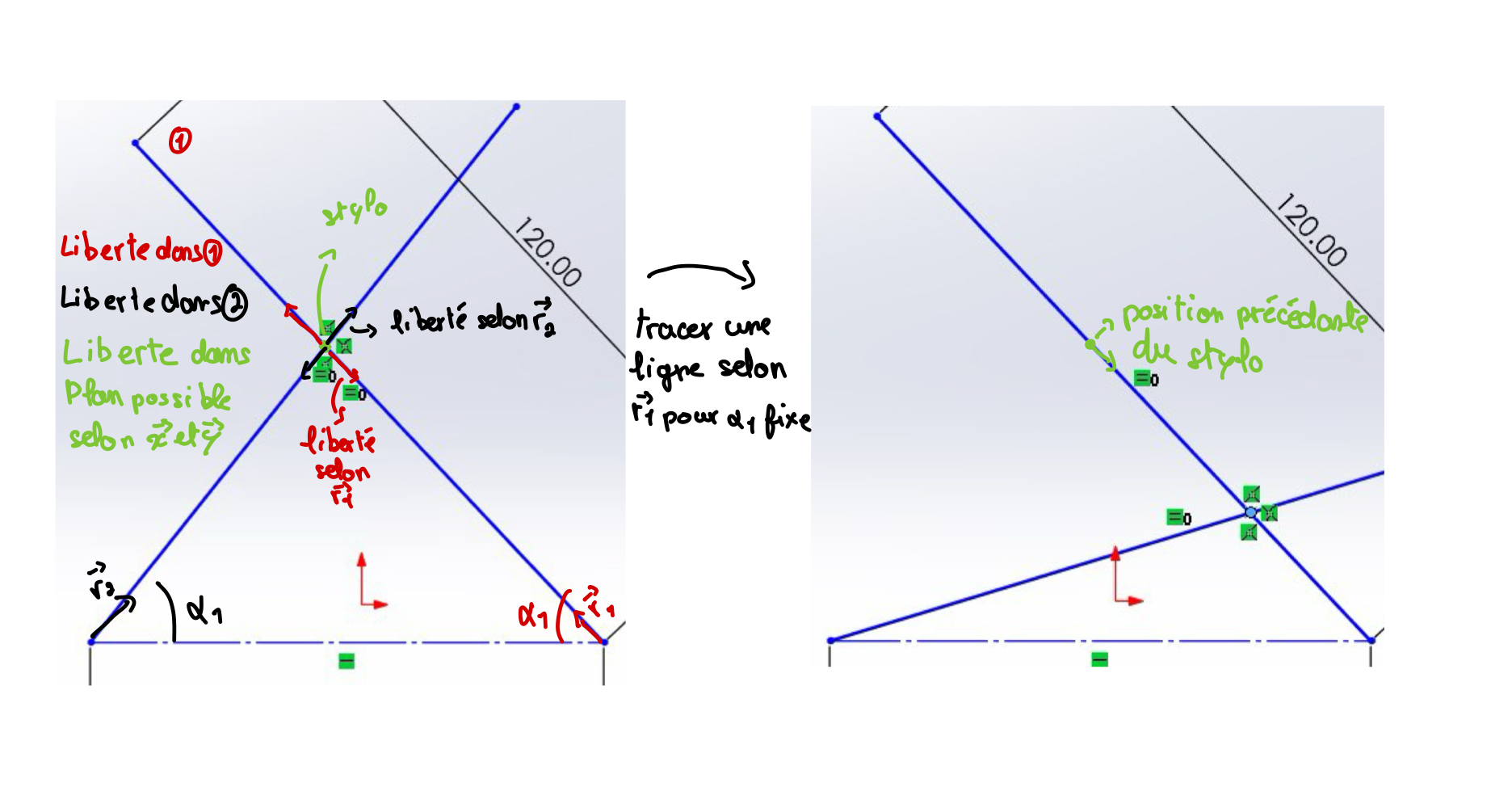
Idée 4 - Point d'intersection
|
Le robot sera doté d'un mécanisme de ciseaux alimenté par deux servo-moteurs positionnés aux coins de la base d'écriture. Chacun entraînera la rotation d'une poutre, permettant des mouvements de glissement dans les deux directions du vecteur r de rotation,. Le point d'intersection des deux poutres (créant ainsi une liaison glissière complexe) serait équipé du stylo, assurant une couverture totale de la feuille grâce à cette configuration ingénieuse.
