Le sujet du projet
Vous êtes réparti.e.s en groupes de 6 élèves, votre but est de concevoir et fabriquer un robot capable de réaliser un exercice défini dans le présent cahier des charges.
1. Le robot
1.1 Description générale.
Vous devez construire un robot schématisé sur la figure 1 et composé de la façon suivante :
- Un charriot mobile de type unicycle amené à se déplacer dans un plan horizontal (le sol d’une arène de jeu).
- Un bras à 1 ddl fixé sur le charriot mobile. Le bras est constitué d’un parallélogramme dans le plan vertical, la barre fixée au charriot se situant dans le plan horizontal, perpendiculairement à l’essieu.
- Une pince montée vers l’avant du robot sur la barre horizontale mobile du parallélogramme.
Vous êtes réparti.e.s en groupes de 6 élèves, votre but est de concevoir et fabriquer un robot capable de réaliser un exercice défini dans le présent cahier des charges.
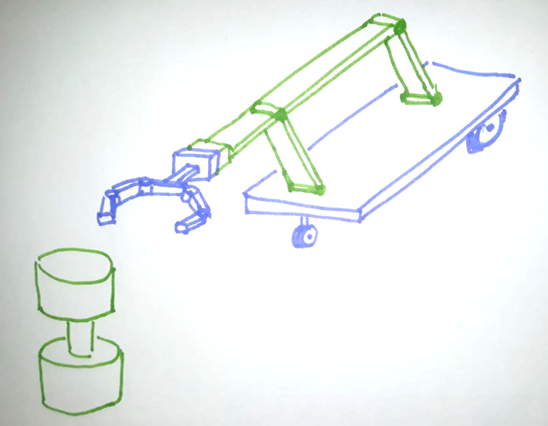
Figure 1 : allure générale du robot.
1.2 Matériel à disposition pour la fabrication du robot et de son contrôleur
Un kit pour l’équipe composé de :
- Une pince 3551 fournie en kit, avec un servo moteur intégré.
- Trois moteurs KTECH MS4015-V3 contrôlables en vitesse et intégrant une mesure de position.
- Deux roues Pleine Guitel Hervieu Ø 50mm destinées à être motorisée et une roue pivotante Guitel Hervieu, Ø 50mm.
- Une carte Arduino UNO + un shield Arduino pour la communication via un bus CAN avec les moteurs
- Deux capteurs de distance à ultrasons HC-SR04
- Une batterie RS PRO 12V 1.2Ah. Un kit de connexion permettant d’alimenter l’Arduino avec la batterie.
Dans le FABLAB Sorbonne Université, sont également disponibles :
- Des planches de médium, 300mmx600mm ép. 6mm ou 3mm, découpables au LASER dans le FABLAB.
- Des petits composants électroniques et mécaniques standard.
- Du filament pour les imprimantes 3D du FABLAB.
2. La tâche
La tâche consiste à déplacer un objet depuis sa configuration initiale vers la configuration finale, à l’intérieur d’une arène.
2.1 L'objet
L’objet est constitué d’un de trois corps empilés selon un axe vertical :
- En bas : un parallélépipède base carrée de 30 mm et de hauteur h, comprise entre 30mm et 60 mm (inconnue avant l’épreuve).
- Au milieu : un parallélépipède de hauteur 30 mm et de section carrée de 10 mm de côté, par laquelle le robot doit le saisir.
- En haut, un cube d’arête 30 mm.
L’assemblage est jointif, mesure au total 60 + h mm de hauteur ; les faces des trois solides sont perpendiculaires deux à deux et leurs trois centres sont alignés sur une droite verticale, cf. Figure 2. L’équipe qui souhaite en connaître son poids peut le peser.
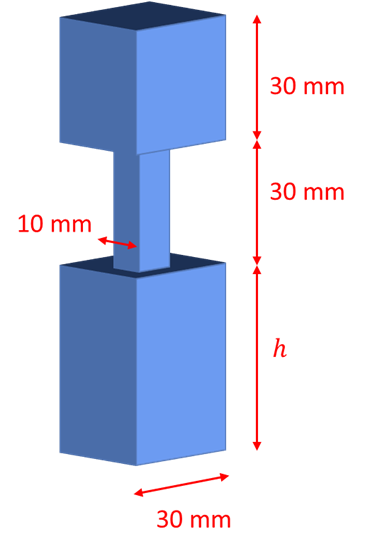
Figure 2 : objet à manipuler. Il doit être saisi avec la pince dans la partie amincie
2.2 L'arène et la tâche à réaliser
L’arène est un plan horizontal carré bordé par des murets verticaux de 10 cm de hauteur. La distance entre les faces intérieures de deux murets opposés est de 1500 ± 10 mm. L’arène est représentée sur la figure 3 par le carré bleu ABCD.
Dans la configuration initiale, le centre de l’objet est placé à une distance a1 du côté AC et à une distance d1 du côté AB. Dans la configuration finale désirée, le centre de l’objet doit être placé à une distance a2 du côté BD et à une distance d2 du côté CD.
