Robot livreur de glaçon
Le robot doit pouvoir suivre une ligne noire sur 5 mètres, gravir un pas de 1 cm de hauteur pour enfin déposer un glaçon (cube en bois de 4 cm de côté) dans un cylindre de 8 cm de diamètre intérieur.
Matériel requis:
- Découpeuse laser
- Imprimante 3D
- Visses de différentes tailles
- Connecteurs electriques
- Boutons
- MDF 3mm
- Breadboard
- Motor Driver Module
- 4 moteurs
- 4 roues
- Raspberry Pi Pico (ou autre microcontrôleur)
- capteurs IR
- Servomoteur
Logiciels utilisés:
- PrusaSlicer 2.8.1
- Autodesk Fusion
- FreeCAD
- Modeliser et decouper un cube de 4 cm de côté

- Modéliser et decouper 2 plaques de 15*25 cm.
- Modéliser et imprimer les pylônes (PLA) pour relier les plaques entre elles.
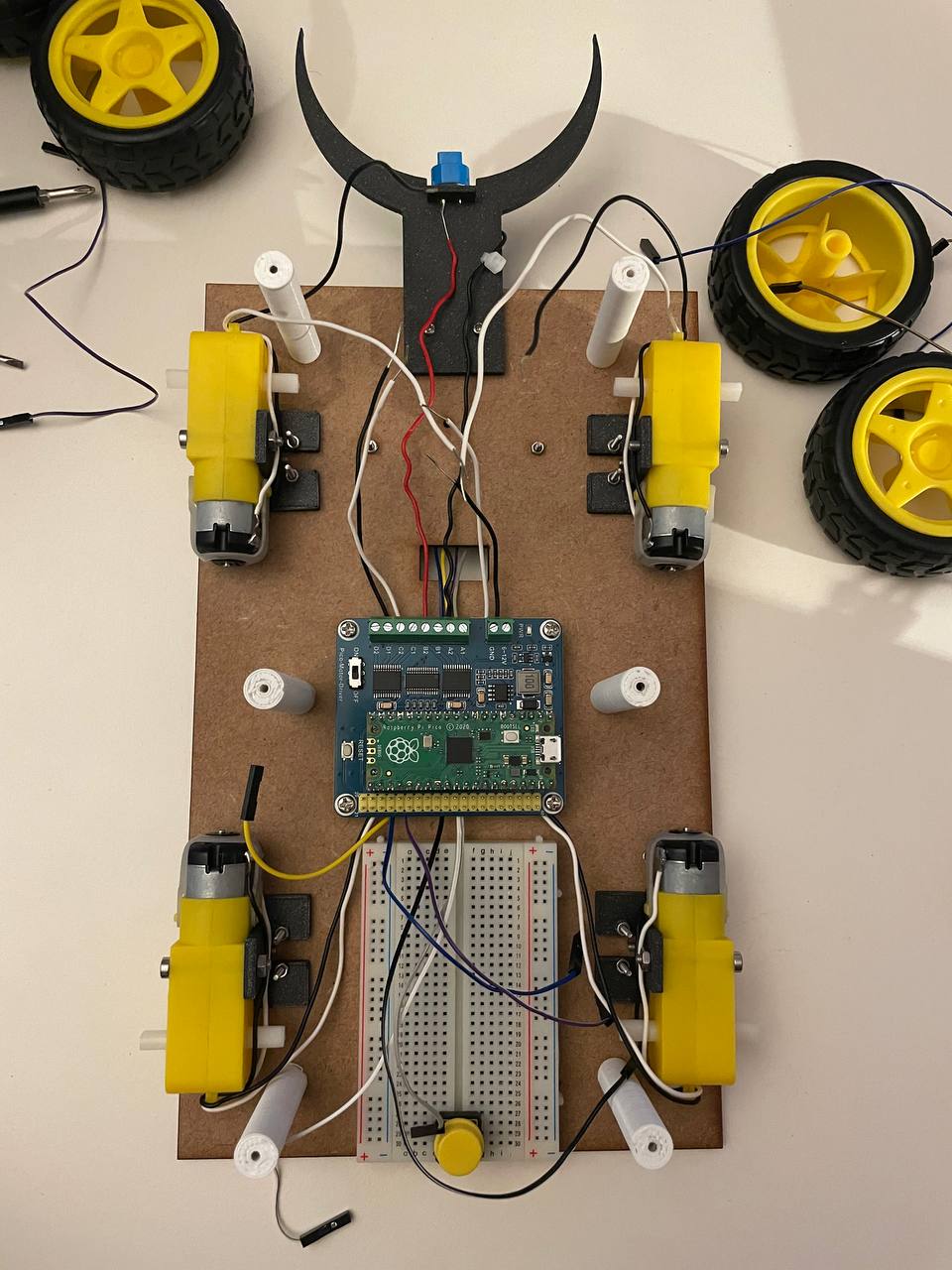
- Souder les moteurs, modeliser et imprimer en 3D (PLA) les accroches pour les moteurs.