Inconvenients:
|
Idée 5 - Robot type SCARA |
|
Principe: On a pensé de faire un robot qui a deux axes de rotation verticales et une axe de rotation horizontale. En fait, il y aura deux rotations autour de deuz axes Z (Z1 et Z2) verticales et une troisieme rotation autour de Z3 qui est perpandiculier au axe (Z2). | Croquis: |

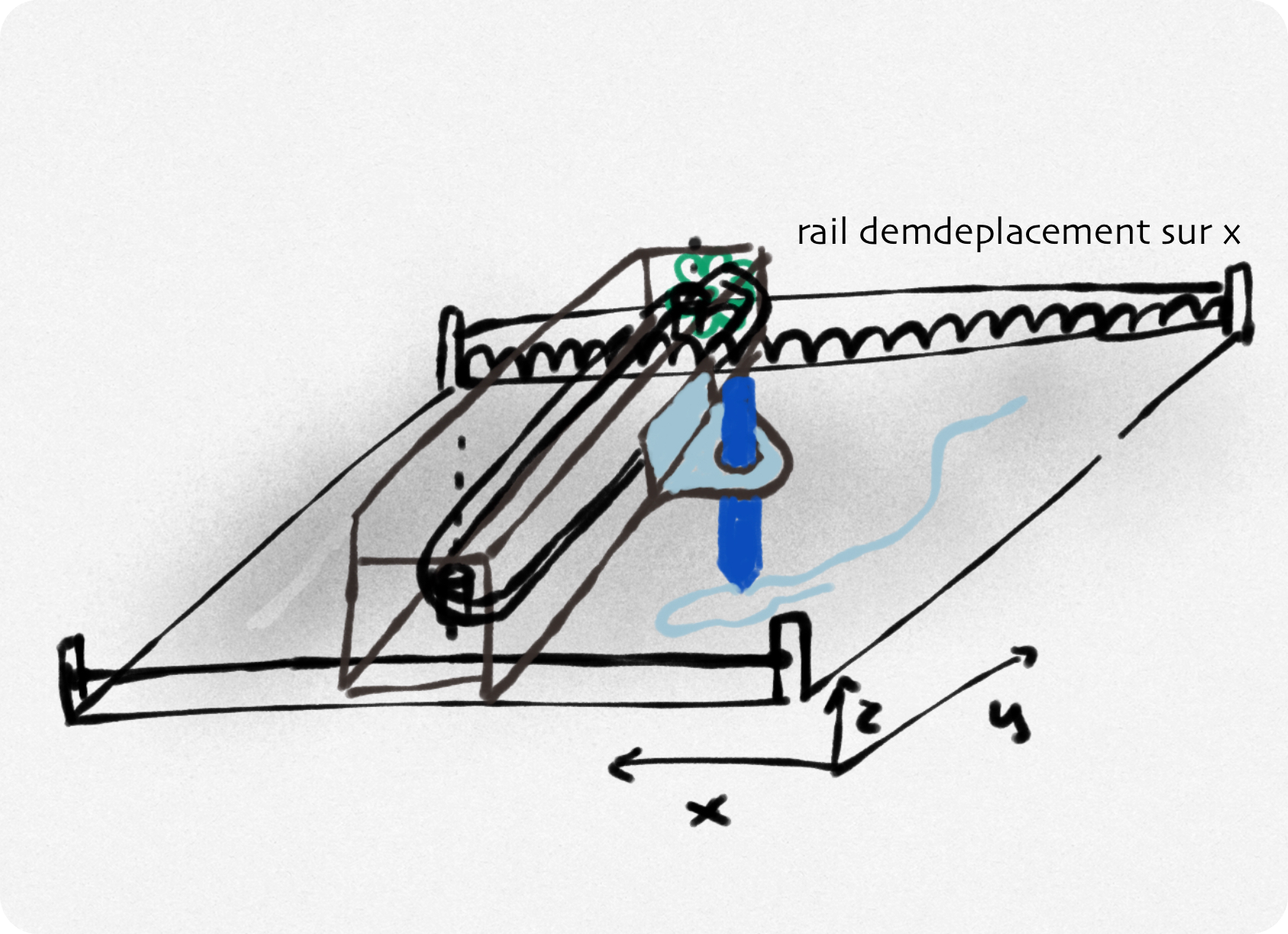 Figure 3: Le croquis d'un robot cartésien
Figure 3: Le croquis d'un robot cartésien Figure 4: Démonstration du mécanism de sciseaux
Figure 4: Démonstration du mécanism de sciseaux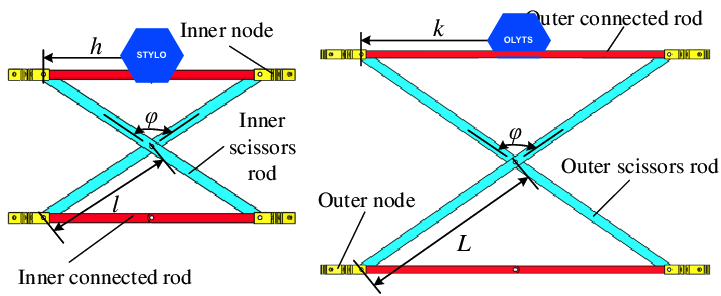
 Figure
Figure 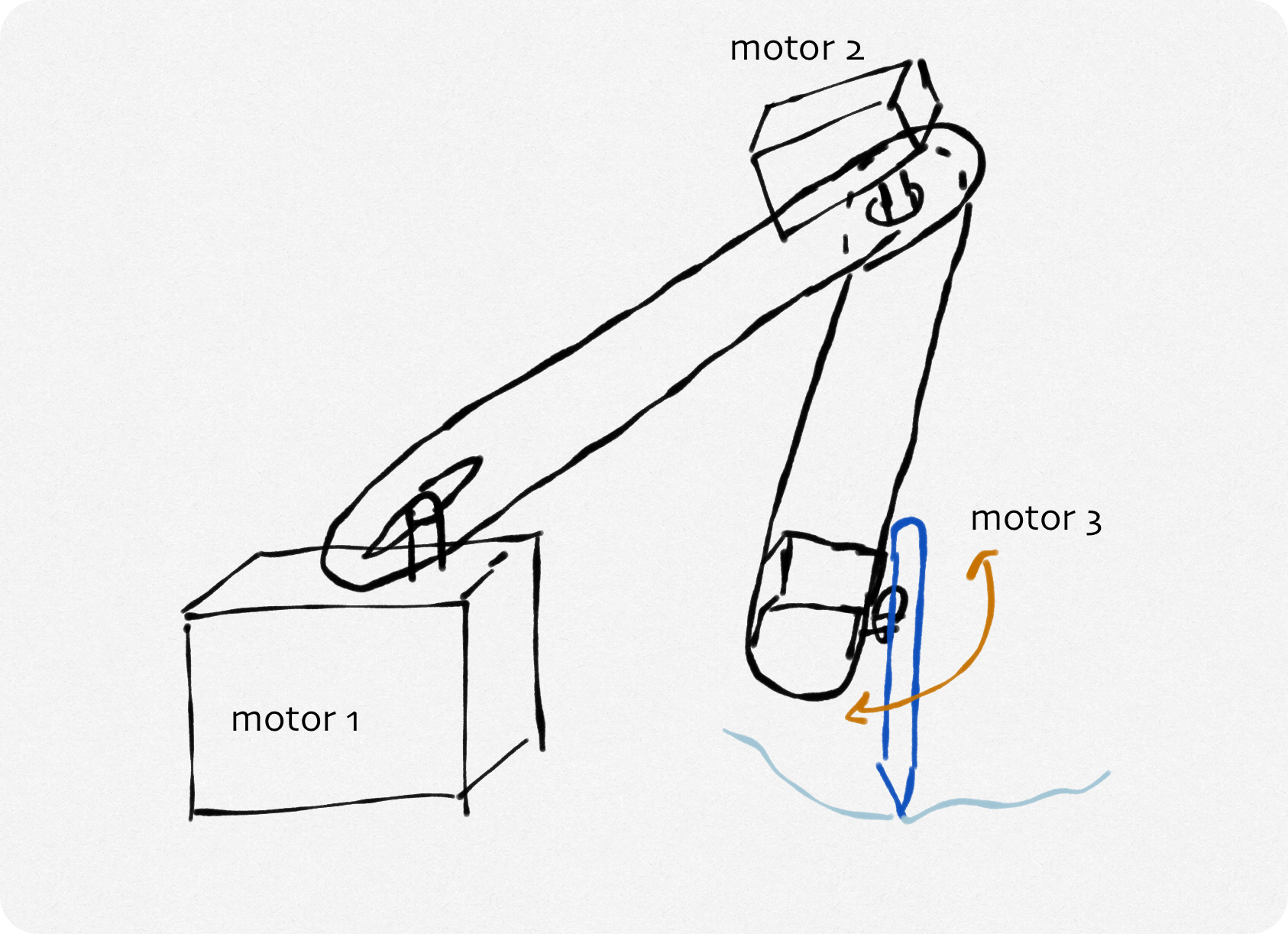 Figure 6: croquis du robot avec 2 degrées de liberté
Figure 6: croquis du robot avec 2 degrées de libertéInconvenients:
Raisons
- Poids excessive sur l'endroit du moteur 2, quelque chose qui pourrait impacter la precision de designs. Idéalement, on voudrait trouver une solution qui permettra de deplacer ce moteur sur le corps de la base principale du robot (oú se trouve le moteur 1) en utilisant les outils qu'on a à notre disposition.
Idée 6 - Robot parallélépipède
Principe:
