Projet SonaROV : un robot sous-marin autonome
Présentation du projet
Informations
-
Michal Drozd | Victor Rashed-Mohassel | Léo Élies
-
michal.drozd@etu.sorbonne-universite.fr | victor.rashed-mohassel@etu.sorbonne-universite.fr | leo.elies@etu.sorbonne-universite.fr
-
L2 Mécanique Mono-Intensif | L2 CMI Mécanique | L2 Mécanique Mono-Intensif
-
01/03/2024 - 03/05/2024
Contexte
L'UE Romarin est un projet de L2 qui consiste à concevoir un ROV (ou Remotely Operated Vehicle). Dans une première partie du projet, la structure du robot a été construite, ainsi que l'installation de toute la partie électronique a été effectuée (moteurs, capteurs de pression, température et luminosité, construction d'une télécommande). Dans un second temps, nous nous sommes penchés sur l'amélioration de ce premier robot sous-marin. Le but du projet était alors d'acquérir une donnée envoyée par des capteurs, de la traiter pour pouvoir piloter les moteurs. Le robot pourrait détecter un objet dans l'eau et se diriger vers lui automatiquement sans l'intervention d'un opérateur. Nous avons décidé de collaborer avec un autre groupe, qui s'est chargé de concevoir une pince robotique, permettant d'attraper l'objet détecté.
Vous trouverez plus d'informations concernant le projet sur le site suivant : https://romarinsu.wordpress.com/
Objectifs
- Concevoir un système de détection d'objet
- L'assembler sur le robot (CAO)
- Réaliser l'asservissement du robot
Étapes
1. Système de détection d'objets
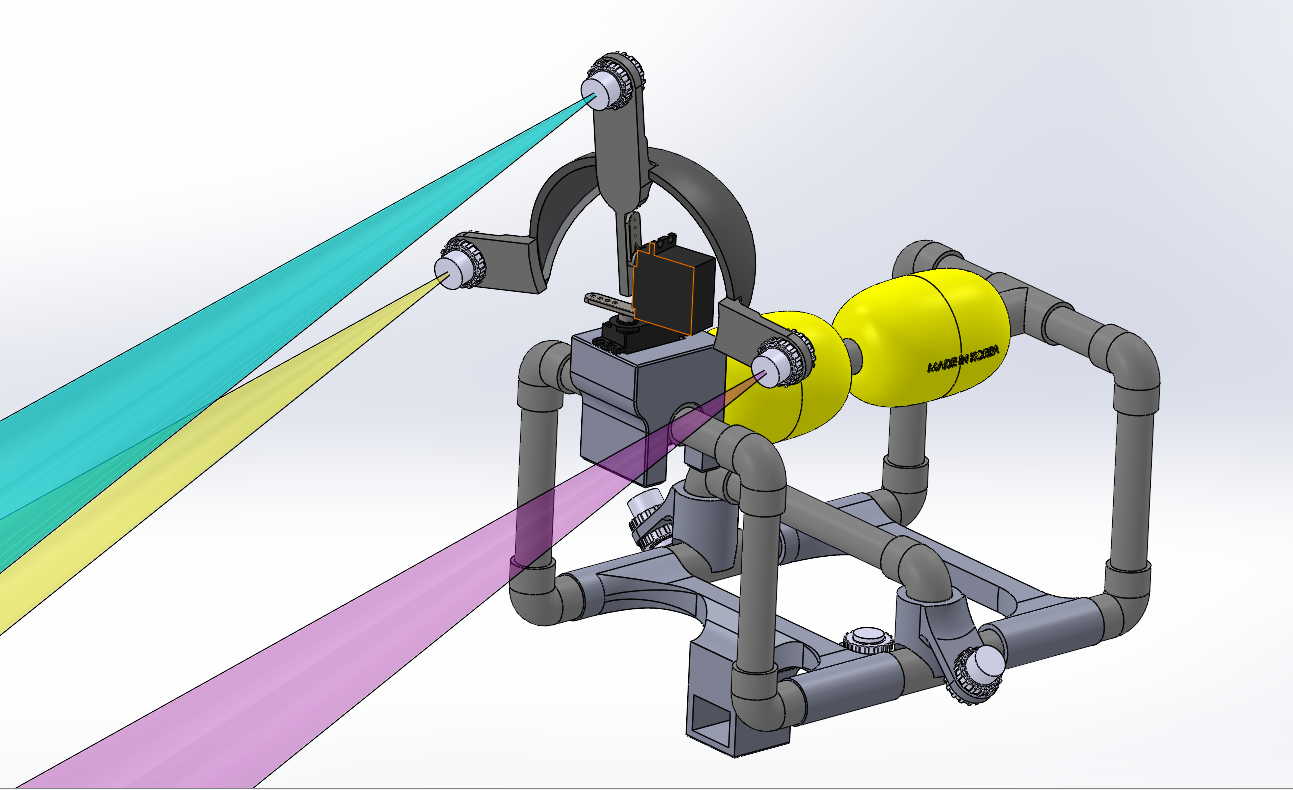
Nous avons décidé d'utiliser des capteurs à ultrasons fonctionnant dans l'eau. À l'aide de deux servomoteurs nous avons construit un système qui balaie l'espace (de gauche à droite et de haut en bas). De cette manière, pour chaque point de l'espace nous obtenons une distance. Il est donc possible de reconstruire une pièce en 3 dimensions par exemple. Nous avons utilisé 3 capteurs afin d'améliorer la précision. Cette étape consistait à concevoir ce système sur le logiciel Solidworks.
Les capteurs latéraux font office de système anti-collision. Si une paroi, risquant de rentrer en collision avec le ROV est détectée, les moteurs sont coupés.
2. Impression des pièces sur imprimante 3D


3. Réalisation de l'asservissement du robot
Le code a été réalisé en Arduino. Nous avons utilisé une carte Arduino UNO.
Journal de bord
02/04/2024
Impression du support triangulaire qui sert à la disposition des 3 capteurs.
Imprimante 3D : Raise 3D Pro 2 Plus
Matériau : PLA Noir
13/05/2024
Impression de la pièce permettant la liaison avec la pince robotique d’un autre groupe.
Imprimante 3D : Raise 3D Pro 2
Matériau : PLA Noir
16/05/2024
Modification du support triangulaire qui sert à la disposition des 3 capteurs et réimpression. L'ancien s'est cassé.
Imprimante 3D : Raise 3D Pro 2
Matériau : PLA Noir
No Comments