Projet Rob3 (Gaelle, Raphaël, Sofiane, Jean, Yves-Harold, Stanislas)
RobotPince
Informations
| NOM Prénom | |
| BENRABIA Sofiane | s.benavron@gmail.com |
| MARDIKIAN Gaelle | gaellemardikian29@gmail.com |
| MOUSSAY Raphaël | raphael.moussay@gmail.com |
| ORIEUX Jean | jeanorx@gmail.com |
| PINART MENUGE Stanislas | stanislas.pinart@gmail.com |
| VALCIUS Yves Harold | yvesharoldvalcius11@gmail.com |
Cursus
Polytech 3eme année | Spécialité: Robotique
Délais
Début: 13/02/24 | Fin: 06/06/24
But, objectifs et contexte
Le projet s’inscrit dans le cadre du projet de robotique. Il a pour but de concevoir, fabriquer et programmer un robot mobile autonome capable de manipuler un objet dans un environnement contraint. Plus précisément, le robot doit être en mesure de localiser un objet, de le saisir à l’aide d’un bras articulé muni d’une pince, de le déplacer et de le déposer avec précision à un emplacement cible au sein d’une arène délimitée. Ce projet met en œuvre des compétences en conception mécanique, en électronique embarquée et en programmation, notamment à travers l’utilisation d’un microcontrôleur Arduino et de capteurs permettant la détection et la navigation. Il s’inscrit dans un contexte pédagogique visant à initier les étudiants au travail en équipe autour d’un projet technique concret, en mobilisant des ressources disponibles au Fablab de Sorbonne Université. L'évaluation finale repose autant sur les performances du robot lors d’une démonstration que sur la qualité globale de la démarche de conception et de réalisation menée par l’équipe.
Matériel
Le matériel qu'on a à notre disposition sont les suivants :
3 moteurs
une pince motorisée
une carte Arduino UNO et un bus can
un bouton poussoir
deux roue à fixer sur les moteurs
une roue folle
des fils
deux labdeck
une batterie
Activités
|
13/02/2025 |
Activités |
Problèmes |
Prochain Objectifs |
|
Stanislas |
Compréhension du fonctionnement de l’ultrason. Mettre un capteur au niveau de l’essieu pour détecter les obstacles (horizontal), et un au niveau de la pince pour la hauteur de l'objet (vertical). |
||
|
Raphaël |
Aujourd'hui, j'ai créé deux fichiers DXF pour tester la découpe laser. Le premier fichier évalue les diamètres de 12,9 mm, 13 mm et 13,1 mm, tandis que le second teste les diamètres de 12,95 mm, 13,05 mm et 13,15 mm. Les deux fichiers incluent également un système d'assemblage avec des dents rectangulaires qui s'emboîtent pour relier les plaques entre elles. |
Aucun soucis à noter |
Lors de la prochaine séance, je devrai réaliser la découpe laser et tester l'ajustement avec les roulements |
|
Gaëlle |
Coder et tester le capteur l’ultrason Commencer à comprendre le fonctionnement de la pince (code et branchement) |
Imprécision du capteur |
Code de la pince |
|
Jean |
Recherche de solutions techniques pour le châssis pour répondre aux différents problèmes (hauteur de la roue pivotante trop élevée, position des lidars, etc...) |
Toujours pas de solutions viable |
Trouver une solution pour le châssis, pince + plateau |
|
Yves Harold |
Régler la précision du capteur ultrason Imprécision du capteur : 0.5 cm A quel position, et comment le capteur il capte la distance |
Le capteur capte tout droit et augmente un peu la distance mesurée quand y a un angle |
Position des capteurs, et code pour capter les bonnes distances |
|
Sofiane |
Recherche de solution mécanique pour réaliser le châssis, plus particulièrement la pince.
