Mise en œuvre M5Stack + Driver Module
J'utilise un M5Stack BASIC v2.6. Il faut dans l'IDE Arduino de choisir un M5Stack-Station dans le type de microcontroleur, et limiter les vitesses d'upload.
D'autre part, j'utilise le Stepmotor Driver Module 13.2. Il dispose de 3 drivers X,Y,Z et de 4 switchs de fin de course.
C'est donc en principe suffisant pour ce que je cherche à faire.
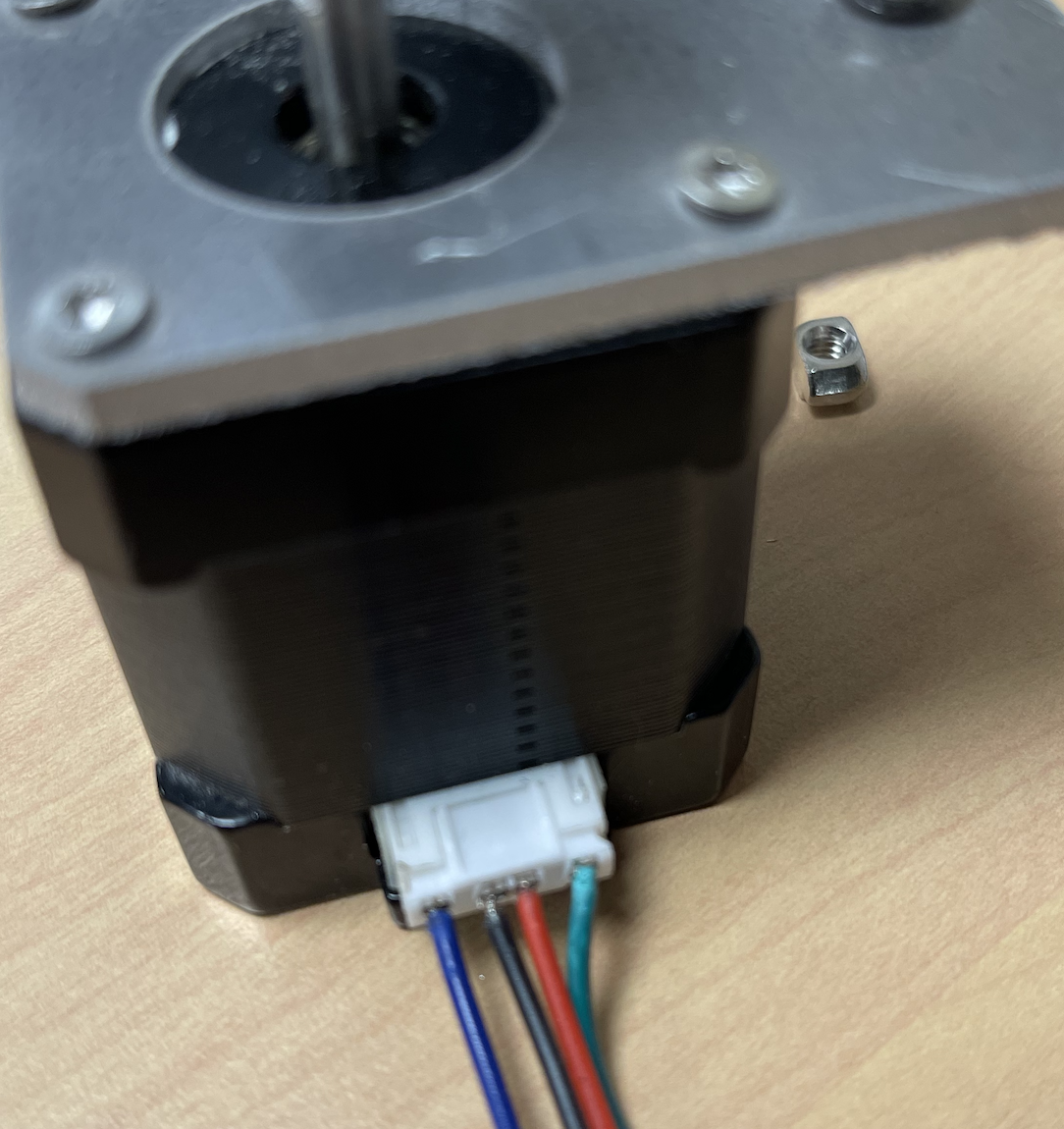
Les moteurs sont des MOTECH MT-170HS168A, à 1,8°/pas. Les moteurs disposent de connecteurs 6 pins JST-PH (espacement 2.0mm), mais sont quadrupolaires... Après avoir acheté un coffret de connecteurs à sertir, on commence donc par identifier les bobines à l'aide d'un multimètre.
Le meilleur tutoriel pour avoir le bon geste de sertissage et éviter d'y passer des heures de frustration :
https://www.youtube.com/watch?v=dY3hbyF3ypA
Voici le câblage obtenu :

Un M5Stack et module driver brûlés par faute d'un déplacement intempestif, on arrive à faire fonctionner l'exemple produit ici
/*
*******************************************************************************
* Copyright (c) 2021 by M5Stack
* Equipped with M5Core sample source code
* 配套 M5Core 示例源代码
* Visit for more
information:https://docs.m5stack.com/en/module/stepmotor_driver
* 获取更多资料请访问:https://docs.m5stack.com/zh_CN/module/stepmotor_driver
*
* Describe: Stepmotor With Pluse.