Dans les deux configurations, les faces de l’objet sont parallèles aux côtés du carré.
Les distances a1, a2, d1 et d2 sont inconnues du robot, mais respectent la condition suivante : 350 mm>a1, a2 ,d1, d2>250 mm
Pour pouvoir localiser l’objet et la position désirée, trois bornes cubiques (en violet sur la figure 3), de même empreinte au sol que l’objet à saisir, sont positionnés contre les côtés du carré :
- Le premier est plaqué sur le côté BD, et son centre est distant du côté AB de d1 ;
- Le deuxième est plaqué sur le côté AC, et son centre est distant du côté CD de d2 ;
- Le troisième est plaqué sur le côté CD, et son centre est distant du côté BD de a2.
Au début du jeu, le robot est placé par l’équipe dans une configuration initiale. Dans cette configuration :
- La distance entre le centre de son essieu et le côté BD est a3, imposée par l’arbitre (mais inconnue avant l’épreuve) entre 350 et 600 mm.
- La distance entre le centre de son essieu et le côté AB est d3, imposée par l’arbitre (mais inconnue avant l’épreuve) entre 800 et 1000 mm.
- L’orientation est choisie par l’équipe.
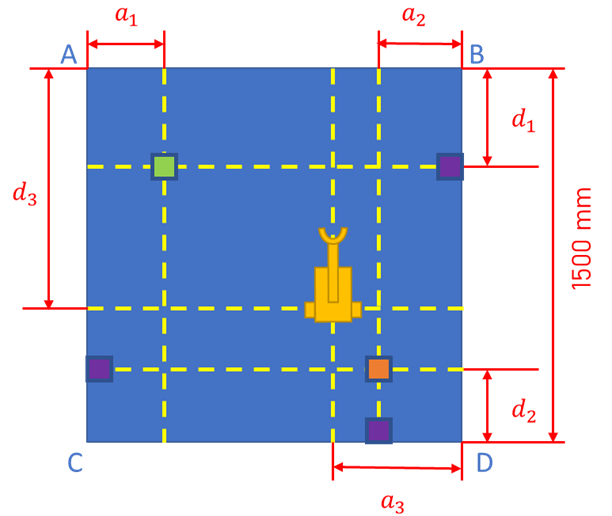
Figure 3 : arène avec le robot dans sa configuration de départ, l’objet dans ses configurations de départ (en vert) et d’arrivée (en orange), les obstacles fixes (violet).
Au top départ de l’arbitre, l’équipe actionne un bouton poussoir monté sur le robot. Le robot doit alors fonctionner en mode automatique (sans pilote ni aide humaine).
3. Score
Une partie de la note du module (10 points sur 20) est attribuée lors de la démonstration de la dernière séance (à 10h, 10h45 et 11h30, ordre de passage tiré au sort). Le barème est le suivant
|
Le robot se déplace après le top départ et s’arrête sans taper dans un obstacle |
1 point |
|
Le robot sait se déplacer en maintenant constante (à 5% près) une distance par rapport au muret. |
2 points |
|
Le robot sait détecter les bornes placées le long du muret et changer son comportement en conséquence |
1 point |
|
Le robot sait tourner de 90° (+/- 2) |
1 point |
|
Le robot sait saisir l’objet s’il est droit devant lui, à une distance inconnue |
2 points |
|
Le robot sait relâcher l’objet et se dégager, l’objet restant droit |
1 point |
|
L’objet est à moins de 3 cm/20 degrés du but à la fin |
1 point |
|
L’objet est à moins de 0,5 cm / 3 degrés du but à la fin |
1 point |
L’équipe dispose de deux essais, on garde la meilleure note. Si les deux essais aboutissent à une note inférieure à 5, l’équipe peut proposer une démonstration des capacités du robot correspondant à l’attribution de points (par exemple ils placent le robot en face de l’objet et l’objet prend le robot).
A noter que le score ne constitue que la moitié des points. Les 10 autres points seront attribués à l’équipe sur la base de :
- Qualité de l’organisation de l’équipe, sérieux, régularité de la progression
- Qualité de la conception (logicielle et matérielle)
- Qualité de la réalisation (logicielle et matérielle)
- Qualité du comportement du robot (maîtrise, robustesse, rapidité, etc.).
Lorsqu’il apparaît que la contribution des élèves au projet est raisonnablement bien répartie entre ses membres, tous les élèves ont la même note. Cependant, une modulation de +/- 3 points est possible individuellement à partir de :
- La contribution individuelle : sérieux, engagement, assiduité, prise d’initiative.
- La capacité à articuler son travail personnel avec celui du reste de l’équipe.
- La capacité à expliquer sa contribution personnelle et les choix retenus tout au long du projet.
4. Liste des fichiers fournis
- Ressources CAO.zip contient les fichiers Solidworks des composants fournis ou disponibles
- datashetts.zip contient les documentations de quelques-uns des composants fourni
No Comments