grblHAL sur Arduino DUE (sans breaking board)
Informations
- Thomas Panier
- thomas.panier@upmc.fr
- Laboratoire Jean Perrin - SU
- 17-03-2023
Contexte
Détournement d'une fraiseuse 3 axes pour faire le suivi de la nage d'une larve de poisson, en remplaçant le moteur par une caméra
Objectifs
Contrôler des drivers de moteurs pas-à-pas avec un arduino Due et grblHAL en envoyant du g-code. Déterminer s'il est nécessaire d'utiliser une breakout board en plus de l'arduino.
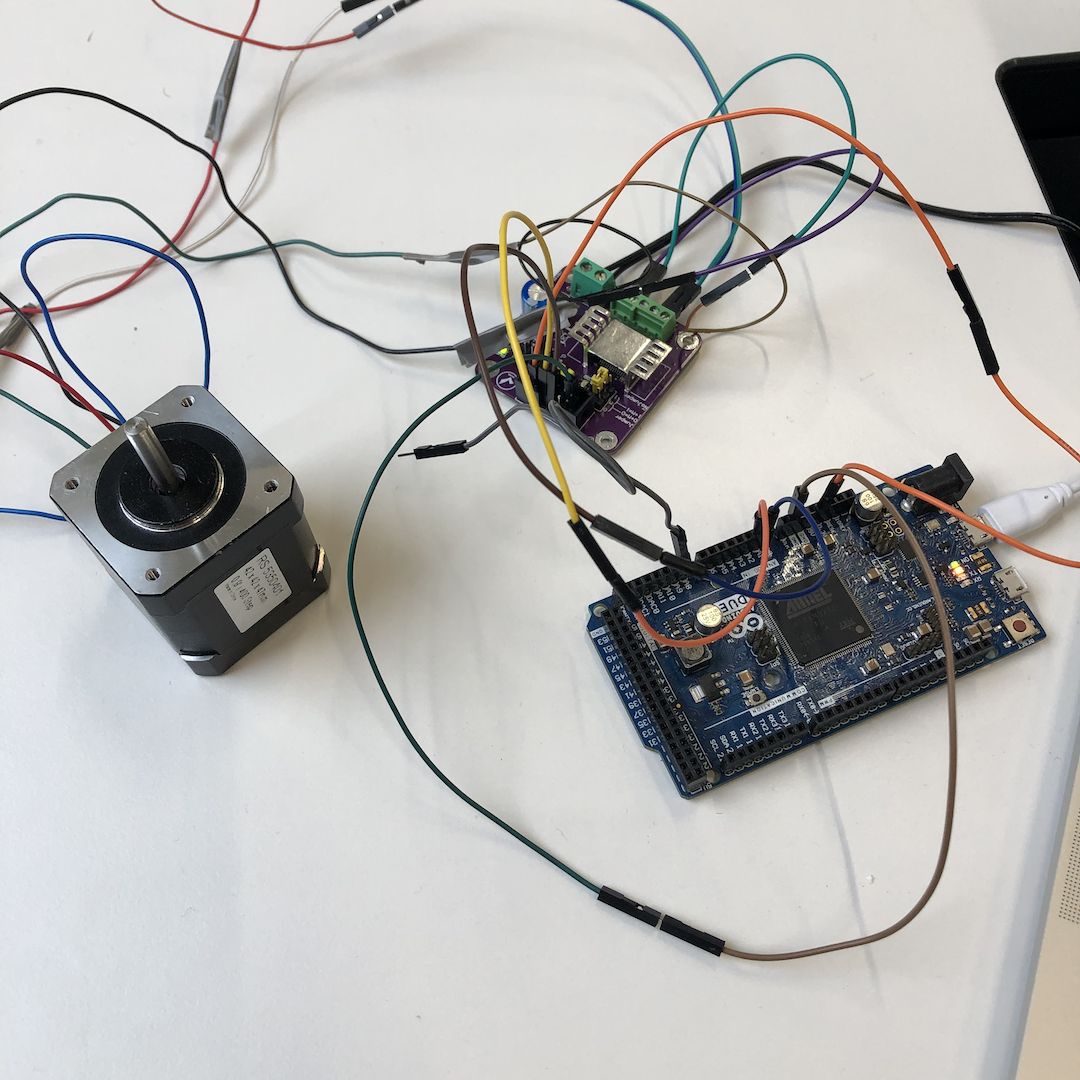
Test avec 1 moteur
Matériel
- Ordinateur avec Arduino IDE installé et prise en charge de l'arduino Due
- Arduino Due
- Driver de moteur pas-à-pas Postep25-256
- Alimentation 24V
- Petits fils de liaison
Construction
Suivre les indications de cette page https://github.com/grblHAL/core/wiki/Compiling-GrblHAL
Attention au mappage par défaut des pins de sortie. Voir dans /src/my_machine.h quelle board est dé-commentée et voir le fichier xxxx_map.h correspondant. Pour vérification des pins : 
Câbler les pins 'enable', 'dir', 'step' et 'ground' entre l'arduino et le driver Postep à l'aide de la doc : https://www.poscope.com/wp-content/uploads/2022/11/PoStep25-256-UserManualV1.1.pdf
Envoyer des commandes grbl via le moniteur série de arduino IDE. Laisser le Due branché via son port 'programming'.
Journal de bord
Ça m'a pris 2 heures en tout à débugger, avec comme difficulté principale la recherche des pins à utiliser.
No Comments