- Modéliser et imprimer une pince (PLA) avec courbe équivalente à celle du verre (9cm de diamètre extérieur).
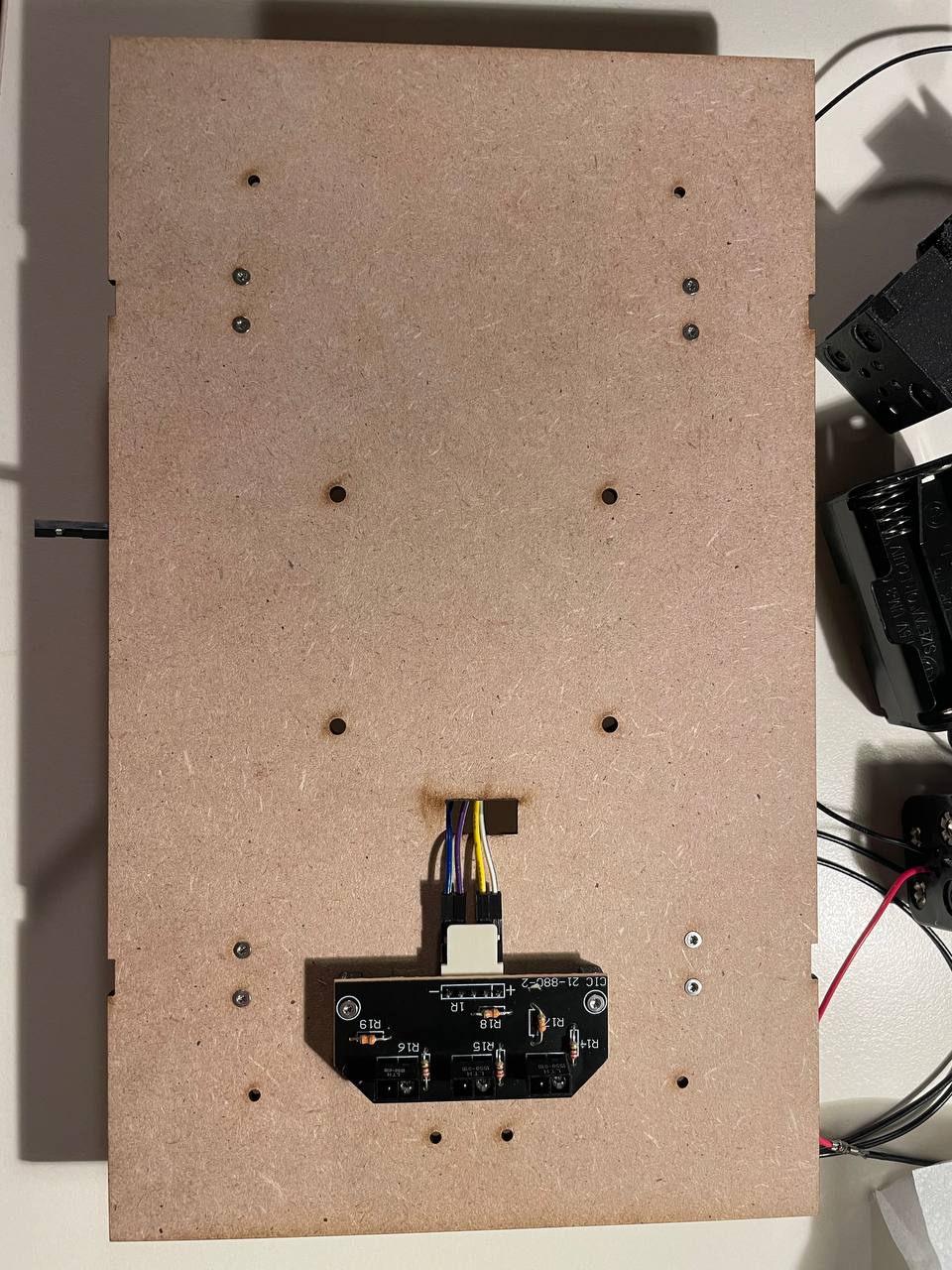
- Assembler la plaque du bas
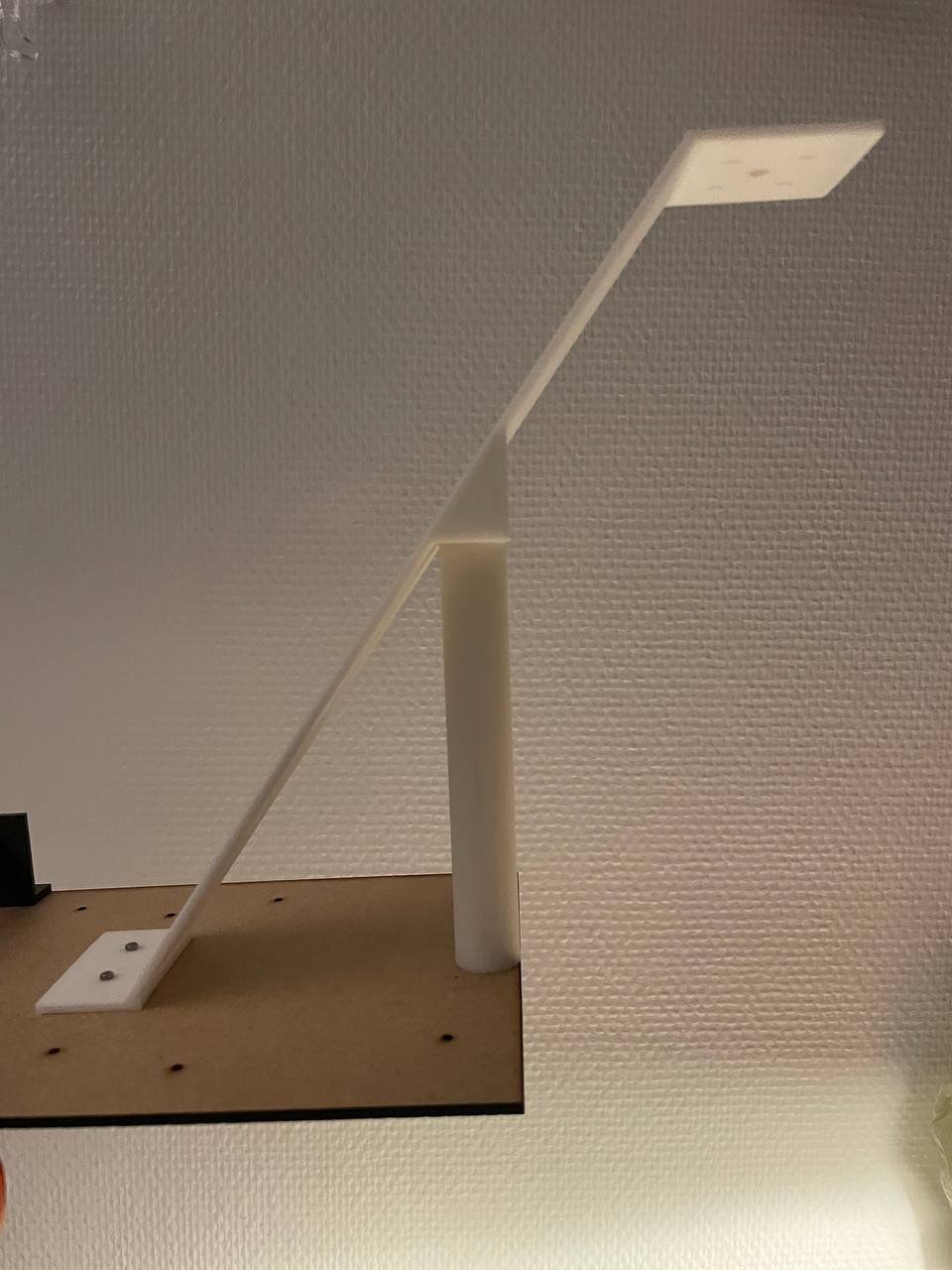