* Date: 2021/11/14
*******************************************************************************
StepMotor Driver Module TEST Example,Directly drive the motor using pulse
signals. 步进电机模块测试示例,使用脉冲信号直接驱动电机
*/
#include "M5Stack.h"
#include "Module_Stepmotor.h"
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
// #define VERSION_1_0
String inputString = "";
bool stringComplete = false;
static Module_Stepmotor driver;
void setup() {
M5.begin(true, false, true, false);
M5.Lcd.clear(TFT_BLACK);
M5.Lcd.setTextSize(2);
M5.Lcd.setTextColor(TFT_GREEN);
M5.Lcd.setTextDatum(MC_DATUM);
M5.Lcd.drawString("DIRECT_STEPMOTOR", 160, 10, 2);
M5.Lcd.setTextColor(TFT_YELLOW);
M5.Lcd.drawString("LIMIT IO STATUS", 160, 90, 2);
M5.Lcd.drawString("DIR", 70, 220, 2);
#ifndef VERSION_1_0
M5.Lcd.drawString("FAULT IO STATUS", 160, 160, 2);
M5.Lcd.drawString("RST ALL", 160, 220, 2);
M5.Lcd.drawString("1/1", 260, 220, 2);
#else
M5.Lcd.drawString("STEP", 260, 220, 2);
#endif
Wire.begin(21, 22, 400000UL);
driver.init(Wire);
#ifndef VERSION_1_0
driver.resetMotor(0, 0);
driver.resetMotor(1, 0);
driver.resetMotor(2, 0);
#else
driver.setMicrostepResolution(DIRECT_STEPMOTOR::kMicrosteps16);
#endif
driver.enableMotor(1);
Serial1.begin(115200, SERIAL_8N1, 35, 5);
Serial2.begin(115200, SERIAL_8N1, 34, 26);
Serial2.setTimeout(100);
ledcSetup(0, 10000, 8);
ledcAttachPin(16, 0);
ledcAttachPin(12, 0);
ledcAttachPin(15, 0);
ledcWrite(0, 127);
pinMode(17, OUTPUT);
pinMode(13, OUTPUT);
pinMode(0, OUTPUT);
digitalWrite(17, 1);
digitalWrite(13, 1);
digitalWrite(0, 1);
}
void loop() {
static uint8_t step_dir = 1;
static uint8_t reset_mtr = 0;
static Module_Stepmotor::MicrostepResolution_t micro_res = Module_Stepmotor::kMicrosteps16;
Serial1.print("Y");
delay(25);
M5.update();
if (Serial2.available()) {
char inChar = (char)Serial2.read();
if (inChar == 'Y') {
M5.Lcd.fillRect(105, 180, 120, 20, TFT_GREEN);
}
} else {
M5.Lcd.fillRect(105, 180, 120, 20, TFT_RED);
}
if (M5.BtnA.wasPressed()) {
step_dir = 1 - step_dir;
digitalWrite(17, step_dir);
digitalWrite(13, step_dir);
digitalWrite(0, step_dir);
}
if (M5.BtnB.wasPressed()) {
#ifndef VERSION_1_0
driver.resetMotor(0, 0);
driver.resetMotor(1, 0);
driver.resetMotor(2, 0);
reset_mtr = 0;
#endif
}
if (M5.BtnC.wasPressed()) {
#ifndef VERSION_1_0
if (reset_mtr == 0) {
driver.resetMotor(0, 1);
driver.resetMotor(1, 1);
driver.resetMotor(2, 1);
}
driver.resetMotor(int(reset_mtr / 2), (reset_mtr & 0x01));
reset_mtr += 1;
if (reset_mtr == 6) reset_mtr = 0;
#else
if (micro_res == DIRECT_STEPMOTOR::kMicrosteps16) {
micro_res = DIRECT_STEPMOTOR::kMicrosteps8;
} else {
micro_res = DIRECT_STEPMOTOR::kMicrosteps16;
}
driver.setMicrostepResolution(micro_res);
#endif
}
driver.getExtIOStatus();
if (driver.ext_io_status[3]) {
M5.Lcd.fillRect(70, 45, 20, 20, TFT_RED);
} else {
M5.Lcd.fillRect(70, 45, 20, 20, TFT_GREEN);
}
if (driver.ext_io_status[2]) {
M5.Lcd.fillRect(120, 45, 20, 20, TFT_RED);
} else {
M5.Lcd.fillRect(120, 45, 20, 20, TFT_GREEN);
}
if (driver.ext_io_status[1]) {
M5.Lcd.fillRect(170, 45, 20, 20, TFT_RED);
} else {
M5.Lcd.fillRect(170, 45, 20, 20, TFT_GREEN);
}
if (driver.ext_io_status[0]) {
M5.Lcd.fillRect(220, 45, 20, 20, TFT_RED);
} else {
M5.Lcd.fillRect(220, 45, 20, 20, TFT_GREEN);
}
#ifndef VERSION_1_0
driver.getFaultStatus();
if (driver.fault_io_status[2]) {
M5.Lcd.fillRect(95, 115, 20, 20, TFT_RED);
} else {
M5.Lcd.fillRect(95, 115, 20, 20, TFT_GREEN);
}
if (driver.fault_io_status[1]) {
M5.Lcd.fillRect(145, 115, 20, 20, TFT_RED);
} else {
M5.Lcd.fillRect(145, 115, 20, 20, TFT_GREEN);
}
if (driver.fault_io_status[0]) {
M5.Lcd.fillRect(195, 115, 20, 20, TFT_RED);
} else {
M5.Lcd.fillRect(195, 115, 20, 20, TFT_GREEN);
}
#endif
}
No Comments