Inspiré par le mécanishm du robot type SCARA, on avait une reflexion: "Pourquoi on ne deplace pas le moteur de la 2éme rotation (moteur2), sur le même axe de rotation qui cellui du moteur 1. Le résultat du mouvement sera la même tout en ayant deplacé la majorité du poids sur le corps principale du robot.
Croquis:
Avantages:
- Moins de poids sur les articulations mobiles du robot => meilleur précision par rapport l'idée d'avant.
Inconvenients:
- Selon la manière d'expression du modèle géométrique direct, le calcul du modèle géométrique inverse pourrait être compliqué.
- La modélisation des
rejetsquelques piéces unique pour la réalisation de ce type du robot pourrait augmenter le temps de fabrication et l'utilisation de matiére.
Solution retenue
Ayant effectué une évaluation approfondie des différentes alternatives, notre équipe a choisi de privilégier le développement d'un robot type parallélépipède pour la prochaine étape du projet. Cette décision est basée sur plusieurs points clés :
Idée robotRobot de roues
- Pour s'assurer de la validité de la trajectoire, il faudrait l’équiper de capteurs odométrique. Nous ne disposons pas de ce matériel
- L'utilisation des servomoteurs empêcherait de faire rouler le robot indéfiniment. Cela ne serait pas un problème avec l'exercice 1. L'exercice 2 pourrait se révéler impossible à faire (Prenons par exemple un cas hyperbolique et fantaisiste: La forme à dessiner au joystick est une réplique de la Joconde. Le robot ne pourrait jamais faire ceci)
- Pour s'assurer de la validité de la trajectoire, il faudrait l’équiper de capteurs odométrique. Nous ne disposons pas de ce matériel
3DRobotPrinting ideaXY
- Le système de bielle manivelle pourrait se révéler trop massif pour le robot.
- La solution consommerait beaucoup de matière
ScissorsRobotmechanism idea"scissors"
- Selon la mécanique de la pièce, la création des lignes droites perpendiculaires du stylo n'est pas toujours possible à cause des mouvements révolutionnaires du mécanisme
- Les déplacement sont limités à des trajectoires bien précises, ce qui rend le contrôle au joystick frustrant.
IdéeRobotpoint d'intersection
- Il s'agit d'une idée très complète. Cependant, lorsque l'effecteur se trouve à l'extrémité des deux axes de guidage, il faut exercer une force massive pour l'en sortir et le faire revenir près des moteurs.