|
-Roue folle trop haute -Solution pour la pince: La descendre du bras, le bras aura une forme de Z |
Solution pour les roues |
|
GENERAL |
Finalisez le GANT + Châssis |
|
06/03/2025 |
Activités |
Problèmes |
Prochains objectifs |
|
Stanislas |
Schéma des ensembles roue/moteur. S’assurer de la MIP et de la MAP pour tous les éléments. Mesure des dimensions des composants grâce à solidworks. |
Mesurer les pièces précisément sur solidworks |
Dimensionner la pince |
|
Raphael |
Aujourd’hui, j’ai poursuivi les tests de découpe laser pour ajuster l’encastrement des roulements et des liaisons entre les plaques. Après avoir constaté que le diamètre de 12,9 mm commençait à encastrer, j’ai testé des diamètres de 12,85 mm et 12,8 mm. Le diamètre de 12,85 mm était encore légèrement trop grand, tandis que celui de 12,8 mm a permis un encastrement parfait avec le roulement. Les liaisons entre les planches ont également bien fonctionné avec les dimensions de rectangles choisies (5,2 mm x 4,8 mm). |
Mauvaise échelle des pièces découpés lors de l'utilisation d’Inscape |
Modéliser le châssis |
|
Gaëlle |
Réaliser la communication entre la pince et Arduino. Branchement du moteur avec le bus CAN |
Assemblage de la pince compliqué pour avoir une rotation cohérente |
Code pour commander le moteur |
|
Jean |
Schéma du châssis, du bras et des pivots, ainsi que la pince et le capteur au bout du bras. Début des mesures de chaque pièces Résolution des problèmes de la semaine dernière concernant les solutions de la pince et de la forme du châssis |
Mauvais schéma de la roue et du pivot châssis/pince |
Dimensionnement du châssis et de la pince pour modélisation |
|
Yves-Harold |
Structure de code pour commander le moteur, Communication du CAN avec le moteur. |
Problème code pour faire tourner les moteurs |
Faire tourner les moteurs un à un et ensuite indépendamment |
|
Sofiane |
/ |
/ |
/ |
|
20/03/2025 |
Activités |
Problèmes |
Prochain Objectifs |
|
Stanislas |
Calcul avec des inconnues des dimensions du bras qui porte la pince et le capteur, les barres qui pivotent. Réglage des derniers problèmes de dimensionnement de la pince. Schématisation finales |
Largeur de la pince vis à vis de la largeur du bras → Écart de 6 mm et résolu en écartant le bras avec deux pièces rallonges |
Assemblage des pièces du robot |
|
Raphaël |
Modélisation du châssis à partir des schémas. Test d’usinage des encastrements pour les détecteurs de distance -> Diamètre d’usinage 16 mm |
Problème de taille d’encastrement → Résolu avec 2/10 de millimètres |
Usinage de toutes les pièces |
|
Gaëlle |
Mise en commun des codes moteurs et des détecteurs de distance pour commander les moteurs en fonction des distances récupérées. |
Problème avec la communication arduino |
Finir l’algorithme reliant distance et moteurs |
|
Jean |
Assemblage des roues sur leur support et les moteurs. Finalisation des problèmes liés au dimensionnement des fixation moteurs. |
Taille de trous pour les vis→ perçage |
Recherche et mise en place de l’odométrie |
|
Yves Harold |
Créer les fonctions de déplacement en changeant les consignes moteurs. Indépendance des moteurs en fonction des ID. |
Création des tableaux en fonction des ID. Fonction loop() mal géré pour stopper les moteurs |
Finir commande des moteurs en vitesse et en position |
|
Sofiane |
Mécanique:
Algorithme:
|
l’équation du mouvement en translation dépend de l’angle du bas au lieu de la vitesse du moteur, et donne la valeur d’une longueur clé mais pas du déplacement nécessaire |
Finir l’équation du mouvement en translation. |
| 18/04/2025 | Activités | Problèmes | Prochains Objectifs |
| Raphaël | Modélisation de toutes les pièces, création des sous-assemblages et de l'assemblage final sur Solidworks | Découpe laser des pièces et assemblage du robot |
|
14/05/2025 |
Activités |
Problèmes |
Prochain Objectifs |