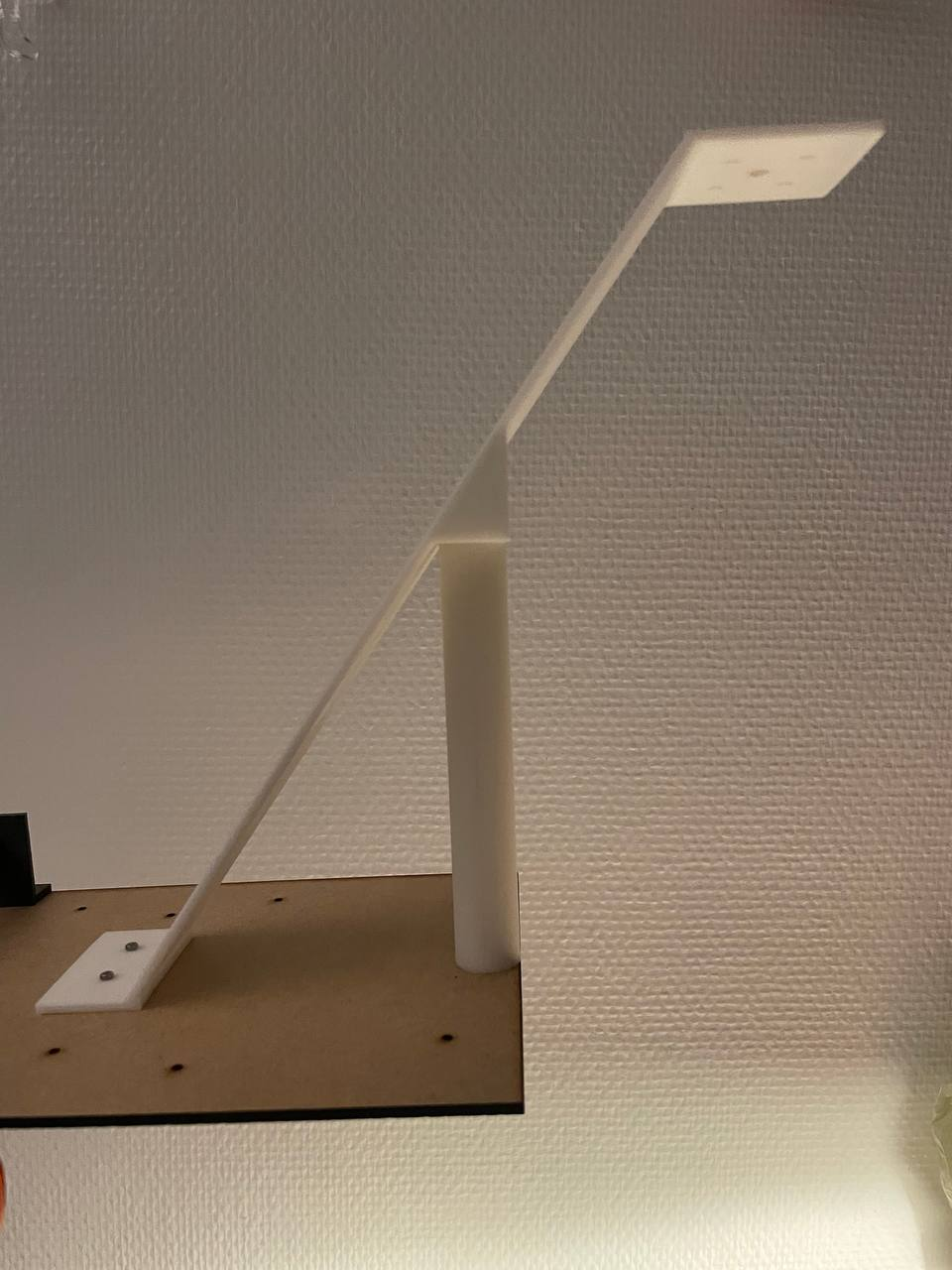
- Modéliser et imprimer la grue. La visser sur la plaque haute.