Nous pourrions contourner ce problème en faisant en sorte que les axes soient bien plus grand que la zone de travail. Mais:- Cela impliquerait un ajout de matière, et donc de masse
- Cela n'empêcherait pas un utilisateur au joystick de bloquer le robot
- Il s'agit d'une idée très complète. Cependant, lorsque l'effecteur se trouve à l'extrémité des deux axes de guidage, il faut exercer une force massive pour l'en sortir et le faire revenir près des moteurs.
Décisiontype Finale
SCARA
Le robot
Nous avons finalement tablé sur un bras robotique (SCARA, FANUC etc.) à 3 articulations. 2 articulations pour les mouvements dans le plan, 1 articulation qui dirige la montée et descente du stylo.
Les risques
- Il
fauts'agitbiendeévidementnotreprendreidéeendecomptedepartlesdesingularitésbase, Il faut faire attentionmais à larépartitiondécouverte de l'idée numero 6 qui nous permetra de deplacer les deux moteur sur le corp de la base dupoids,robot, on a decidé de developer le robotétanttypebeaucoupparallélépipède.
LesÉtape avantages
2: C'est un modèle connu du groupe, la partie mathématique est donc plus simple à réaliserBeaucoup de manières de retirer de la matière.
GANTT
Il y a un lien interactif qui est mis à jour à chaque modification via https://airtable.com/appVydj1BDLSFj432/shrm5Cjk0diMBPmgL
Project FabLab ROB3 Tasks (GANTT).pdf
Conception détaillée
Nota bene
On avait déjà commencé l'analyse du modéle cinematique du robot de l'idée numero 5 (type SCARA). Ci-dessous vous allez trouver l'option également de visualiser et voir le calcul qui était effectué pour ce robot, ainsi que pour le robot type parallélépipède (idée numero 6).
Robot type SCARA
Cinématique
Schéma Cinématique + Tableau DH
 Les deux premières liaisons, pour 𝑖∈{1,..,2}, sont des liaisons pivot d’axe (𝑂𝑖,𝑧𝑖). La troisième liaison est une liaison pivot d'axe aussi selon z3.
Les deux premières liaisons, pour 𝑖∈{1,..,2}, sont des liaisons pivot d’axe (𝑂𝑖,𝑧𝑖). La troisième liaison est une liaison pivot d'axe aussi selon z3.
MatricesModèle degéométrique transformationdirecte homogènes(complet)
Calculant T0->1, T1->2, T2->effector, ansi que T0->effector.


Les résultas sont disponibles en PDF sur: Matrices de transformation homogene.pdf
Electronique
Modèle
WIP
CAO
directe Croquis(simplifié)
WIPOn peut également s'intereser seulement sur les deux prémieres rotations car ils sont eux qui vont donner la position finale du stylo. Comme ça on peut simplifier le calcul comme ci-dessous:
Programmation
Modèle géométrique inverse
WIPAinsi selon le modèle géométrique directe et le calcul du Jacobien inverse on peut obtenir le modèle géométrique inverse:
Conception
Robot type parallélépipède)de
Modèle géométrique directe
Ci-dessous vous pouvez trouver l'approche mathématique du robot type parallélépipède.de pour sa modèle géométrique directe.