|
Stanislas |
|||
|
Raphaël |
Transformation de toutes les pièces en format DXF et découpe laser des pièces. Assemblage du robot |
||
|
Gaëlle |
|||
|
Jean |
Découpe au laser des pièces. Assemblage du robot |
||
|
Yves Harold |
Odométrie pour mesurer la distance et angle | ||
|
Sofiane |
|
||
|
GENERAL |
|
|
15/05/2025 |
Activités |
Problèmes |
Prochain Objectifs |
|
Stanislas |
Amélioration du Gant. Formule du temps de rotation pour obtenir l’angle du bras du robot, pour le code arduino. |
||
|
Raphaël |
Finaliser la modélisation des pièces supplémentaires (Crochet pour moteurs), mise en place des différentes pièces sur le robot Perçage et collage de certains emboîtement pour faciliter le montage |
||
|
Gaëlle |
Coder le moteur du bras du robot spécifiquement la limite d’angle |
Finir le code pour bras pince |
|
|
Jean |
Mise en page du rapport avec dessin et schéma. Mise en place des différentes pièces sur le robot |
Le rapport |
|
|
Yves Harold |
Bonne lecture de l'état des moteurs et odométrie. |
finaliser l’odométrie pour commander en angle ou en distance. |
|
|
Sofiane |
Travail sur le rapport, mise en page. Théorie angle distance pour la pince |
||
|
GENERAL |
Bras trop lourd |
|
| 04/06/2025 | Activités | Problèmes | Prochains objectifs |
| Stanislas |
Code en delay du temps pendant lequel les moteurs tournent une fois la balise trouvée, avant de tourner et être face à l'objet. Calcul du recul pour poser l'objet au bon endroit |
Hauteur inconnue de la zone saisissable de l'objet -> approximation | |
| Raphaël | Mise en place de l'élastique pour compenser le poids du bras. Code du bouton poussoir pour démarrer et arrêter le code global. | ||
| Gaëlle |
Code du capteur de la pince pour repérer et attraper l'objet | ||
| Jean | Bouton poussoir: découpe pour l'installer sur le robot et branchements sur la labdeck | ||
| Yves Harold | Implémenter les fonctions pour avancer d'une certaine distance et tourner, en utilisant l'odométrie. | Ne marche pas avec ReadMotorState | |
| Sofiane | Amélioration du rapport |
| 05/06/2025 | Activités | Problèmes | Prochains Objectifs |
|
Stanislas |
Finalisation du Gant et des activités | ||
|
Raphaël |
Refonte du code global | ||
| Gaëlle | Refonte du code global | ||
| Jean | Refonte du code global | ||
| Yves Harold | Refonte du code global. Gant | ||
| Sofiane | Finalisation du rapport |
Solution technique
Principe:
Le robot possède deux roues motorisées à l'arrière et une roue folle à l'avant. Un bras actionné par un troisième moteur est attaché sur lui. Le robot possède deux capteurs ultrasons qui lui permettent de s'orienter.
- Le bras est composé de trois parties, celle à laquelle est fixée la pince est relié au corps du robot par deux barres parallèles, de sorte à ce que la pince soit toujours horizontale.
- Les roues arrières sont contrôlées grâce aux moteurs en utilisant l'odométrie pour permettre un mouvement de rotation.
- Un moteur est utilisé pour abaisser remonter le bras.
- Un capteur ultrason est placé sur la pince pour qu'il soit capable de trouver la poignée de l'objet
- Un capteur ultrason est placé sur son flan droit pour l'aider à s'orienter.
Croquis:

Problèmes:
- Le Bras étant trop lourd, le moteur n'a pas assez de couple pour le remonter.
- La pince est trop haute même si le bras est au plus bas
Solution:
Nous avons choisit de placer un élastique à l'arrière du bras pour compenser son poids. Nous avons choisit cette solution plutôt qu'un contrepoids car ne demandait moins de matériel et était très simple à ajouter à notre robot. Sur la barre horizontale, nous avons aussi démonté la partie supérieure, car même si elle assurait une rigidité elle était trop lourde, et sans, la rigidité reste suffisante.
Pour le problème de la pince, on rajoute au bout du bras une structure permettant de placer la pince et le capteur.