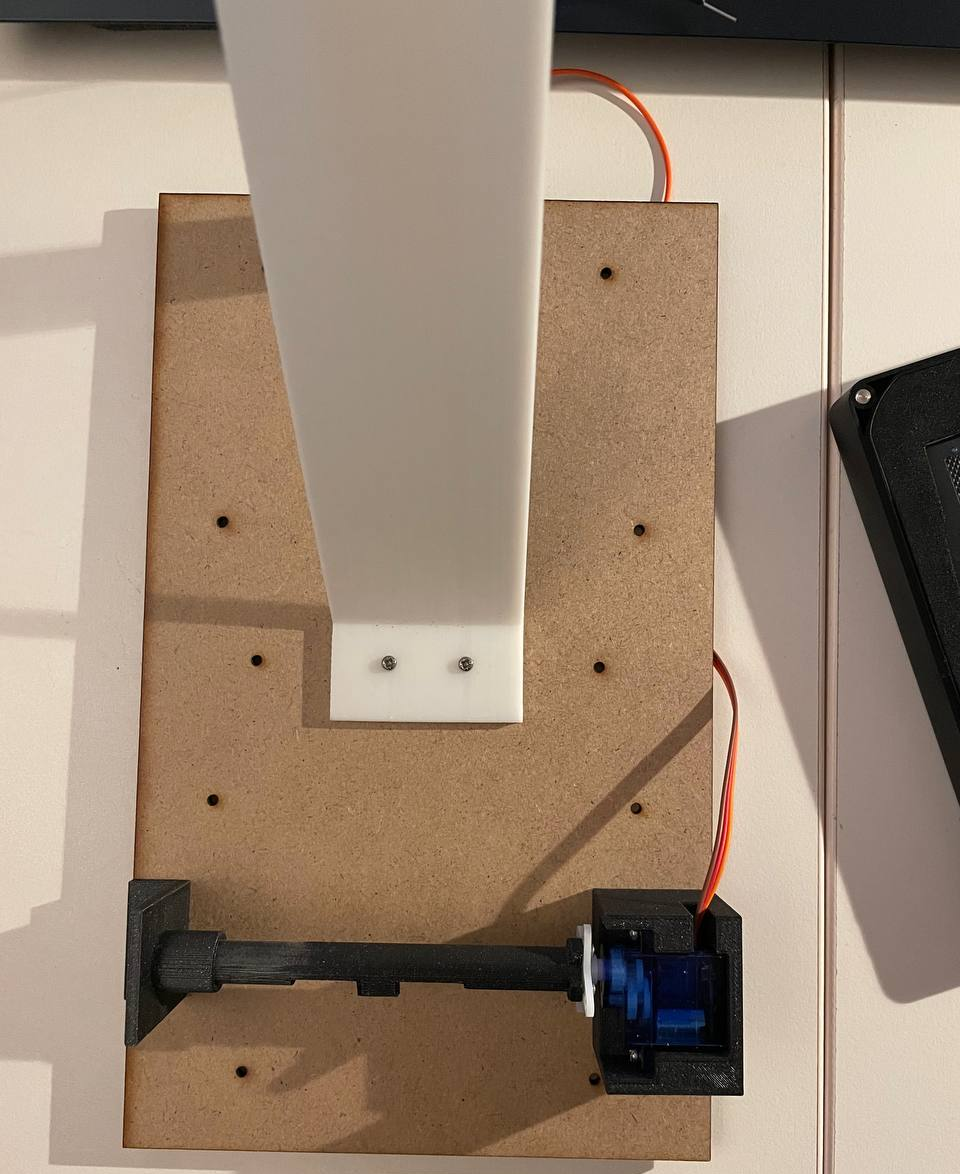
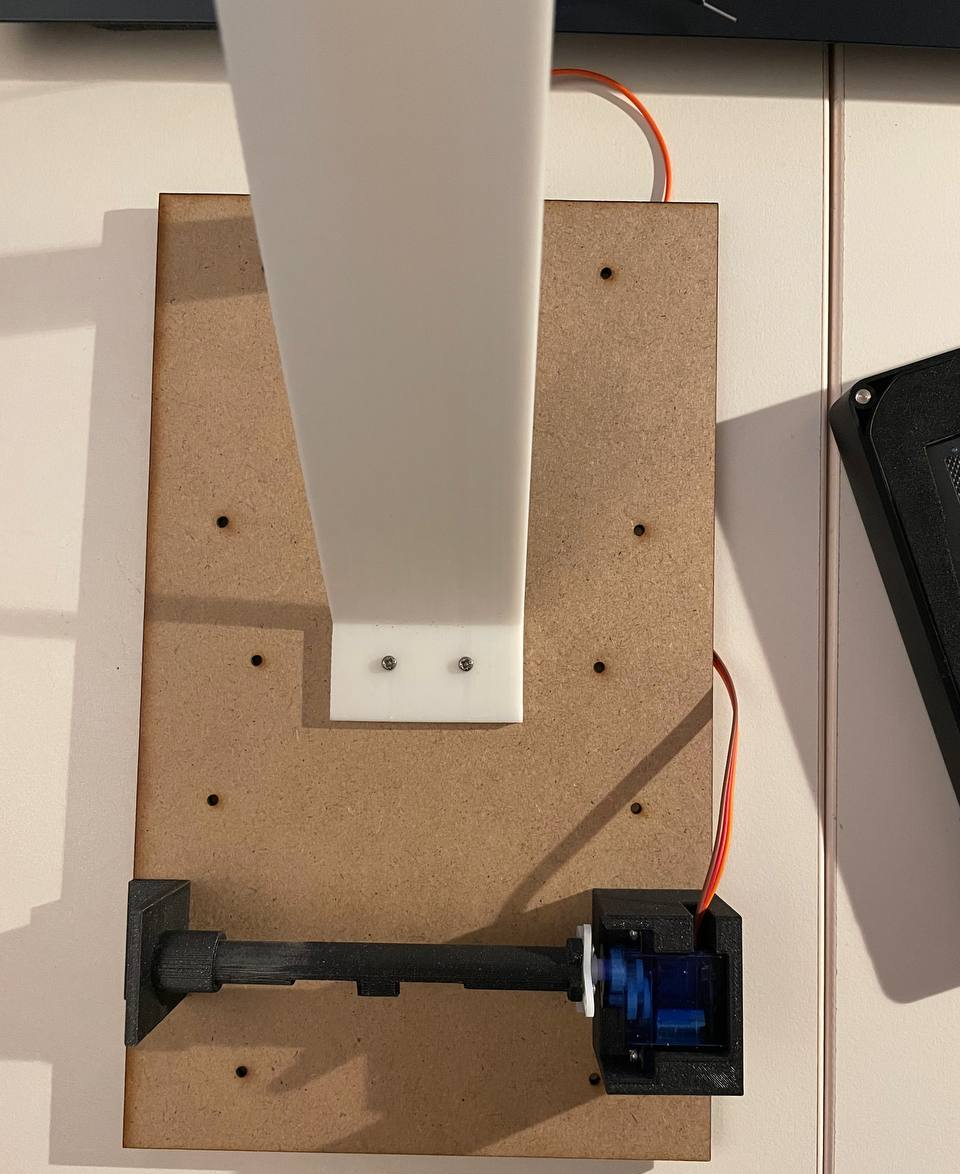
- Modéliser et imprimer le mécanisme pour le servomoteur. Le fixer sur la plaque haute également.
- Ecrire le code (évidemment) de préférence fonctionnel
- La déco!!!

- Assembler le tout



On vous présente notre robot - Fully autonomous relocatable testing system (FARTS)
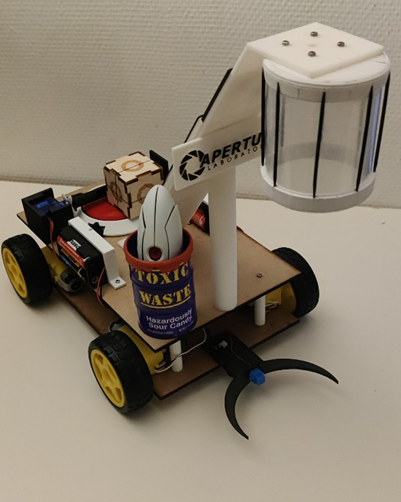
No Comments