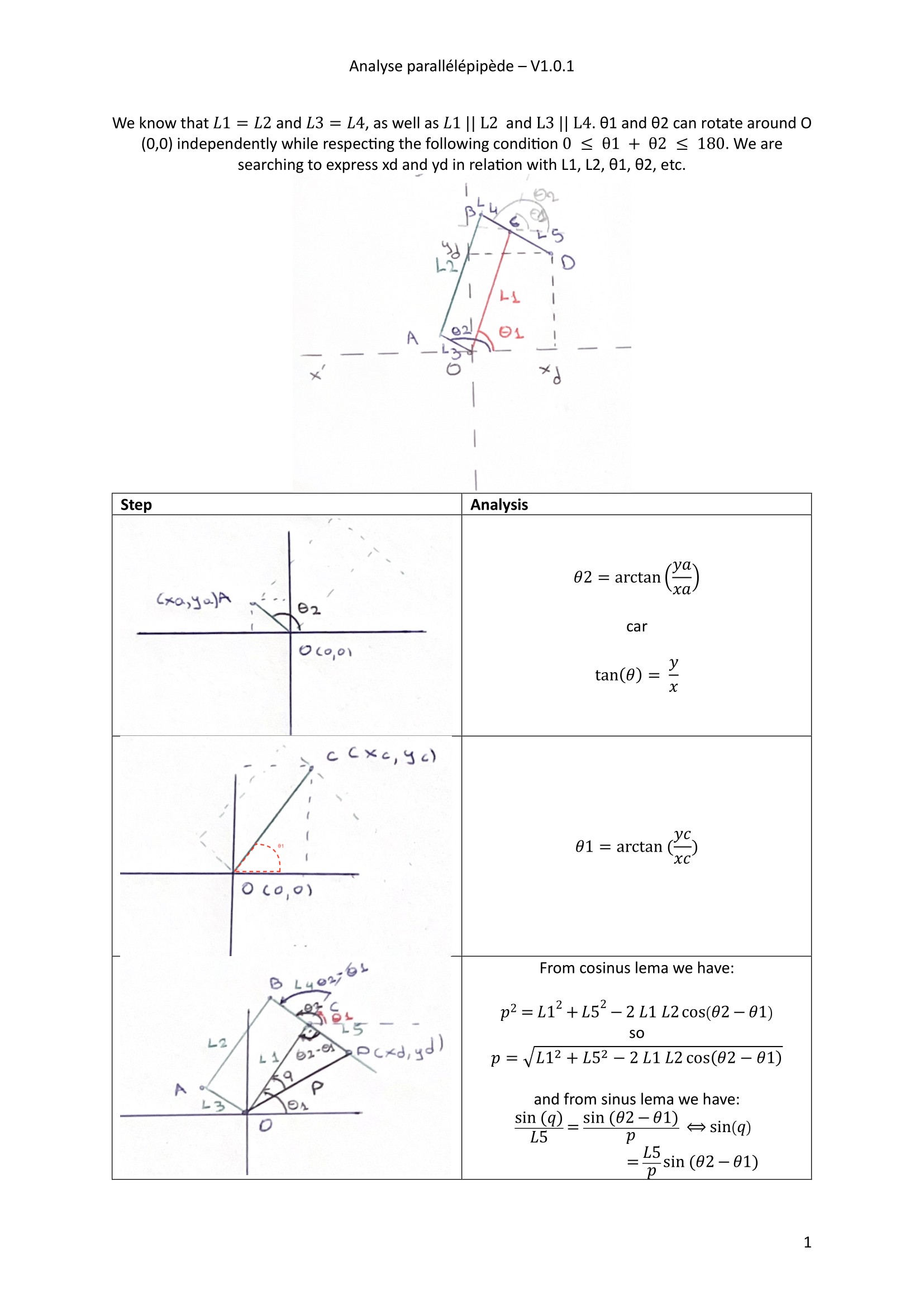

Les résultas sont disponibles en PDF sur: Paralléléplipède Robot.pdf
Electronique
Schéma
WIP
CAO
Croquisélectronique
WIPSur notre schéma électronique il y a un bouton qui permet de changer entre mode manuelle et mode automatique. De plus, il y a deux LEDs qui indique sur quel mode on est un moment donnée. Par exemple si on est en mode manuelle, le LED bleu est allumé, sinon le LED vert est allumé. Em outre, vous pouvez aussi trouver la connection du joystick analogique qu'on a besoin pour la réalisation de l'exercice 2. Il faut noter que le joystick a un fonctionnement de bouton intégré. On peut utiliser cette fonctionnalité pour controller plean different chooses par exemple:
Programmation
- Le stylo écrit ou pas.
- On fait un dessin avec le joystick qu'on visualise sur l'écran de l'ordinateur et on tap le bouton pour confirmer le dessin afin qu'il est créé par le robot.