Conception détaillée
Plan:
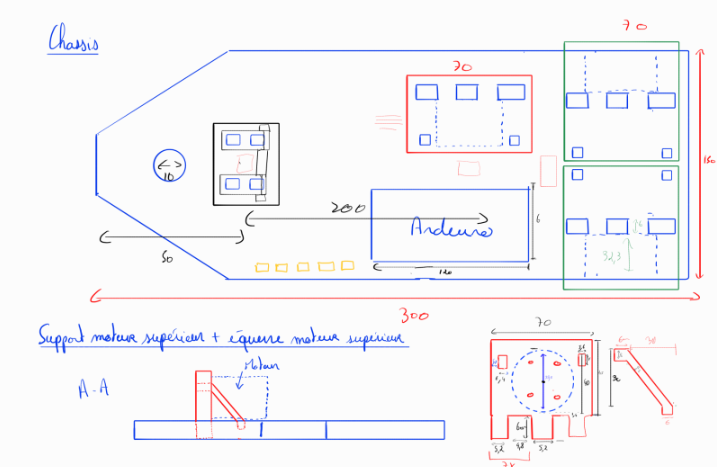
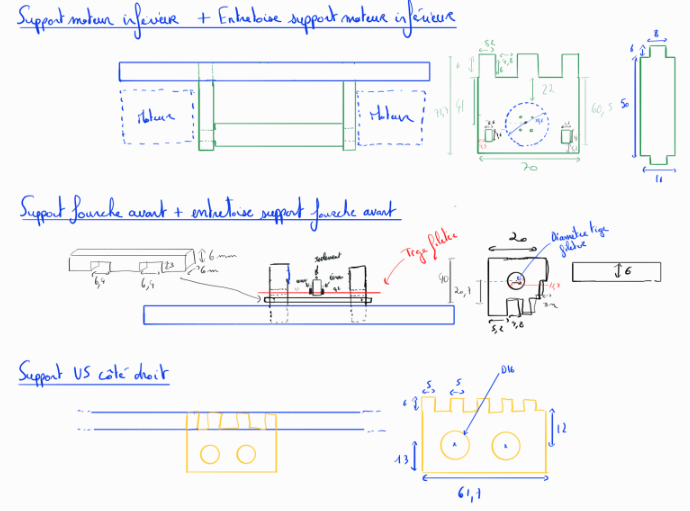
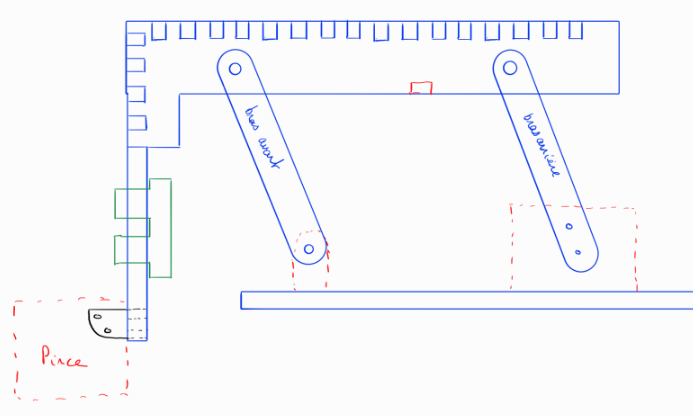

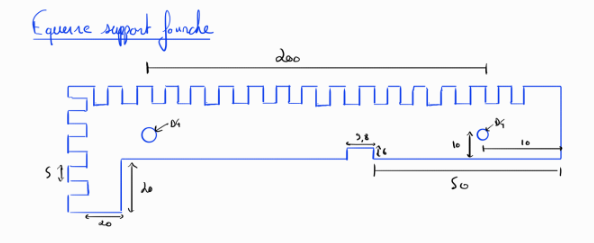
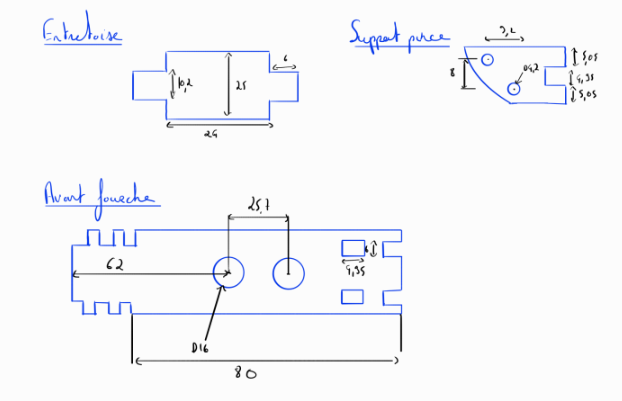
