Gazebo - Introduction
Dans ce projet il sera question de nombreux outils de robotique notamment ROS et Gazebo, si vous souhaitez reproduire ce projet il est fortement conseillé de suivre les tutoriels ROS : http://wiki.ros.org/Documentation
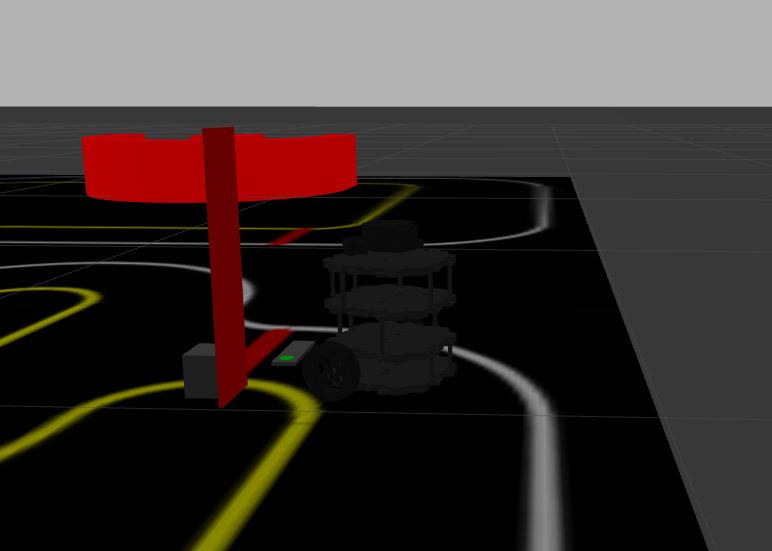
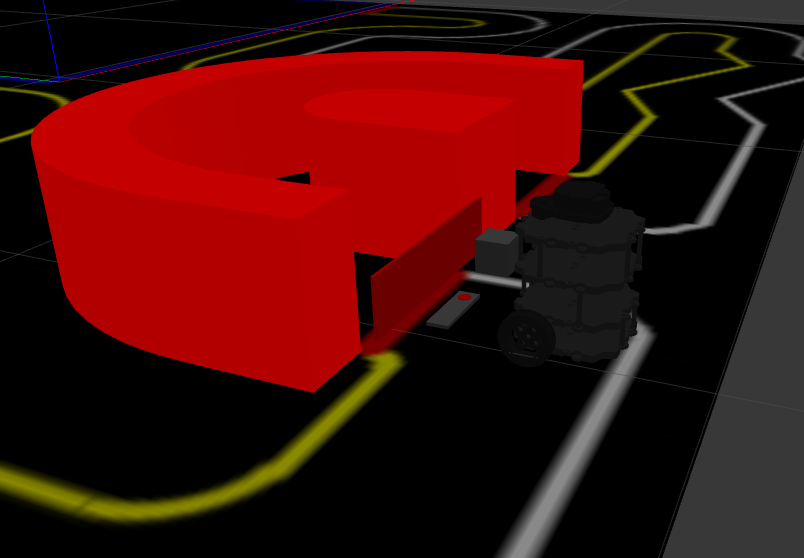
Nous allons simuler le robot turtlebot dans un environnement le plus réaliste possible. Pour cela, nous utiliserons Gazebo:

Dans cet environnement, notre turtlebot va rencontrer les obstacles auxquels il fera face ensuite hors de la simulation:
- Des lignes à suivre
- Un rond-point à contourner
- Une barrière et un feu pour contrôler le traffic
- Un corridor fermé par une barrière
No Comments