WIP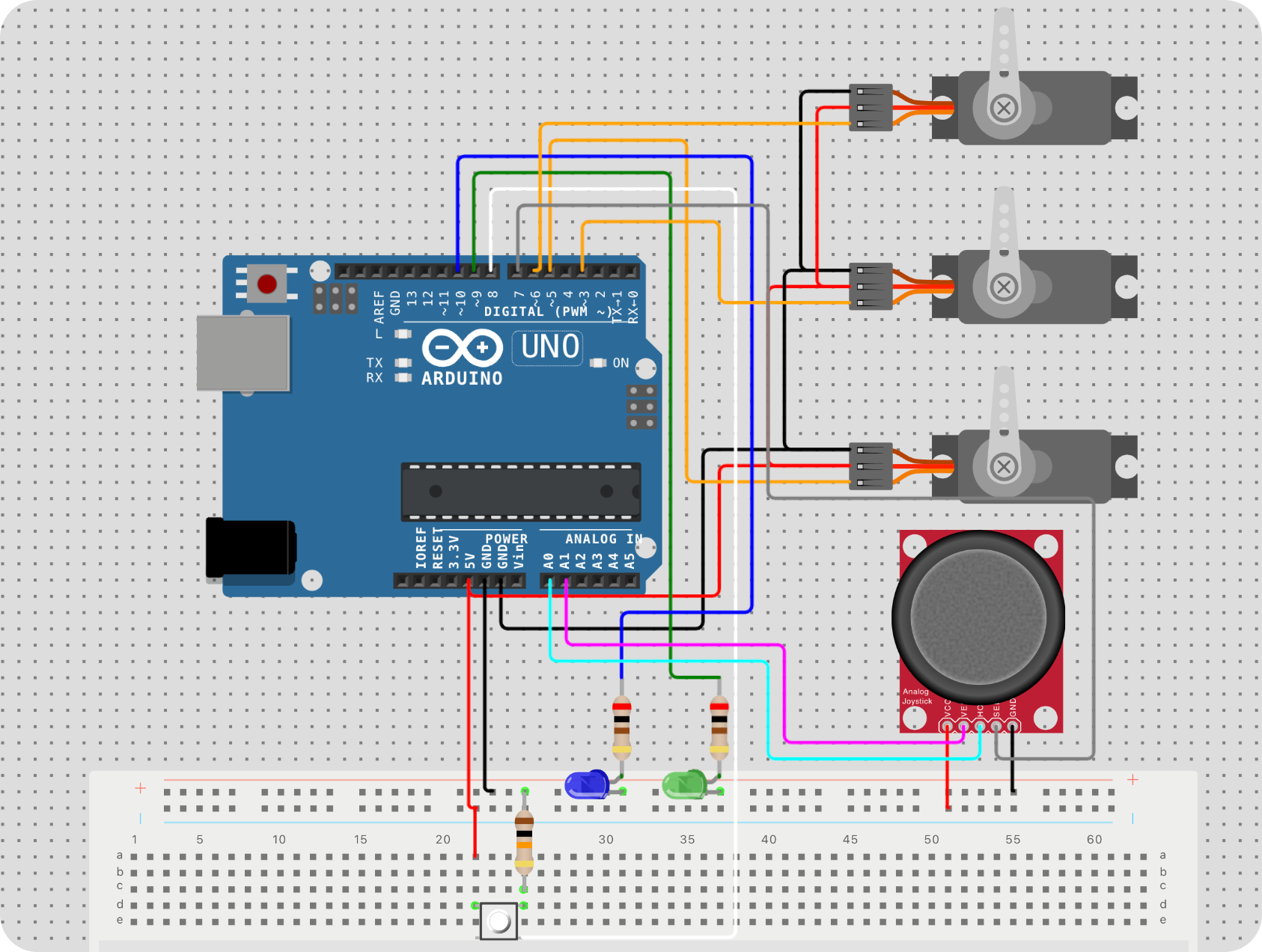
Réalisation
Modélisation
Journal de bord / Calendrier
Avancée du projet à chaque étape, difficultés rencontrées, modifications et adaptations
14/02/2024
Discussion autour du Projet Robotique ROB3 - différents idées, décission, planning.
16/02/2024
Provided a first kinematics schema and version 1 of DH table
19/02/2024
Wiki: preliminary dossier was updated + DH: more detailed conception and corrected the table
22/02/2024
Debut de modélisation des pieces du robot
24/02/2024
Recherche sur les méthodes de géometrieométrie inverse du robot
02/03/2024
Finalisation de la partie modèle géométrique directe et inverse