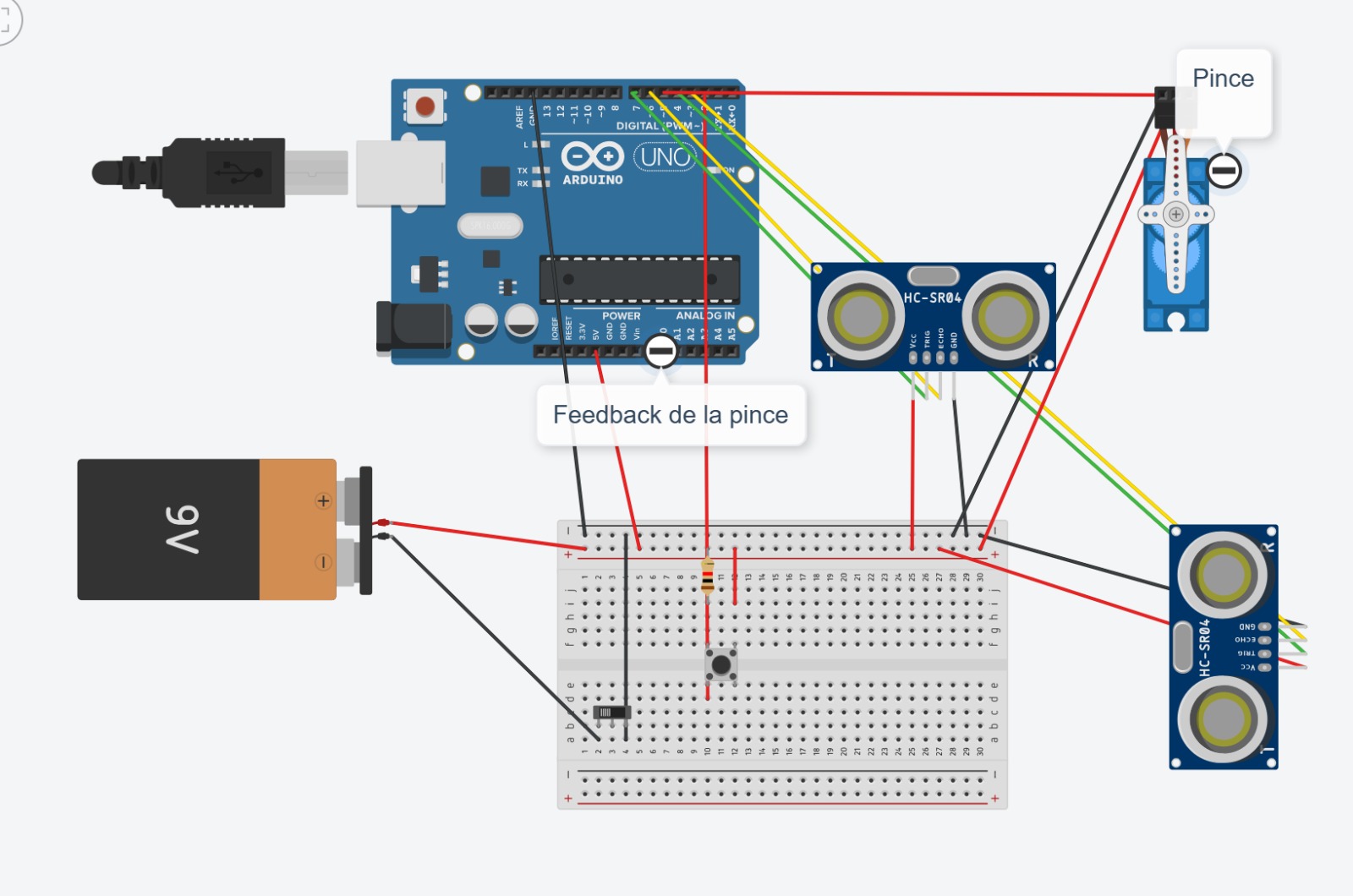
Schéma électronique:
Sur notre schéma nous avons un interrupteur qui nous permet d'allumer le robot et un bouton permettant de l'activer.
Modélisation 3D:

Programmation
Organigramme:

No Comments